ผศ. ดร.วุฒิพล ธาราธีรเศรษฐ์
ภาควิชาวิศวกรรมไฟฟ้า คณะวิศวกรรมศาสตร์ มหาวิทยาลัยศรีนครินทรวิโรฒ
เรียนรู้และเข้าใจการวัดสัญญาณรบกวนแม่เหล็กไฟฟ้าทางสายตัวนำ
ปัญหาความเข้ากันได้ทางแม่เหล็กไฟฟ้าคงไม่เกิดขึ้น หากสัญญาณที่เกิดขึ้นจากการทำงานของวงจรอิเล็กทรอนิกส์เป็นสัญญาณไซน์บริสุทธิ์และมีเพียงความถี่เดียว อย่างไรก็ตาม ในทางปฏิบัติสัญญาณของทั้งกระแสและแรงดันที่ไหลอยู่ในระบบส่งจ่ายไฟฟ้ากำลังมักจะถูกรบกวนในรูปผลชั่วครู่ของสัญญาณ (transient effect) หรือมีส่วนผสมขององค์ประกอบความถี่สูงมาก และการรบกวนในรูปแบบอื่นๆ ทำให้สัญญาณเหล่านั้นเกิดการผิดเพี้ยนไปจากสัญญาณไซน์บริสุทธิ์ ยิ่งผิดเพี้ยนจากสัญญาณไซน์มากเท่าไหร่ก็จะยิ่งก็ให้เกิดปัญหาความเข้ากันได้ทางแม่เหล็กไฟฟ้ามากยิ่งขึ้นเท่านั้น สำหรับตัวอย่างของสัญญาณรบกวนในรูปผลชั่วครู่จะได้แก่ ปรากฏการณ์ฟ้าผ่าและกระแสกระชากที่เกิดจากการทำงานของเครื่องใช้ไฟฟ้าและอิเล็กทรอนิกส์เป็นต้น โดยสัญญาณรบกวนที่เกิดขึ้นจะแทรกสอดไปตามสายตัวนำและสามารถส่งผลกระทบต่อ อุปกรณ์ เครื่องมือ หรือระบบอื่นๆที่ต่ออยู่ร่วมกันในสายตัวนำของระบบไฟฟ้าเดียวกันได้ ซึ่งปรากฏการณ์การแทรกสอดในลักษณะนี้ ตามมาตรฐานนิยามว่าคือ สัญญาณรบกวนแม่เหล็กไฟฟ้าทางสายตัวนำ (conducted electromagnetic interference: conducted EMI) และตามมาตรฐาน FCC และ CISPR จะพิจารณาในย่านความถี่ 150kHz – 30MHz เท่านั้น และเพื่อให้มั่นใจได้ว่าสัญญาณรบกวนทางสายตัวนำที่ตรวจวัดได้เกิดจากบริภัณฑ์ที่ทำการทดสอบจริง สัญญาณรบกวนที่แทรกสอดตามสายตัวนำที่เกิดจาก อุปกรณ์ เครื่องมือ หรือระบบอื่นๆ จะต้องถูกกำจัดออกไป นอกจากนั้นเนื่องจากการทดสอบบริภัณฑ์จำเป็นจะต้องรับกำลังไฟฟ้าจากระบบไฟฟ้ากำลังที่ซึ่งอิมพีแดนซ์ของวงจรมีค่าไม่คงที่ทำให้ผลการทดสอบคลาดเคลื่อนได้และไม่เป็นมาตรฐานเดียวกัน ด้วยสาเหตุดังกล่าวนี้ มาตรฐานสากลจึงได้กำหนดให้ใช้อุปกรณ์ที่เรียกว่า โครงข่ายสร้างเสถียรภาพอิมพีแดนซ์ (line impedance stabilization network: LISN) เพื่อทำหน้าที่ดังกล่าว สำหรับจุดประสงค์หลักของบทความฉบับนี้จะเป็นการวิเคราะห์ให้เห็นจริงว่าเหตุใดตามมาตรฐานสากลจึงกำหนดเครื่องมือที่ใช้และรูปแบบการจัดวางอุปกรณ์และสายเชื่อมต่อต่างๆในการตรวจวัดสัญญาณรบกวนแม่เหล็กไฟฟ้าทางสายตัวนำที่ชัดเจนและลงรายละเอียดมากเพื่อให้นักออกแบบวงจรอิเล็กทรอนิกส์มีความรู้ความเข้าใจถึงเหตุผลดังกล่าวข้างต้น
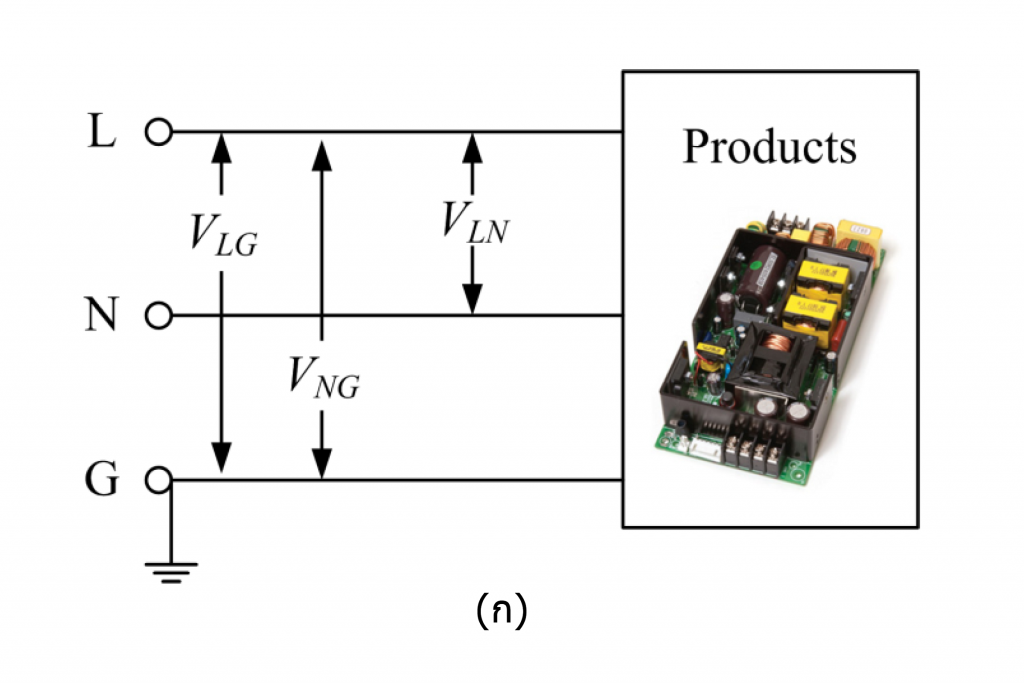
สัญญาณรบกวนแม่เหล็กไฟฟ้าทางสายตัวนำสามารถแบ่งได้เป็น 2 โมดด้วยกัน คือ กระแส/แรงดันในโมดผลร่วม (common-mode emission) และกระแส/แรงดันในโมดผลต่าง (differential-mode emission) โดยสัญญาณรบกวนในโมดผลร่วมจะนิยามว่าคือความต่างศักย์ ระหว่างสายตัวนำที่มีกระแสไหลเทียบกับกราวด์ (ที่ไม่ต้องการให้เกิดขึ้น) ในขณะที่สัญญาณรบกวนในโมดผลต่างจะนิยามว่าคือความต่างศักย์ระหว่างสายตัวนำที่มีกระแสไหล (ที่ไม่ต้องการให้เกิดขึ้น) ซึ่งสามารถเขียนแทนเป็นสมการได้เป็น
VCM = (VLG + VNG) / 2 (1)
VDM = (VLG + VNG) / 2 (2)
โดย VCM และ VDM คือแรงดันโมดผลร่วมและโมดผลต่างตามลำดับ และให้ VLG และ VNG เป็นแรงดันระหว่างสายไลน์ (หรือสายเฟส) กับกราวด์และแรงดันระหว่างสายนิวทรัลกับกราวด์ตามลำดับ
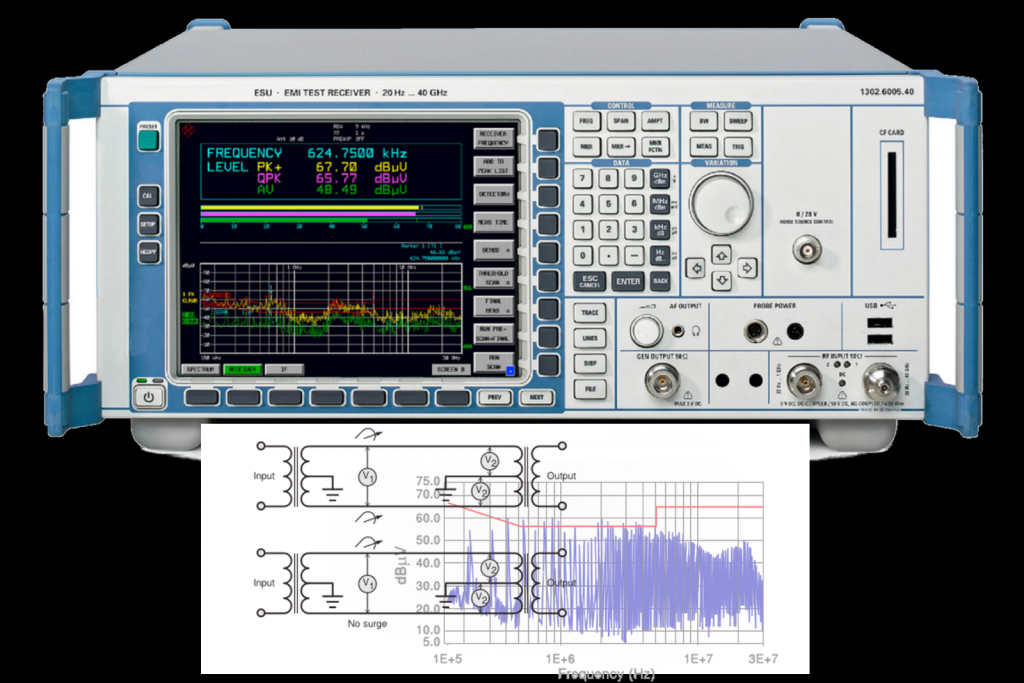
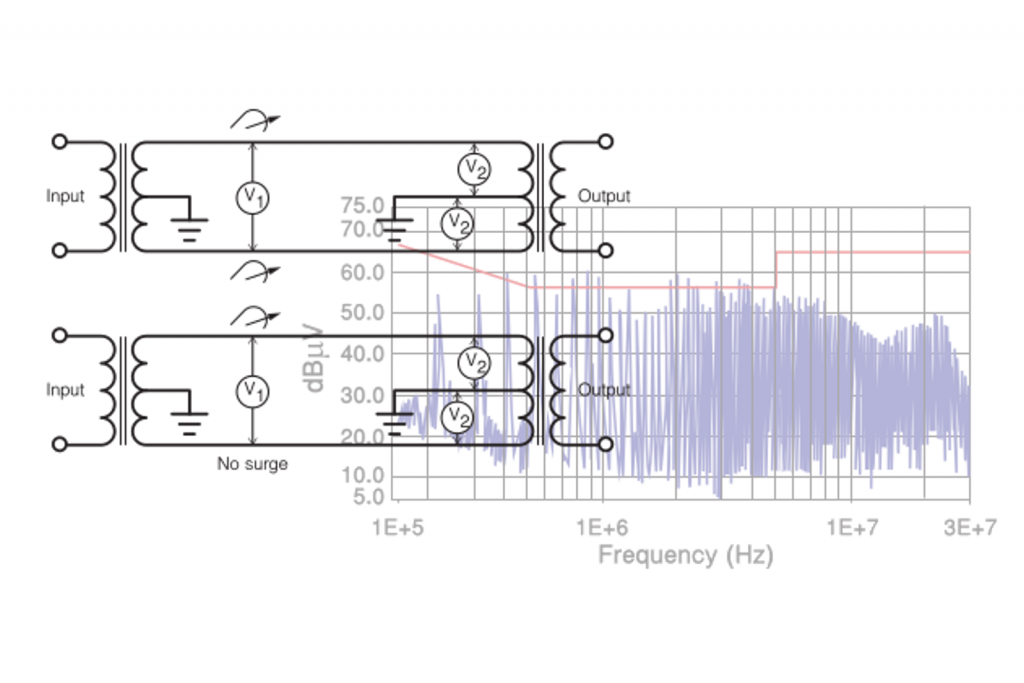
และเพื่อให้เห็นภาพชัดเจนยิ่งขึ้น พิจารณารูปที่ 1(ข) ซึ่งแสดงวงจรสมดุล โดยหม้อแปลงทั้งสองลูกต่างก็มีจุดต่อกึ่งกลางและไม่มีการต่อลงกราวด์แต่ประการใด ถ้าสมมุติว่าจู่ๆ ก็มีสัญญาณรบกวนในรูปแรงดันเกิดขึ้นบนสายตัวนำทั้งสองเส้นของหม้อแปลงไฟฟ้า จะเห็นได้ว่าโวลต์มิเตอร์ V1 จะไม่สามารถอ่านค่าความต่างศักย์ที่เกิดขึ้นได้หรือมีค่าเป็นศูนย์ ในขณะที่โวลต์มิเตอร์ V2 จะสามารถอ่านค่าได้ ซึ่งหลักการนี่คือสัญญาณรบกวนในรูปโมดผลร่วม
ในทำนองกลับกัน หากสมมุติให้จู่ๆ สัญญาณรบกวนในรูปแรงดันก็เกิดขึ้นบนสายตัวนำเส้นเดียว (ด้านบน) ของหม้อแปลงไฟฟ้า ดังแสดงในรูปที่ 1 (ค) ซึ่งจะเห็นได้ว่าโวลต์มิเตอร์ V1 และ V2 จะสามารถอ่านค่าได้ และนี่คือสัญญาณรบกวนในรูปโมดผลต่างนั่นเอง
หากพิจารณาในรูปแบบของกระแส กระแสในโมดผลร่วมจะนิยามว่าคือ กระแสที่มีทิศทางพุ่งออกจากทั้งสายไลน์และสายนิวทรัลและไหลกลับผ่านสายกราวด์ แต่กระแสในโมดผลต่างจะมีทิศทางไหลออกจากสายไลน์และไหลกลับผ่านสายนิวทรัล ดังแสดงในรูป 2 (ก) และ (ข) ตามลำดับ
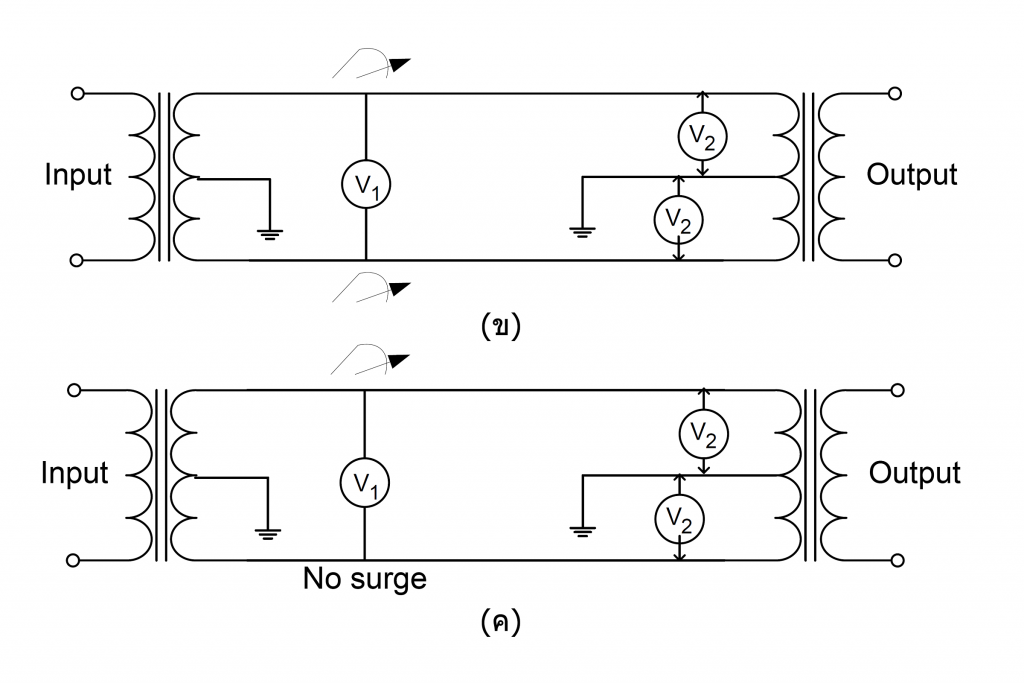
รูปที่ 1 สัญญาณรบกวนโมดผลร่วมและแบบโมดผลต่าง
สัญญาณรบกวนหรือการแทรกสอดในโมดผลต่างและผลร่วมจะมีกลไกการเกิดขึ้นที่แตกต่างกันซึ่งการเข้าใจถึงกลไกดังกล่าวจะช่วยให้สามารถทำการวัดได้อย่างถูกต้องและสามารถแก้ไขปัญหาสัญญาณรบกวนได้อย่างตรงจุด พิจาราณารูปวงจรในรูปที่ 2 (ก) สัญญาณรบกวนโมดผลร่วมไหลผ่านบริเวณตำแหน่ง A เข้าสู่หม้อแปลงไฟฟ้าซึ่งหม้อแปลงไฟฟ้าในอุดมคติจะสามารถป้องกันสัญญาณรบกวนโมดผลร่วมดังกล่าวได้เพราะทำหน้าที่ในการแยกโดดสัญญาณไฟฟ้า อย่างไรก็ตามในทางปฏิบัติหม้อแปลงไฟฟ้าจะมีตัวเก็บประจุแฝงระหว่างขดลวดด้านปฐมภูมิและทุติภูมิ ทำให้สัญญาณรบกวนโมดผลร่วมสามารถทะลุผ่านไปยังฝั่งทุติภูมิได้ และนอกจากสัญญาณรบกวนโมดผลร่วมจะสามารถทะลุผ่านไปได้แล้ว คลื่นแม่เหล็กไฟฟ้าที่เกิดขึ้นจากสัญญาณรบกวนโมดผลร่วมดังกล่าวนี้หรือเกิดจากแหล่งกำเนิดอื่นก็สามารถเชื่อมต่อทำให้เกิดสัญญาณรบกวนโมดผลร่วมขึ้นที่ตำแหน่ง B หรือฝั่งทุติยภูมิของหม้อแปลงได้อยู่นั่นเอง นอกจากนั้น สัญญาณรบกวนโมดผลร่วมจากอุปกรณ์อื่นๆ ในรูปกระแสที่ไหลในสายกราวด์ก็เกิดขึ้นได้เช่นเดียวกัน ดังแสดงในตำแหน่ง C อีกหนึ่งตัวอย่างของการเกิดสัญญาณรบกวนโมดผลร่วมคือที่ตำแหน่ง D ซึ่งเกิดการเชื่อมต่อผ่านทางสายเคเบิลที่ต่ออยู่ระหว่างอุปกรณ์ต่างๆ โดยสายเคเบิลจะทำให้ลูปกราวด์ในระบบเพิ่มขึ้นและขนาดของสัญญาณรบกวนโมดผลร่วมที่เกิดขึ้นจะขึ้นอยู่กับโครงสร้างของทั้งระบบและอิมพีแดนซ์ของระบบกราวด์ของระบบดังกล่าว
สำหรับวงจรดังแสดงในรูป 2 (ข) แสดงสัญญาณรบกวนในโมดผลต่าง สมมุติกำหนดให้มีสัญญาณรบกวนโมดผลต่างเกิดขึ้นที่ตำแหน่ง E ซึ่งสัญญาณรบกวนโมดผลต่างจะสามารถเชื่อมต่อไปยังฝั่งทุติภูมิของหม้อแปลงไฟฟ้าได้เหมือนกรณีสัญญาณไฟฟ้ากระแสสลับทั่วไป การเปิดปิดของสวิตช์ F ที่ต่ออยู่กับโหลดหรืออุปกรณ์อื่นๆ จะสามารถทำให้เกิดสัญญาณรบกวนโมดผลต่างหรือเกิดปรากฏการณ์การเปลี่ยนแปลงของสภาพไฟฟ้า (แรงดันและกระแส) ในเวลาทันทีทันใดจากสภาพปกติซึ่งนิยามเรียกว่า ภาวะชั่วครู่ (transient) ในทำนองเดียวกัน การเปลี่ยนแปลงของอิมพีแดนซ์ของแหล่งจ่าย G ก็จะสามารถทำให้เกิดภาวะชั่วครู่ได้เช่นเดียวกัน
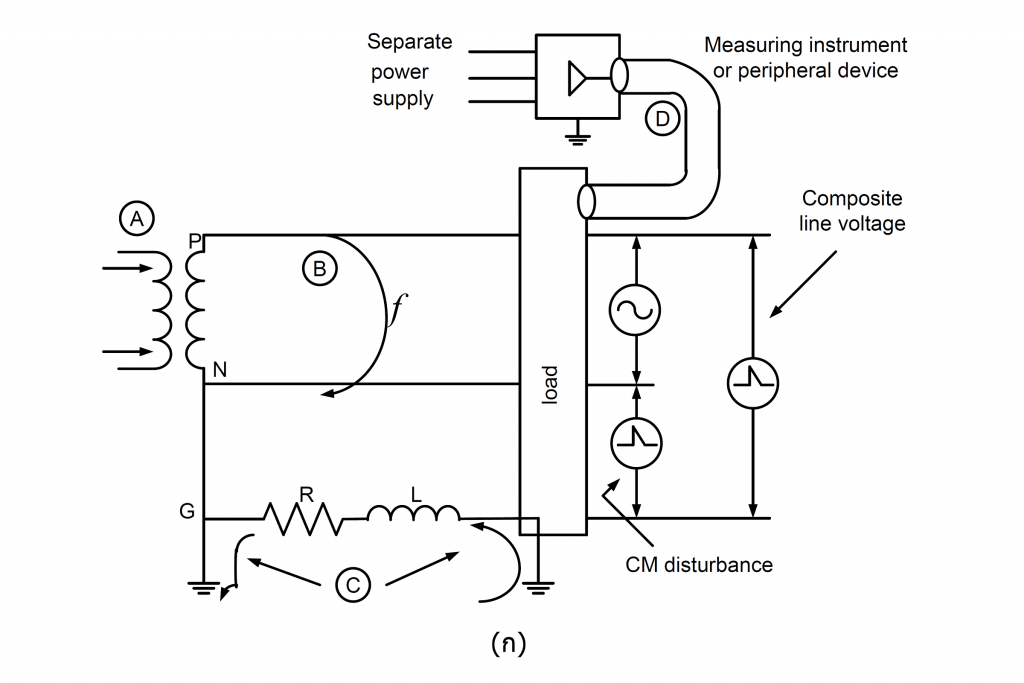

รูปที่ 2 ตัวอย่างของการแทรกสอด (ก) แบบโมดผลร่วม (ข) แบบโมดผลต่าง
เป็นที่ทราบกันโดยทั่วไปว่าอิมพีแดนซ์ของระบบไฟฟ้ากำลังจะมีค่าไม่เท่ากันขึ้นอยู่กับหลายปัจจัย ซึ่งอิมพีแดนซ์ของระบบไฟฟ้ากำลังนี้สามารถส่งผลกระทบโดยตรงต่อผลที่วัดได้ของสัญญาณรบกวนแม่เหล็กไฟฟ้าที่เกิดจากบริภัณฑ์ทดสอบ และเพื่อให้เป็นมาตรฐานเดียวกันและสามารถวัดซ้ำได้โดยผลที่วัดได้ไม่แตกต่างกันและไม่ขึ้นกับสถานที่ทดสอบ โดย CISPR ได้นำเสนออุปกรณ์ที่ทำหน้าที่ในการคงค่าอิมพีแดนซ์ให้มีค่าคงที่และยังสามารถกรองสัญญาณรบกวนที่แทรกสอดมาตามสายตัวนำจากภายนอกได้อีกด้วยซึ่งเรียกว่า โครงข่ายสร้างเสถียรภาพอิมพีแดนซ์ (Line Impedance Stabilization Network: LISN) หรือนิยมเรียกย่อๆว่า “ลิซึ่น”
โดยในตอนแรก ในปี ค.ศ 1972 CISPR ได้กำหนดค่าอิมพีแดนซ์ไว้ที่ 150W± 20W อย่างไรก็ตาม ในปี ค.ศ 1973 J.R. Nicholson และ J.A. Malack ได้ทำการวัดค่าอิมพีแดนซ์ของระบบไฟฟ้ากำลัง 115 V ที่ความถี่ต่างๆ เป็นจำนวน 36 แห่งในหลายที่ในประเทศสหรัฐอเมริกา ซึ่งผลที่ได้ค่าอิมพีแดนซ์จะอยู่ในช่วง 2 โอหม์ถึง 450 โอห์ม และค่าเฉลี่ยที่ได้ก็น้อยกว่าค่าที่กำหนดโดย CISPR มากคือที่ 150 โอห์ม ดังนั้น CISPR ได้ระบุค่ามาตรฐานอิมพีแดนซ์ใหม่ให้ใกล้เคียงความจริงมากที่สุด โดยระบุให้อิมพีแดนซ์คงที่อยู่ที่ 50W± 20W แทน ซึ่งการทำงานของโครงข่ายสร้างเสถียรภาพอิมพีแดนซ์จะกล่าวในรายละเอียดอีกครั้งในหัวข้อของโครงข่ายสร้างเสถียรภาพอิมพีแดนซ์
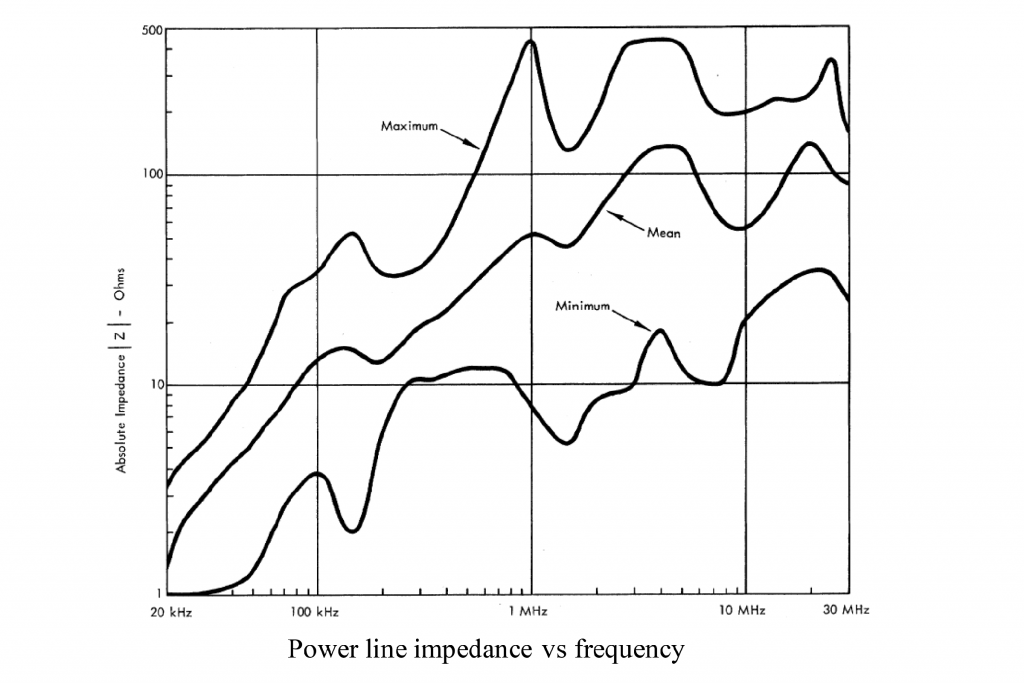
รูปที่ 3 ผลการวัดอิมพีแดนซ์ของระบบไฟฟ้ากำลัง 115 V โดย J.R. Nicholson และ J.A. Malack [9]
ในการวัดสัญญาณรบกวนแม่เหล็กไฟฟ้าทางสายตัวนำจะประกอบไปด้วยอุปกรณ์หรือเครื่องมือวัดที่ต้องใช้ในการวัดและขั้นตอนการทดสอบและติดตั้งเพื่อให้เป็นไปในมาตรฐานเดียวกัน มีความแม่นยำสูงโดยที่สามารถวัดซ้ำได้ โดยในหัวข้อนี้จะกล่าวเน้นเฉพาะเครื่องมือวัดที่จำเป็นต้องใช้ ดังต่อไปนี้
โครงข่ายสร้างเสถียรภาพอิมพีแดนซ์
Line impedance stabilization network (LISN) หรือ Artificial Main Network (AMN) หรือในชื่อภายไทยคือ โครงข่ายสร้างเสถียรภาพอิมพีแดนซ์ เป็นอุปกรณ์ที่ใช้ในการวัดสัญญาณรบกวนแม่เหล็กไฟฟ้าทางสายตัวนำที่เกิดจากตัวบริภัณฑ์ทดสอบ เพื่อให้การวัดมีความแม่นยำและวัดซ้ำได้ โครงข่ายสร้างเสถียรภาพอิมพีแดนซ์จะถูกต่ออยู่ระหว่างแหล่งจ่ายไฟฟ้ากำลังกับบริภัณฑ์ทดสอบดังแสดงในรูปที่ 4 โดยหากอ้างอิงตาม CISPR 16-1 นอกจากจะกำหนดการออกแบบและรายละเอียดต่างๆของ LISN แล้วยังได้ระบุหน้าที่ของโครงข่ายสร้างเสถียรภาพอิมพีแดนซ์ว่าจะต้อง
ดังแสดงในรูปที่ 4 จะเห็นได้ว่าตัว LISN จะประกอบไปด้วย 3 ทางเข้าออก (ports) ด้วยกัน
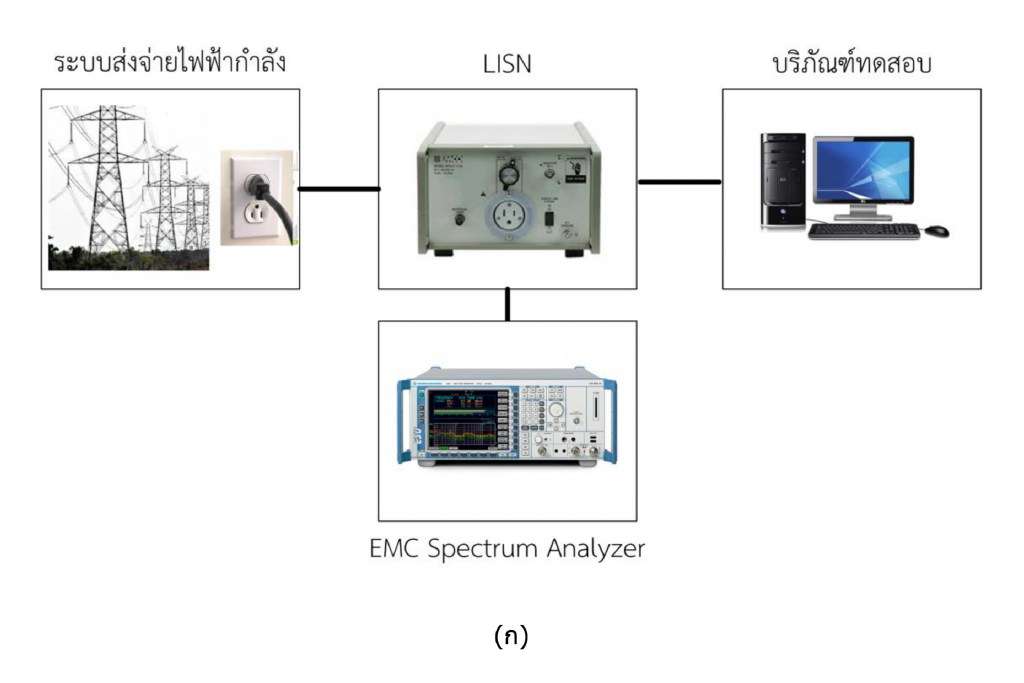
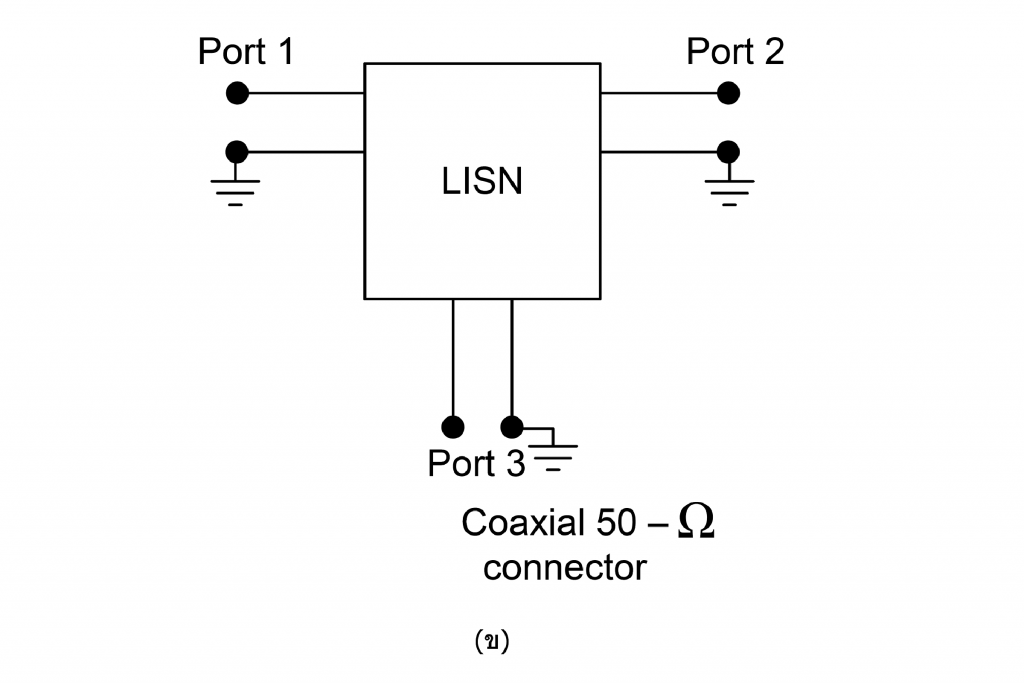
รูปที่ 4 (ก) ตำแหน่งการวาง LISN ในการวัดสัญญาณรบกวนทางสายตัวนำที่เกิดจากบริภัณฑ์ทดสอบ (ข) จำนวนทางเข้าออกของ LISN
โดยทางเข้าออกแรกจะต่ออยู่กับระบบไฟฟ้ากำลัง ทางเข้าออกที่สองจะต่ออยู่กับด้านอินพุตของบริภัณฑ์ทดสอบ และทางเข้าออกที่สามจะมีค่าอิมพีแดนซ์เท่ากับ 50 โอห์ม และจะต่ออยู่กับขั้วต่อของเครื่องมือวัด เช่น เครื่องมือวิเคราะห์สัญญาณที่มีอิมพีแดนซ์เท่ากับ 50 โอห์ม เช่นเดียวกัน

(ก)
(ข)
(ค)
(ง)
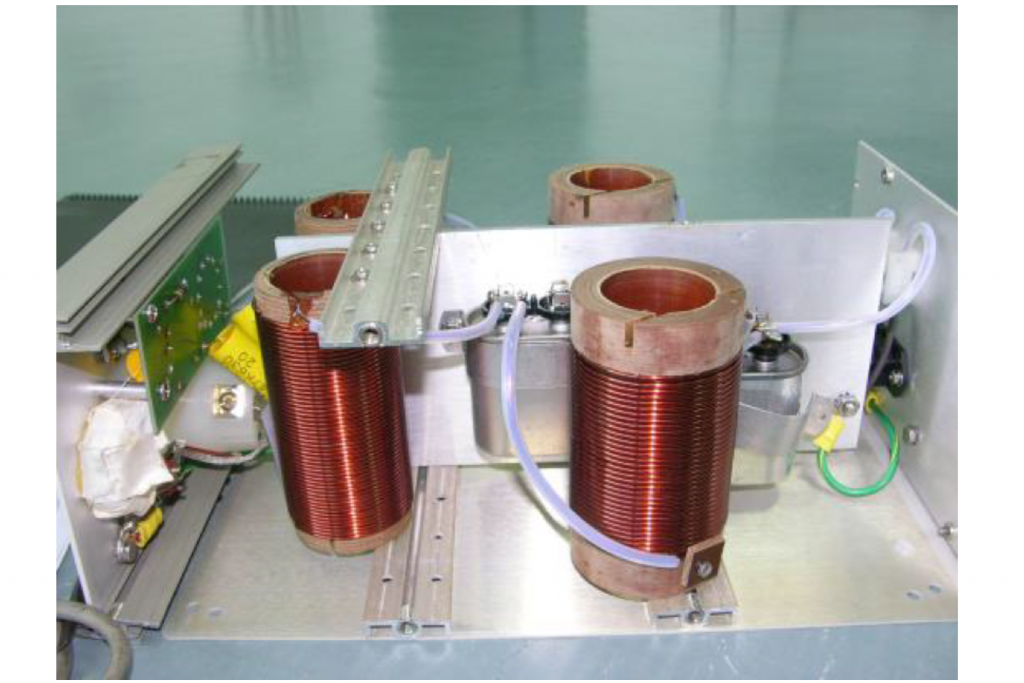
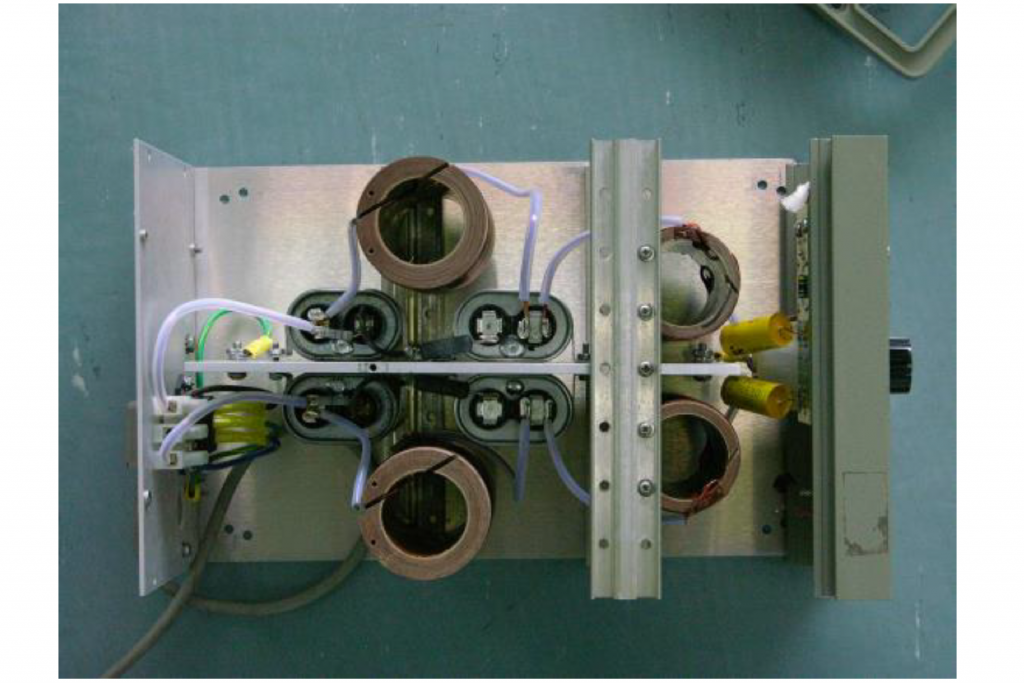
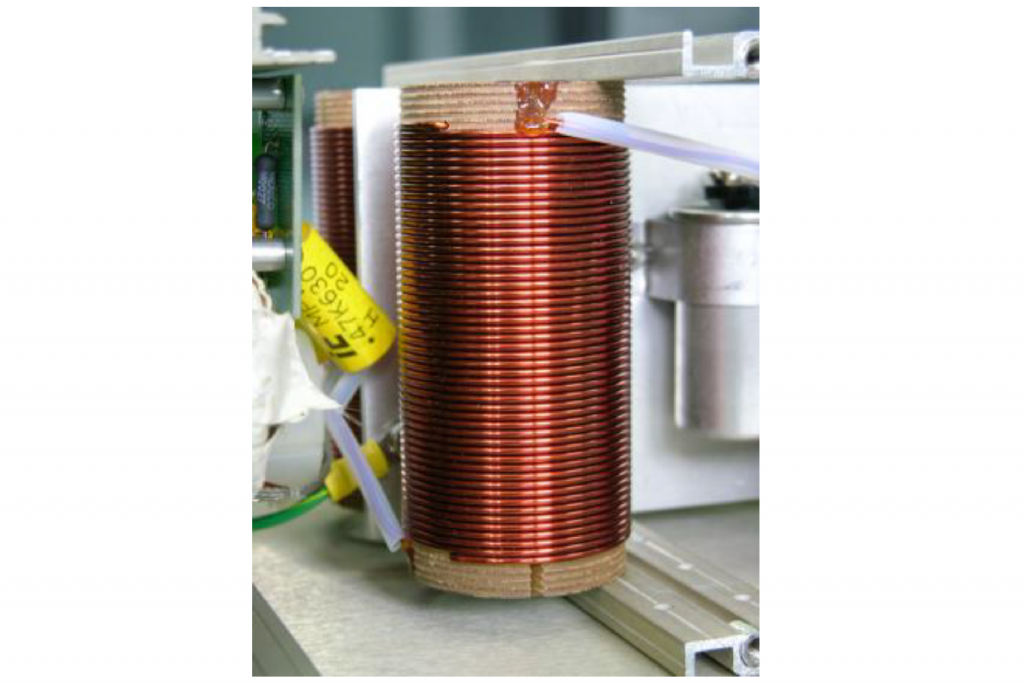
รูปที่ 5 ตัวอย่างโครงข่ายสร้างเสถียรภาพอิมพีแดนซ์ยี่ห้อ EMCO รุ่น 3810-2
(ก) ภาพด้านหน้า (ข) ภาพเมื่อถอดโครงออก (ค) ภาพด้านบนเมื่อถอดโครงออก (ง) ภาพตัวเหนี่ยวนำ
โดย CISPR 16 ได้แบ่งรูปแบบวงจรของ LISN ไว้ 2 แบบด้วยกันใหญ่ๆด้วยกัน คือ แบบ V-network ซึ่งใช้วัดสำหรับแรงดันอสมมาตรและ delta-network ซึ่งใช้วัดแรงดันสมมาตรและอสมมาตรแยกออกจากกัน ซึ่งมีรายละเอียดดังนี้
(ก)
(ข)
(ค)
(ง)
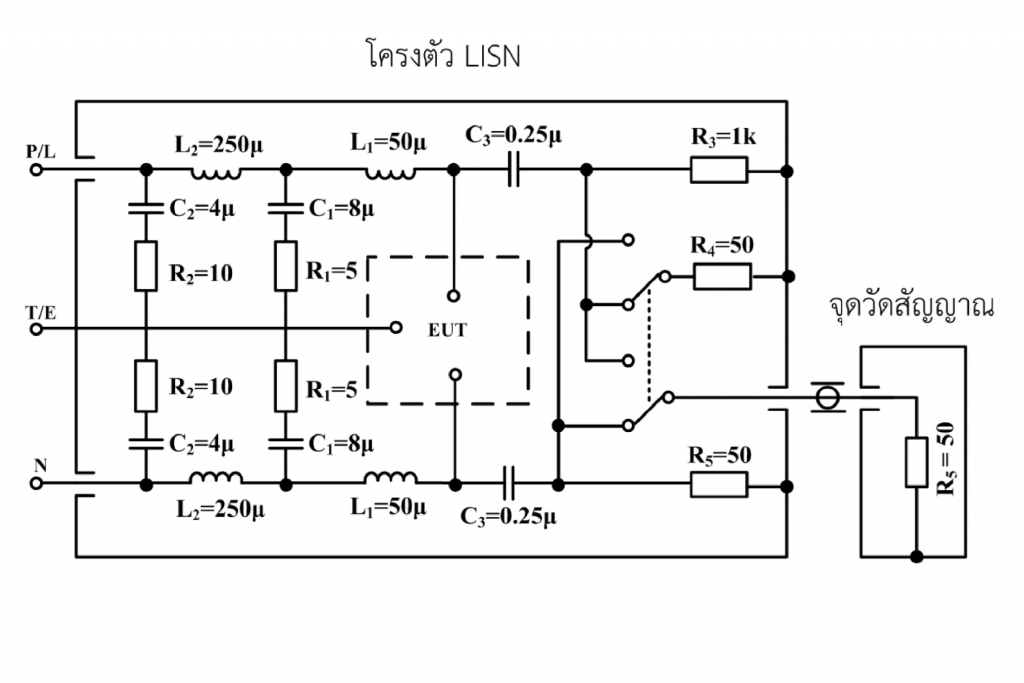
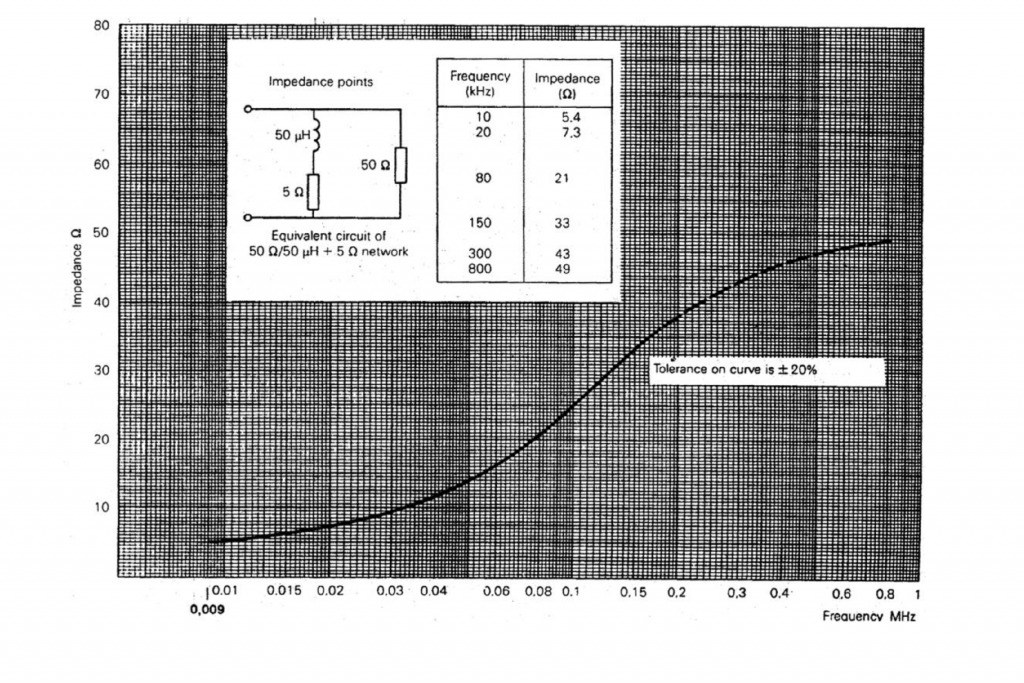
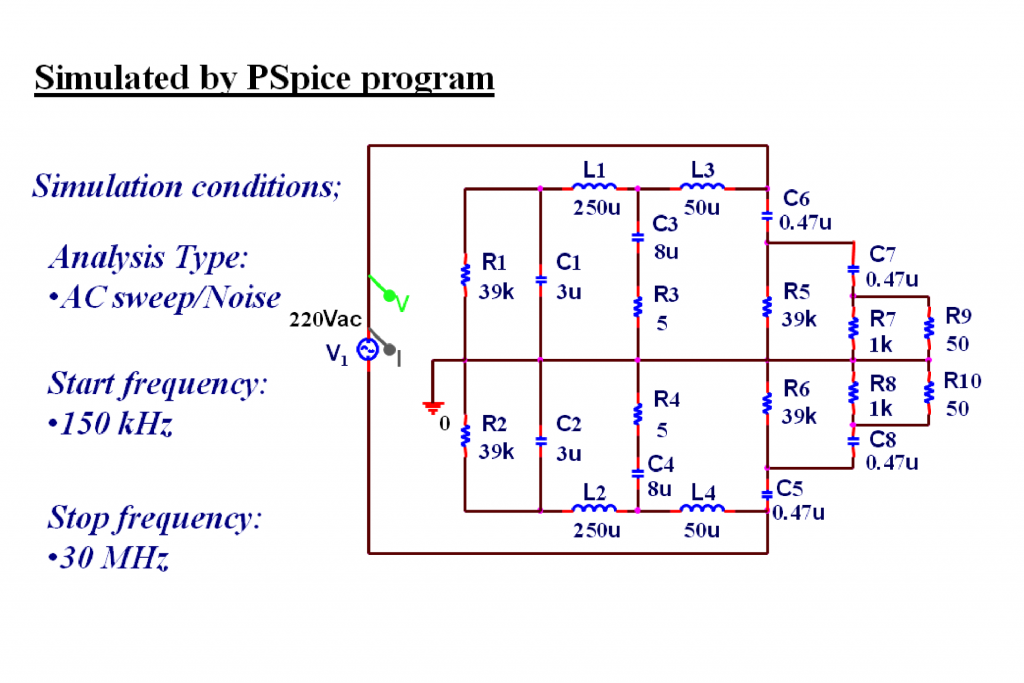
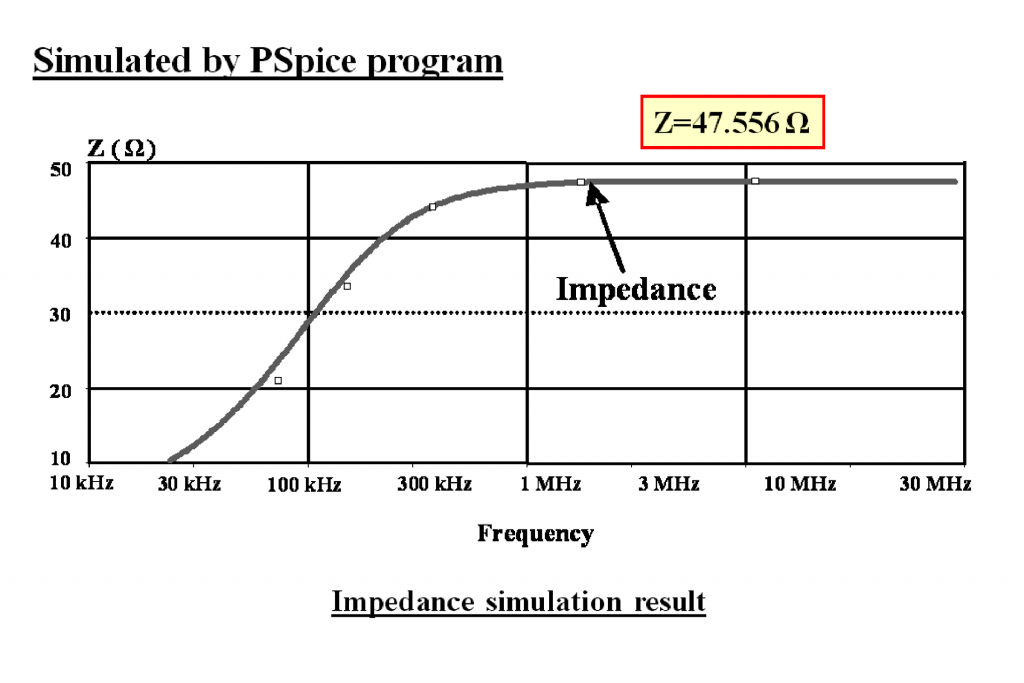
รูปที่ 6 (ก) ตัวอย่างวงจรโครงข่ายสร้างเสถียรภาพอิมพีแดนซ์ยี่ห้อ EMCO รุ่น 3810-2 [www.ets-lindgren.com] (ข) อิมพีแดนซ์ของ V-network 50 Ω/50 μH+5 Ω กำหนดโดย CISPR 16 [2] (ค) รูปวงจรจำลองด้วยโปรแกรม PSpice (ง) ผลการจำลอง [10]
สำหรับ LISN ที่นิยมใช้ในเชิงพาณิชย์อย่างแพร่หลายจะได้แก่รูปแบบ V-network สำหรับตัวอย่าง V-network ซึ่งสามารถใช้วัดความถี่ได้ตั้งแต่ 9 kHz – 30 MHz ดังแสดงโครงสร้างภายในในรูปที่ 5 และวงจรในรูปที่ 6 เป็นต้น
(ก)
(ข)
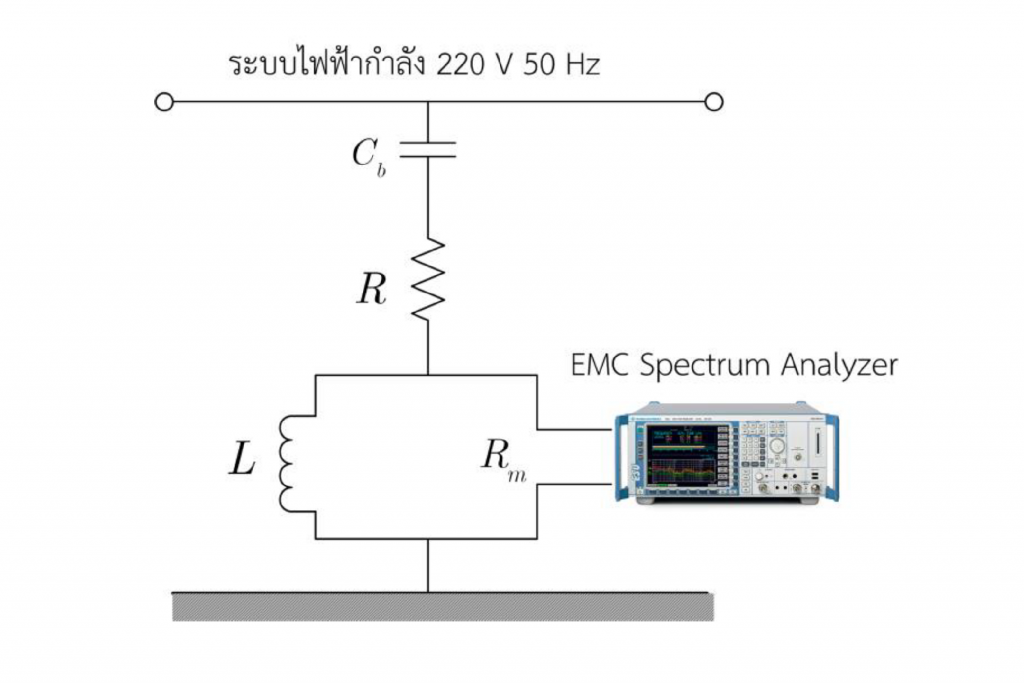
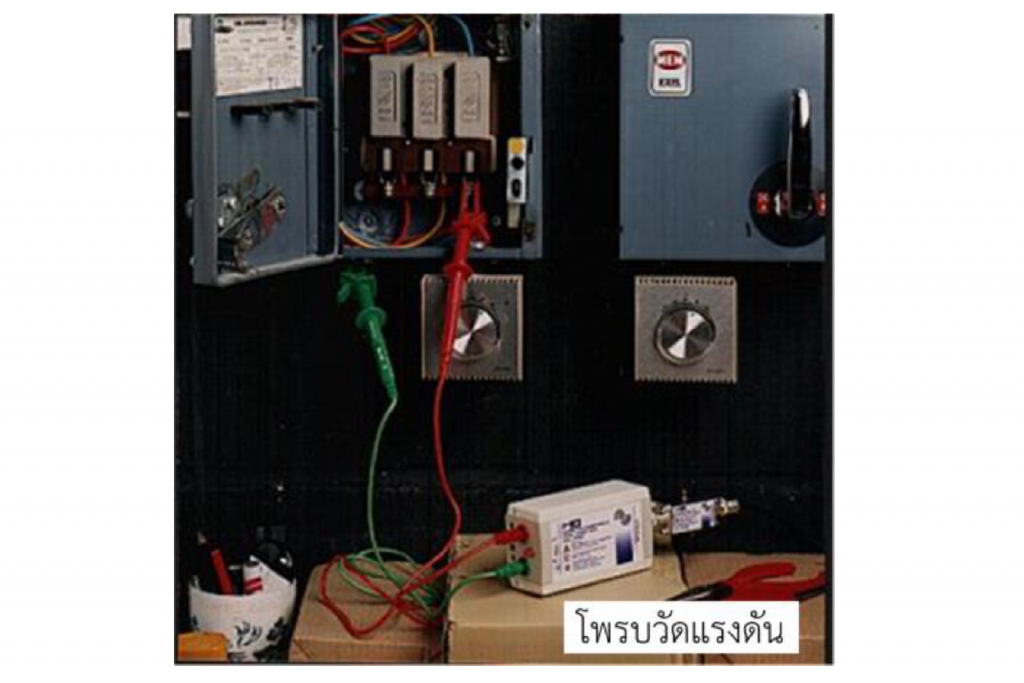
รูปที่ 7 (ก) วงจรสมมูลของโพรบแรงดัน (R + Rm = 1500W ; XCbXL>>Rm) (ข) ตัวอย่างการวัดจริง [ที่มา: www.compliance-club.com]
โพรบแรงดัน
โพรบแรงดัน (voltage probe) เป็นเครื่องมือวัดอีกชนิดหนึ่งที่สามารถนำมาใช้ในการวัดสัญญาณรบกวนแม่เหล็กไฟฟ้าทางสายตัวนำได้ ซึ่งอ้างอิงตาม CISPR 16-1 ได้ระบุว่าสามารถใช้ในการวัดสัญญาณรบกวนแม่เหล็กไฟฟ้าทางสายตัวนำได้เช่นกัน สำหรับวงจรสมมูลของโพรบแรงดันแสดงไว้ในรูปที่ 7 โดยที่ค่าความต้านทาน จะต้องเป็นไปตามความสัมพันธ์ในสมการ
R + Rm = 1500Ω (3)
โดยที่ Rm คืออินพุตอิมพีแดนซ์ของเครื่องมือวิเคราะห์สัญญาณ (EMC Spectrum Analyzer) ดังนั้น ค่าแรงดันของสัญญาณรบกวนแม่เหล็กไฟฟ้าทางสายตัวนำ (VEMI) จะมีสัมพันธ์กับแรงดันที่วัดได้ที่เครื่องมือวิเคราะห์สัญญาณ (UEMI) เท่ากับ
VEMI = (1500 / Rm) × UEMI (4)
อย่างไรก็ตาม ในการวัดสัญญาณรบกวนแม่เหล็กไฟฟ้าทางสายตัวนำด้วยการใช้โพรบวัดแรงดันแทนที่จะใช้ LISN จะสามารถกระทำได้ก็ต่อเมื่อกระแสของบริภัณฑ์ทดสอบหรือขนาดของกระแสของระบบที่ทำการวัดมีค่าสูงเกินกว่าพิกัดของ LISN หรือการทดสอบไม่สามารถกระทำการติดตั้งในรูปแบบตามที่มาตรฐานกำหนดได้ (ในหัวข้อที่ 5) นอกจากนั้น การวัดด้วยการใช้โพรบแรงดันควรจะต้องแน่ใจว่าขนาดของสัญญาณรบกวนรบกวนแม่เหล็กไฟฟ้าทางสายตัวนำที่อยู่ในระบบไฟฟ้ากำลังจะต้องน้อยกว่าขนาดของสัญญาณรบกวนรบกวนแม่เหล็กไฟฟ้าทางสายตัวนำที่เกิดจากบริภัณฑ์ทดสอบอย่างน้อยไม่ต่ำกว่า 20dB
การวัดสัญญาณรบกวนรบกวนแม่เหล็กไฟฟ้าทางสายตัวนำด้วยการใช้โพรบวัดแรงดันจะทำการวัดระหว่างสายตัวนำใดๆ ที่ต้องการ เช่น วัดสายไลน์ทียบกับกราวด์ เป็นต้น นอกจากนั้น ข้อเสียหลักของการใช้โพรบวัดแรงดัน คือ ความแตกต่างระหว่างอิมพีแดนซ์ของโพรบแรงดันกับระบบไฟฟ้ากำลัง หรือระหว่างอิมพีแดนซ์ของโพรบแรงดันกับบริภัณฑ์ทดสอบ เป็นต้น ซึ่งผลความแตกต่างของอิมพีแดนซ์ดังกล่าวนี้เองจะทำให้เกิดความคลาดเคลื่อนของผลการทดสอบ และเพื่อป้องกันการเสียหายของอุปกรณ์ภายในโพรบ ตัวเก็บประจุ Class Y (Cb) ได้ถูกนำมาต่อไว้เพื่อความปลอดภัย นอกจากนั้นเพื่อป้องกันไฟฟ้าดูดสายโพรบจะมีการหุ้มฉนวนอย่างดี ดังแสดงในรูปที่ 7 (ข)
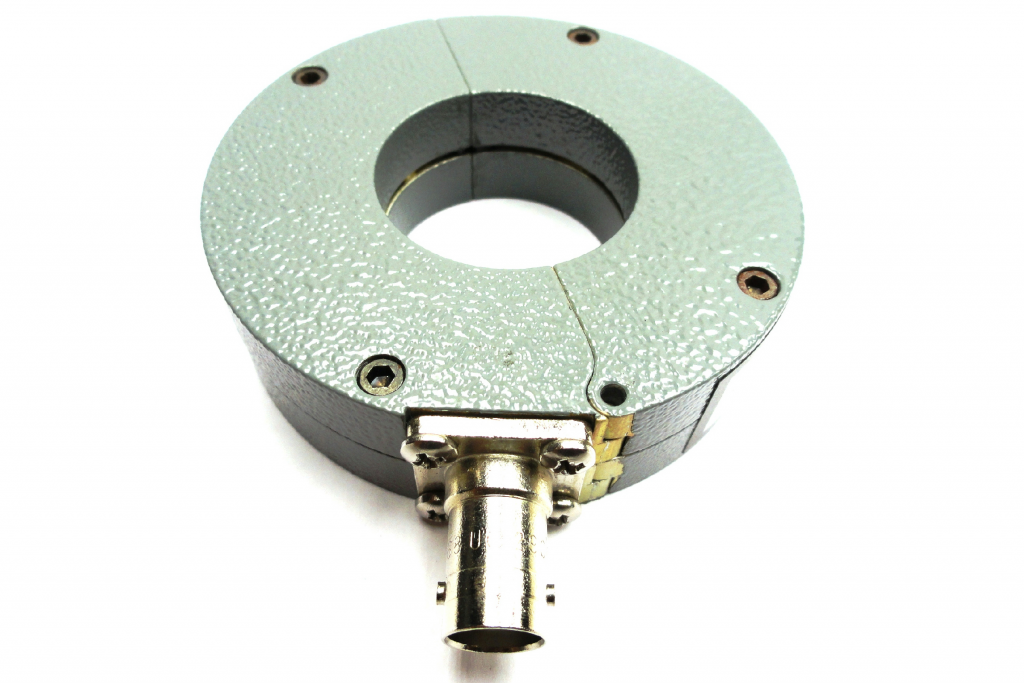

รูปที่ 8 รูปตัวอย่างโพรบกระแส [ที่มา: http://www.maximinstruments.com/]
โพรบกระแส
โพรบกระแส ดังแสดงในรูปที่ 8 จะเป็นเครื่องมือวัดที่ใช้สำหรับการวัดกระแสของสัญญาณรบกวนแม่เหล็กไฟฟ้าทางสายตัวนำ ซึ่งโพรบวัดกระแสจะเป็นเครื่องมือที่สามารถใช้ในการแยกวัดเฉพาะสัญญาณรบกวนโมดผลร่วมหรือโมดผลต่างได้ โดยหากต้องการวัดสัญญาณรบกวนแม่เหล็กไฟฟ้าทางสายตัวนำที่เกิดขึ้นที่สายใดก็ให้คล้องโพรบวัดกระแสเข้ากับตัวนำนั้น และเนื่องจากภายในสายไลน์และสายนิวทรัลจะมีองค์ประกอบของทั้งกระแสในโมดผลร่วมและโมดผลต่างอยู่ ดังนั้นหากคล้องเฉพาะสายไลน์ใดสายหนึ่งค่าที่วัดได้จะมีองค์ประกอบของทั้งกระแสโมดผลร่วมและโมดผลต่าง แต่หากคล้องทุกสายร่วมกัน (คล้องสายเคเบิลที่มีสายไลน์ นิวทรัลและกราวด์อยู่ภายใน) ค่าที่วัดได้จะเป็นองค์ประกอบของกระแสโมดผลร่วมเท่านั้น นอกจากนั้นโดยส่วนใหญ่ ตำแหน่งการวัดของโพรบกระแสจะวัดอยู่ระหว่างบริภัณฑ์ทดสอบและ LISN โดยตำแหน่งการวัดควรจะใกล้กับ LISN มากที่สุดเท่าที่จะทำได้ อย่างไรก็ตาม การคล้องโพรบกระแสเข้ากับระบบจะทำให้อิมพีแดนซ์ของระบบเพิ่มขึ้น (ประมาณน้อยกว่า 0.5 โอห์ม) และสามารถใช้วัดกระแสได้ถึงความถี่ประมาณ 50 MHz เท่านั้น
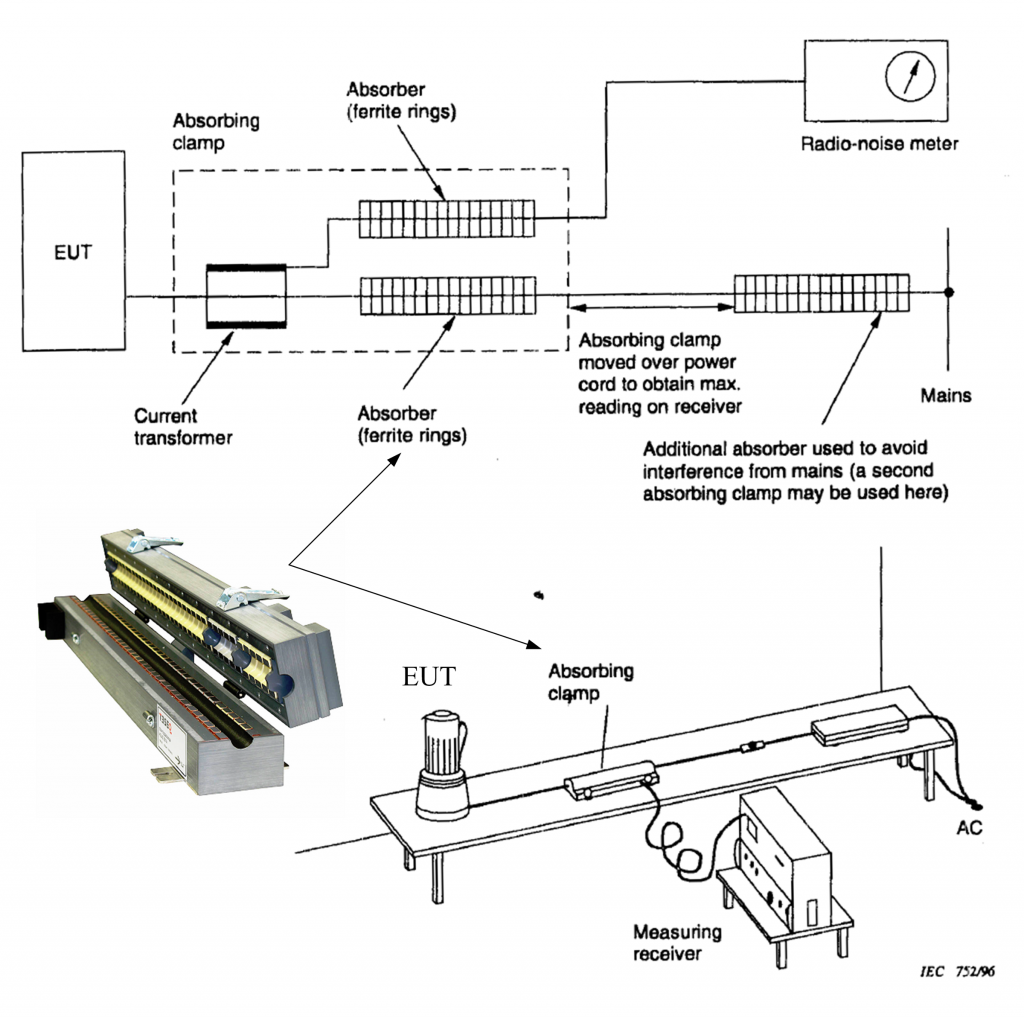
รูปที่ 9 อุปกรณ์ที่ใช้ในการวัดสัญญาณรบกวนแม่เหล็กไฟฟ้าทางสายตัวนำที่ความถี่ 30 MHz – 300 MHz [4]
โพรบกำลัง
โพรบกำลัง (power probe) หรือเรียกอีกชื่อหนึ่งว่า absorbing clamp หรือ ferrite clamp ใช้สำหรับการวัดสัญญาณรบกวนแม่เหล็กไฟฟ้าทางสายตัวนำในย่านความถี่ 30MHz – 300MHz กล่าวอีกนัยหนึ่งคือ ใช้ในการวัดสัญญาณรบกวนแม่เหล็กไฟฟ้าผ่านอากาศที่เกิดจากสายเคเบิลนั่นเอง ซึ่งการติดตั้งโพรบกำลังเพื่อวัดสัญญาณรบกวนแม่เหล็กไฟฟ้าทางสายตัวนำที่ความถี่ 30MHz – 300MHz ตามมาตรฐาน CISPR 16 ได้แสดงในรูปที่ 9 และหน่วยที่วัดได้คือ dBpW โดยข้อดีของการใช้โพรบกำลังคือ ไม่ต้องทำการทดสอบในห้องทดสอบแบบเปิดโล่ง (open area test site) อย่างไรก็ตาม การทดสอบควรกระทำในห้องชีลด์ สำหรับมาตรฐานที่ระบุให้ใช้โพรบกำลังดังกล่าวนี้จะได้แก่ EN55013, EN55014 และ EN55020
เครื่องวิเคราะห์สัญญาณสำหรับงานด้านความเข้ากันได้ทางแม่เหล็กไฟฟ้า
(EMC Spectrum Analyzer)
เครื่องวิเคราะห์สัญญาณก็คือเครื่องมือวัดที่ใช้สำหรับแสดงขนาดของสเปกตรัมของสัญญาณเป็นคาบใดๆ โดยหลักการทำงานพื้นฐานแล้วเครื่องวิเคราะห์สัญญาณก็คือเครื่องรับวิทยุ [กล่าวโดยเฉพาะเจาะจงคือเครื่องรับวิทยุแบบซูเปอร์เฮทเทอโรดายน์ (superheterodyne receiver)] ที่มีวงจรกรองแบบแถบความถี่ผ่านที่มีฟังก์ชันการกวาดความถี่
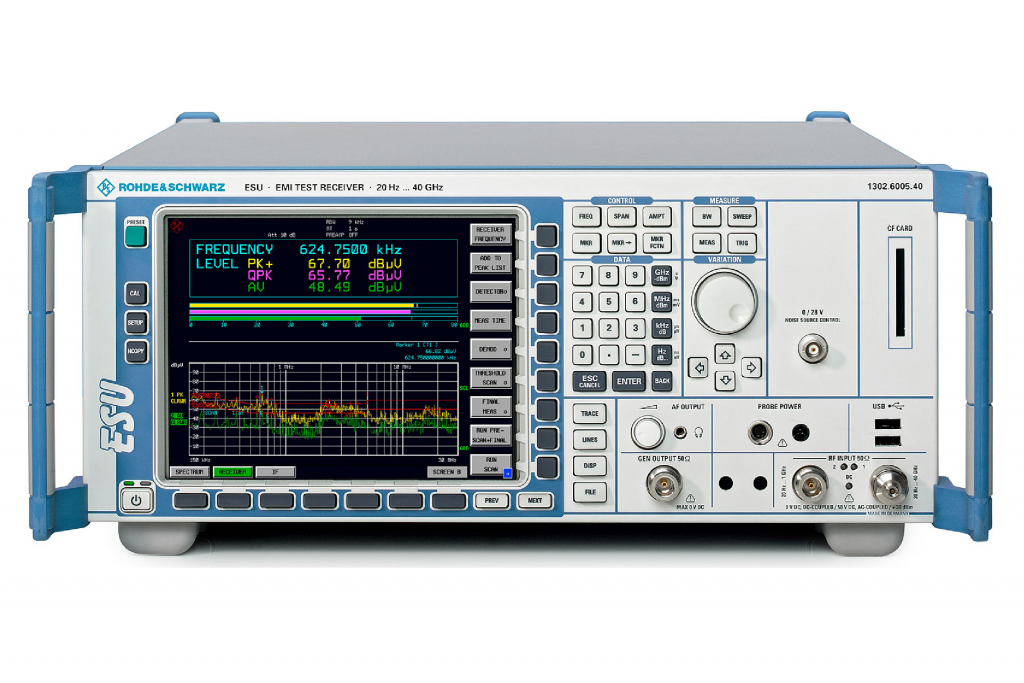
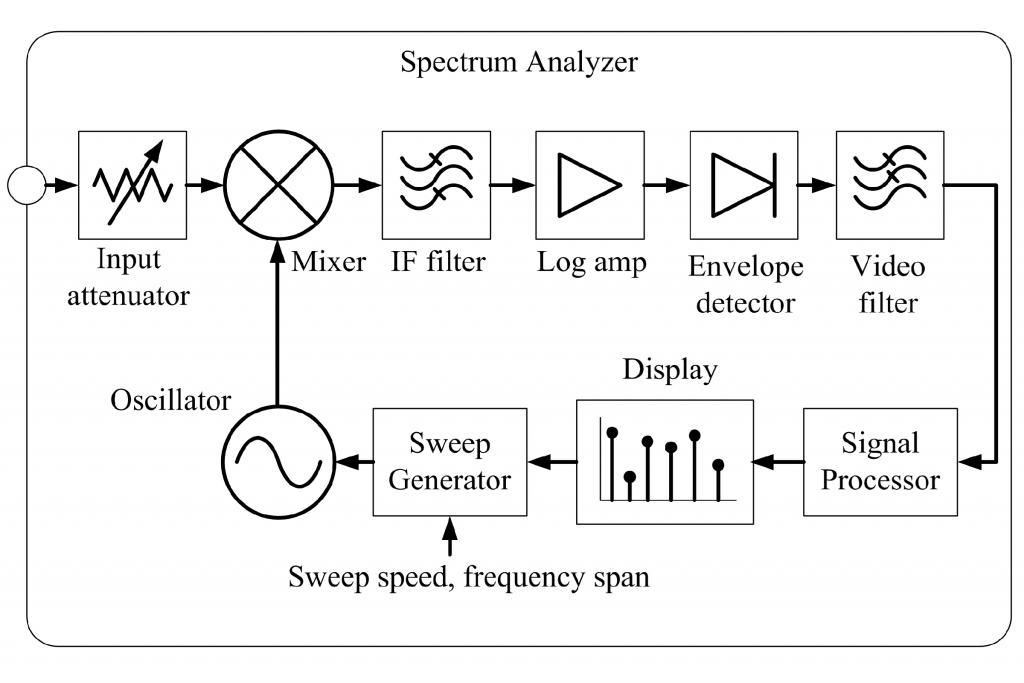
สำหรับตัวอย่างของเครื่องวิเคราะห์สัญญาณที่ใช้ในงานด้านความเข้ากันได้ทางแม่เหล็กไฟฟ้าได้แสดงไว้ในรูปที่ 10(ก) โดยภายในเครื่องวิเคราะห์สัญญาณพื้นฐานสามารถอธิบายด้วยบล็อกไดอะแกรมแสดงการทำงานดังแสดงในรูปที่ 10(ข) ซึ่งสัญญาณที่ทำการตรวจวัดหรือสัญญาณอินพุตจะป้อนเข้าสู่ตัวลดทอน (attenuator) จากนั้นผ่านไปสู่วงจรมิกเซอร์ (mixer) เพื่อรวมกับสัญญาณที่ได้จากวงจรออสซิลเลเตอร์ และเนื่องจากวงจรมิกเซอร์มีคุณลักษณะไม่เชิงเส้น ดังนั้นเอาต์พุตที่ได้จะประกอบไปด้วยสัญญาณอินพุตรวมกับจากออสซิลเตอร์และฮาร์มอนิกด้วยเช่นกัน และสัญญาณที่ผ่านวงจรมิกเซอร์จะผ่านไปยังวงจร IF filter (Intermediate-frequency filter) โดยสัญญาณดังกล่าวหากอยู่ภายในย่านยอมให้ผ่าน (bandpass) ของ IF filter ก็จะผ่านไปยังเอ็นเวลโลปดีเทกเตอร์ (envelope detector) หรือ ไดโอดดีเทกเตอร์ (diode detector) เพื่อทำการเรียงกระแส (rectified) จากนั้นก็จะผ่านวงจรกรองความถี่ต่ำผ่านและแสดงผลออกทางหน้าจอของเครื่องวิเคราะห์สัญญาณ [อย่างไรก็ตาม ในปัจจุบันเครื่องวิเคราะห์สัญญาณจะมีฟังก์ชันการทำงานที่หลากหลายและซับซ้อนกว่านี้มากแต่โดยหลักการแล้วก็จะคล้ายกัน]
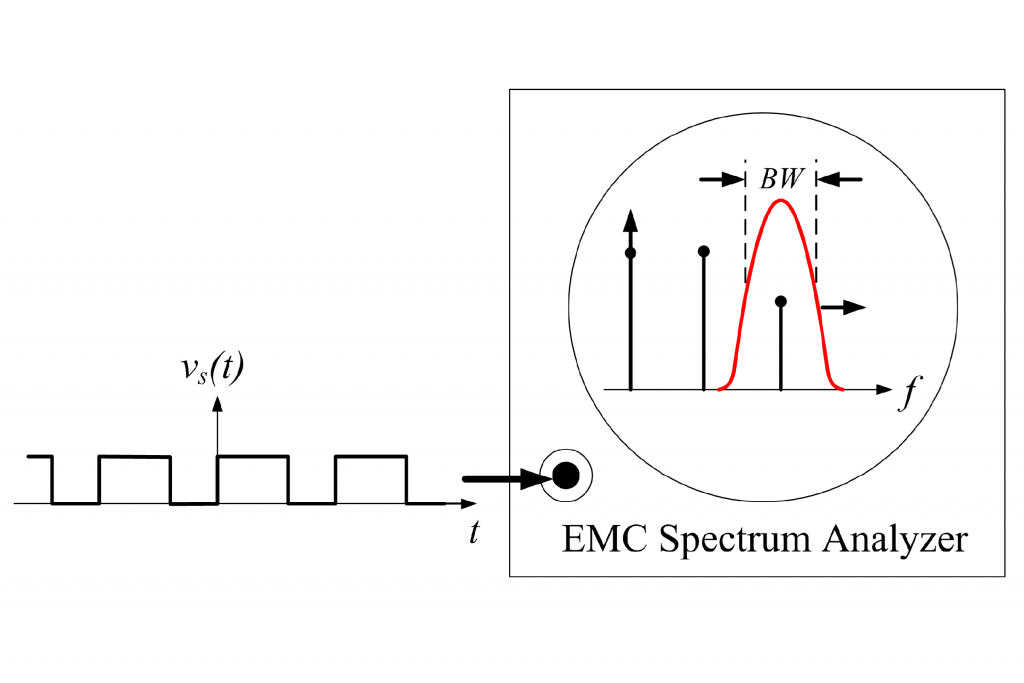
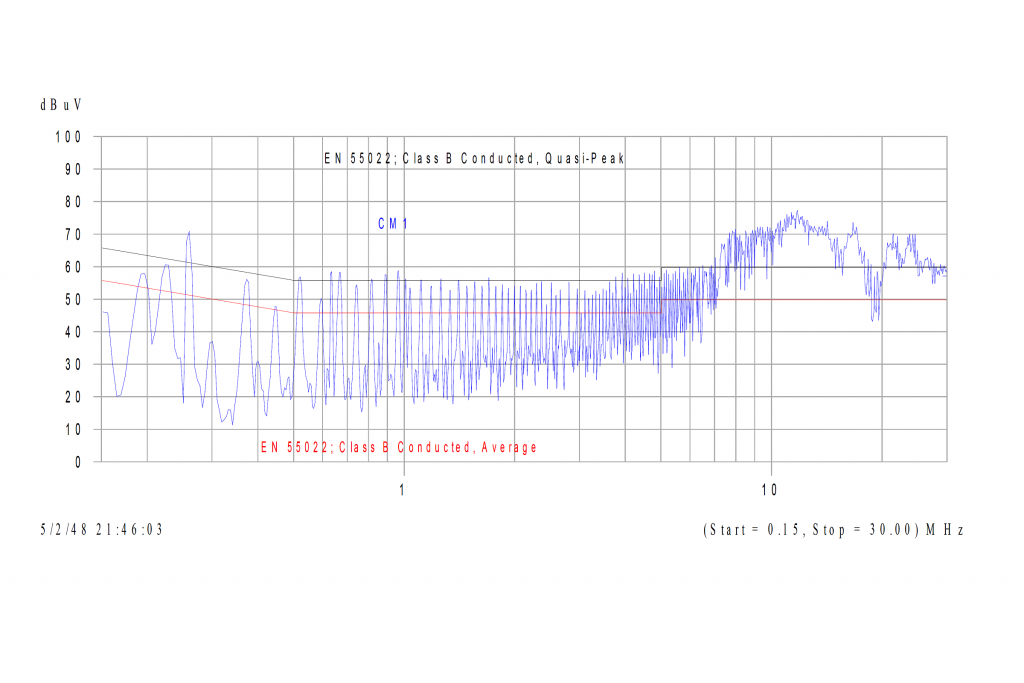
โดยรูปที่ 10 (ค) แสดงการทำงานของ IF filter ซึ่งก็คือวงจรกรองแบบแถบความถี่ผ่าน (bandpass filter) ที่ซึ่งความถี่กึ่งกลางของวงจรกรองจะทำการกวาดความถี่จากตำแหน่งเริ่มต้นไปยังตำแหน่งสิ้นสุด (กำหนดโดยผู้ใช้) ตลอดเวลาอย่างต่อเนื่อง โดยเครื่องมือวิเคราะห์สัญญาณจะแสดงผลสเปกตรัมของสัญญาณที่ทำการตรวจวัด (สัญญาณอินพุต) เฉพาะสเปกตรัมที่อยู่ภายในแบนด์วิดธ์ของวงจรกรองแบบแถบความถี่ผ่าน (กำหนดโดยผู้ใช้) ณ ตำแหน่งเวลาและจุดที่ความถี่กึ่งกลางของวงจรกรองกวาดไปถึงเท่านั้น สำหรับตัวอย่างผลการวัดสัญญาณรบกวนแม่เหล็กไฟฟ้าที่เกิดจากสวิตชิ่งเพาเวอร์ซัพพลายด้วยการใช้เครื่องมือวิเคราะห์สัญญาณสำหรับงานด้านความเข้ากันได้ทางแม่เหล็กไฟฟ้าได้แสดงไว้ในรูปที่ 11 (ค)
(ก)
(ข)
(ค)
รูปที่ 10 เครื่องวิเคราะห์สัญญาณ (ก) ตัวอย่าง EMC Spectrum Analyzer ยี่ห้อ Rohde & Schwarz (ข) บล็อกไดอะแกรมแสดงการทำงานขั้นพื้นฐาน (ค) ฟังก์ชันการกวาดความถี่ของวงจรกรองแบบแถบความถี่ผ่าน
หลักการทำงานพื้นฐานของเครื่องวิเคราะห์สัญญาณ
โดยทั่วไป ขนาดของสเปกตรัมของสัญญาณที่ทำการตรวจวัดโดยเครื่องมือวิเคราะห์สัญญาณจะขึ้นอยู่กับการเลือกใช้แบนด์วิดธ์ของเครื่องมือวิเคราะห์สัญญาณและการเลือกโมดการทำงานของไดโอดดีเทคเตอร์หรือตัวตรวจรับตรวจหา (detector receiver) โดยในหัวข้อนี้จะกล่าวถึง ผลของการเลือกใช้แบนด์วิดธ์ของเครื่องมือวิเคราะห์สัญญาณ
หากพิจาณาผลกระทบที่เกิดจากการกวาดความถี่ของวงจรกรองแบบแถบความถี่ผ่านที่ส่งผลต่อสเปกตรัมที่แสดงบนจอของเครื่องวิเคราะห์สัญญาณ การพิจารณาดังกล่าวนี้มีความสำคัญเป็นอย่างมากซึ่งสามารถส่งผลกระทบต่อผลการทดสอบสัญญาณรบกวนแม่เหล็กไฟฟ้าทั้งทางสายตัวนำและทางอากาศของผลิตภัณฑ์ว่าจะสามารถผ่านมาตรฐานที่กำหนดได้หรือไม่ ซึ่งหากสัญญาณรบกวนที่ตรวจวัดได้มีค่าสูงเกินกว่าเส้นขีดจำกัด (limit line) ก็จะส่งผลทำให้ผลิตภัณฑ์ดังกล่าวไม่ผ่านการทดสอบโดยทันที ดังแสดงตัวอย่างในรูปที่ 11 (ค) ซึ่งจะเห็นได้ว่าผลการทดสอบที่วัดได้สูงเกินกว่าเส้นขีดจำกัดที่หลายความถี่ด้วยกัน เช่น ที่ความถี่ 260kHz โดยเฉพาะอย่างยิ่งที่ความถี่สูงเกินกว่า 7MHz - 30MHz เป็นต้น และในกรณีดังกล่าวนี้ สวิตชิ่งเพาเวอร์ซัพพลายที่ทำการตรวจวัดจะไม่สามารถผ่านมาตรฐานที่กำหนดได้นั่นเอง โดยหลักการสำคัญที่ส่งผลต่อขนาดของสเปกตรัมที่ตรวจวัดจะได้แก่การเลือกแบนด์วิดธ์ (bandwidth: BW) ของวงจรกรองแถบความถี่ผ่านที่อยู่ภายในเครื่องวิเคราะห์สัญญาณนั่นเอง (กำหนดโดยผู้ใช้) ซึ่งสามารถอธิบายได้ดังรูปที่ 11(ก) และ 11(ข)
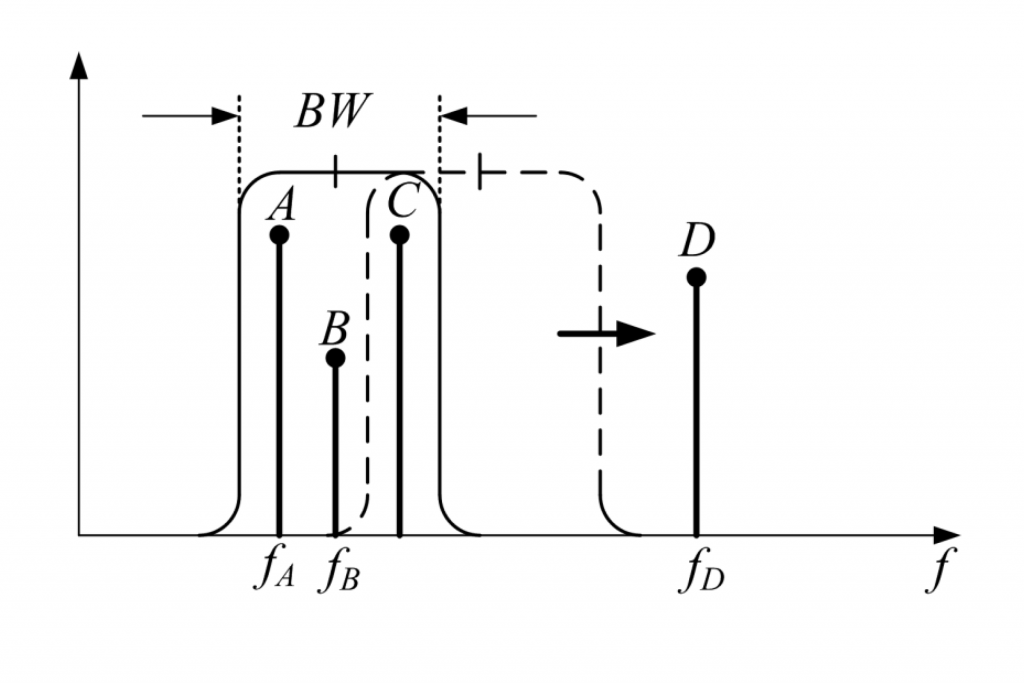
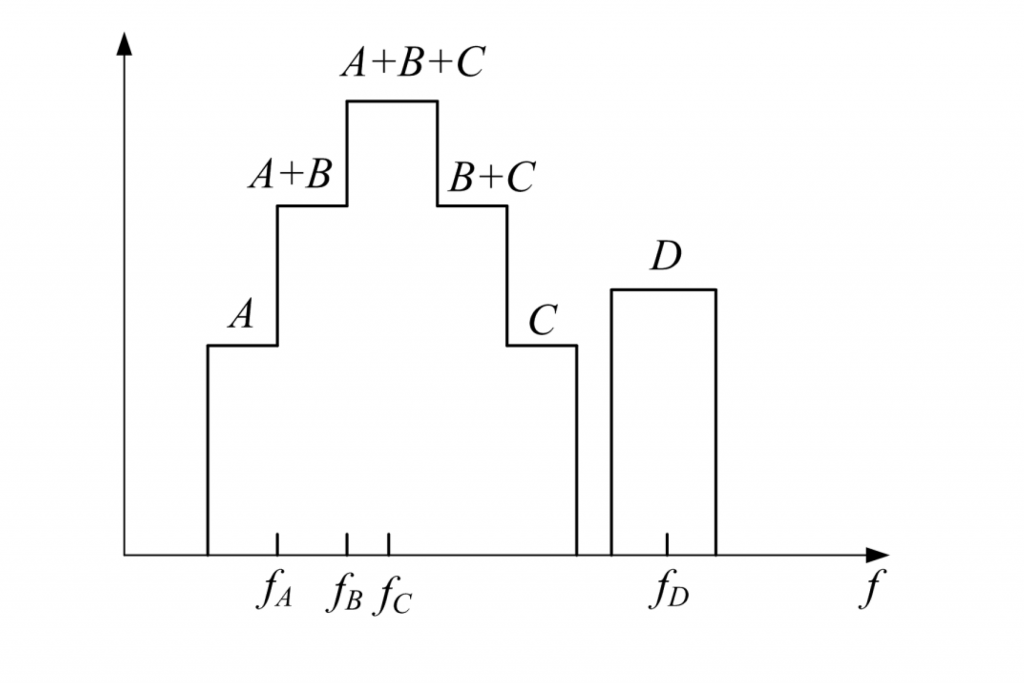
หากทำการเลือกแบนด์วิดธ์ของเครื่องมือวิเคราะห์สัญญาณเท่ากับ 6dB ซึ่งก็คือแถบย่านความถี่ โดยแถบย่านความถี่ดังกล่าวนี้จะเป็นย่านความถี่ที่วัดต่ำกว่าค่าสูงสุดลงมา 6dB ณ ตำแหน่งความถี่กึ่งกลาง และเนื่องจากวงจรกรองแบบแถบความถี่ผ่านที่อยู่ภายในเครื่องวิเคราะห์สัญญาณจะมีทำงานด้วยการกวาดความถี่ตลอดเวลาอย่างต่อเนื่อง อย่างไรก็ตาม เพื่อให้ง่ายต่อการอธิบายจะสมมุติให้การกวาดความถี่หยุดไว้ที่ ณ ตำแหน่งใดตำแหน่งหนึ่งเท่านั้น สมมุติต่อไปว่ามีฮาร์มอนิกสามอันดับ ได้แก่ A, B และ C อยู่ภายในแบนด์วิดธ์ของวงจรกรอง ณ จุดที่ทำการกวาดความถี่ไปถึง ดังนั้น ค่าที่แสดงผลออกมาบนจอของเครื่องมือวิเคราะห์สัญญาณจะเท่ากับผลรวมของฮาร์มอนิก A, B และ C หรือ A + B + C นั่นเอง และเมื่อความถี่ในการกวาดเลื่อนออกไปเรื่อยๆทางขวามือตามแนวแกนความถี่ ฮาร์มอนิก A จะหลุดออกไปจากแบนด์วิดธ์ของวงจรกรอง ดังนั้นผลที่แสดงออกมาบนจอมอนิเตอร์ของเครื่องมือวิเคราะห์สัญญาณจะเท่ากับ B + C และเมื่อความถี่ในการกวาดเลื่อนออกไปอีก ฮาร์มอนิก B ก็จะหลุดออกไปจากแบนด์วิดธ์ของวงจรกรองเช่นกัน ทำให้ผลที่แสดงออกมาบนจอของเครื่องมือวิเคราะห์สัญญาณจะเท่ากับขนาดของฮาร์มอนิก C เท่านั้น ดังแสดงในรูปที่ 11 (ข)
(ก)
(ข)
(ค)
ตารางที่ 1 ข้อกำหนดของ FCC เกี่ยวกับแบนด์วิดธ์ต่ำสุดของเครื่องมือวิเคราะห์สัญญาณ (6 dB)

ตารางที่ 2 ข้อกำหนดของ CISPR 22 เกี่ยวกับแบนด์วิดธ์ต่ำสุดของเครื่องมือวิเคราะห์สัญญาณ (6 dB)

ดังที่ได้อธิบายหลักการทำงานของเครื่องมือวิเคราะห์สัญญาณจะสามารถสรุปได้ว่า หากต้องการให้ค่าที่ตรวจวัดได้มีค่าน้อยที่สุดเท่าที่จะทำได้ (เพื่อให้ผ่านมาตรฐานได้ง่ายขึ้น) วิธีที่ง่ายที่สุดคือเลือกแบนด์วิดธ์ให้มีค่าต่ำที่สุดเท่าที่จะทำได้นั่นเอง อย่างไรก็ตาม คณะกรรมการผู้ร่างมาตรฐานต่างก็ทราบถึงจุดอ่อนนี้ดีจึงได้กำหนดแบนด์วิดธ์ต่ำสุดไว้ด้วยในมาตรฐานเช่นกัน (คงไม่มีใครเลือกใช้ค่าแบนด์วิดธ์ที่สูงกว่านี้เพราะจะทำให้ค่าที่วัดได้สูงขึ้น) เช่น ตามข้อกำหนดของ FCC และ CISPR 22 ดังแสดงในตารางที่ 1 และ 2 ซึ่งกำหนดค่าแบนด์วิดธ์ต่ำสุดไว้ที่ 6 dB ตามลำดับ ยกตัวอย่างเช่น สำหรับข้อกำหนดของ CISPR 22 ดังแสดงในตารางที่ 2 จะเห็นได้ว่าสำหรับการทดสอบสัญญาณรบกวนแม่เหล็กไฟฟ้าทางสายตัวนำ ย่านความถี่ที่ทำการตรวจวัดจะคลอบคลุมตั้งแต่ความถี่ 150kHz – 30MHz โดยสัญญาณที่ตรวจวัดได้ในย่านความถี่ดังกล่าวนี้จะต้องไม่เกินเส้นขีดจำกัดที่กำหนด และในการทดสอบจะต้องตั้งค่าแบนด์วิดธ์ของเครื่องวิเคราะห์สัญญาณให้มีค่าเท่ากับ 6dB หรือ 9kHz เป็นต้น
และเนื่องจากการผลที่แสดงบนหน้าจอของเครื่องวิเคราะห์สัญญาณก็คือผลรวมของสเปกตรัมที่อยู่ภายใต้แบนด์วิดธ์ทั้งหมด ณ ตำแหน่งตรงที่ความถี่กึ่งกลางของวงจรกรองแถบความถี่ผ่านทำการกวาดความถี่ผ่านไปถึง ดังนั้นในการออกแบบหรือการเลือกใช้ความถี่สวิตชิ่งหรือสัญญาณนาฬิกาต่างๆควรจะต้องออกแบบให้ฮาร์มอนิกของสัญญาณอยู่ห่างกันเกินกว่าค่าแบนด์วิดธ์ของวงจรกรองแถบความถี่ผ่านที่อยู่ภายในเครื่องวิเคราะห์สัญญาณนั่นเอง ยกตัวอย่างเช่น สมมุติมีการใช้วงจรสร้างสัญญาณนาฬิกา 2 วงจร (clock oscillators) โดยวงจรทั้งสองติดตั้งในตำแหน่งที่แตกต่างกันภายในผลิตภัณฑ์ที่ทำการออกแบบ และวงจรทั้งคู่ต่างก็ทำงานที่ความถี่สวิตชิ่ง 10MHz โดยที่การทำงานของวงจรดังกล่าวก็จะแผ่สัญญาณรบกวนแม่เหล็กไฟฟ้าผ่านทางอากาศออกจากตัวผลิตภัณฑ์ ดังนั้นผลการวัดสัญญาณรบกวนผ่านทางอากาศที่ตรวจวัดได้จากสายอากาศที่ต่อไปยังเครื่องมือวิเคราะห์สัญญาณก็คือผลรวมของสัญญาณรบกวนที่เกิดจากวงจรทั้งสองนั่นเอง
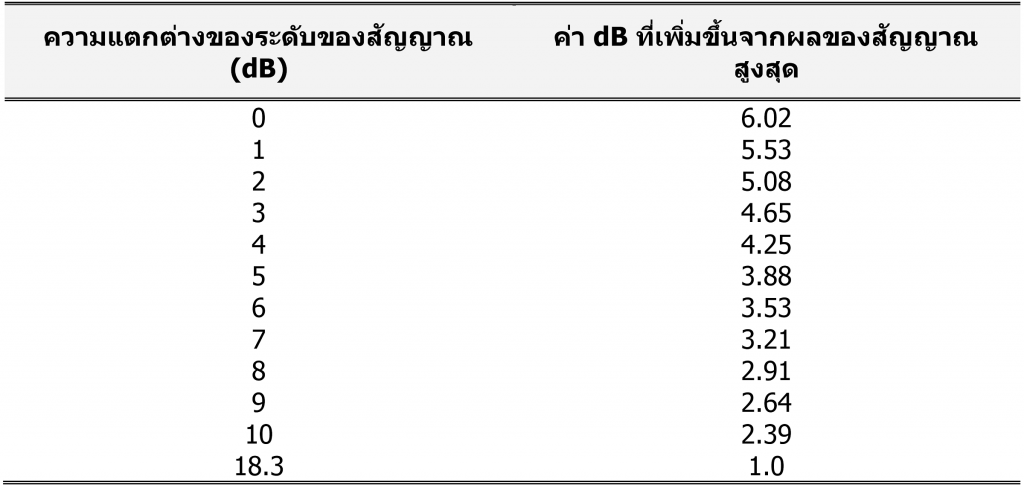
ตารางที่ 3 ผลกระทบที่เกิดจากการรวมกันของสัญญาณที่มีขนาดไม่เท่ากันจำนวน 2 สัญญาณ
และเนื่องจากวงจรสร้างสัญญาณนาฬิกาติดตั้งคนละตำแหน่งภายในผลิตภัณฑ์ ดังนั้นจะสมมุติว่าสัญญาณรบกวนผ่านทางอากาศที่ตรวจวัดได้เกิดจากการแผ่คลื่นแม่เหล็กไฟฟ้าจากสองจุดที่แตกต่างกันภายในผลิตภัณฑ์นั้นแต่มีความเข้มของสนามเท่ากัน โดยผลการตรวจวัดพบว่า ที่ความถี่ 10MHz, 20MHz และ 30MHz ค่าที่ตรวจวัดได้จะมีค่าสูงขึ้น 6dB เมื่อเทียบกับกรณีที่มีการใช้วงจรสร้างสัญญาณนาฬิกาเพียงวงจรเดียว ในการที่จะแก้ปัญหาดังกล่าวนี้ หากทำการเลือกความถี่ของวงจรสร้างสัญญาณนาฬิกาให้แตกต่างกัน เช่น 10MHz และ 15 MHz เป็นต้น จะพบว่า ปัญหายังคงจะเกิดขึ้นถึงแม้ว่าจะไม่มากเท่ากรณีใช้ความถี่สวิตชิ่งเดียวกันก็ตาม โดยสัญญาณรบกวนผ่านทางอากาศจะเกิดขึ้นที่ 10MHz, 15MHz, 20MHz, 30 MHz, ซึ่งจะเห็นได้ว่าฮาร์มอนิกที่เกิดขึ้นจะห่างกันเกินกว่าค่าแบนด์วิดธ์ต่ำสุดที่กำหนดโดยมาตรฐานสากลทั่วไป (120kHz) แต่หากพิจารณาให้ลึกลงไปจะพบว่า ฮาร์มอนิกอันดับที่ 9 ของความถี่สวิตชิ่ง 10MHz จะเท่ากับ 90MHz และฮาร์มอนิกอันดับที่ 6 ของความถี่สวิตชิ่ง 15 MHz จะเท่ากับ 90MHz เช่นกัน ดังนั้นจะส่งผลทำให้สัญญาณรบกวนผ่านทางอากาศที่ตรวจวัดได้จะมีค่าเพิ่มขึ้นอีก 6dB ได้เช่นกัน
ดังนั้นถึงแม้ว่าขนาดของฮาร์มอนิกที่เกิดจากทั้งสองวงจรที่อยู่ภายในแบนด์วิดธ์ของเครื่องมือวิเคราะห์สัญญาณจะมีค่าไม่เท่ากัน การแสดงผลบนหน้าจอของเครื่องมือวิเคราะห์สัญญาณจะมีค่าเพิ่มขึ้นในอัตราส่วนที่เป็นไปตามดังแสดงในตารางที่ 3 ซึ่งจะกำหนดให้สัญญาณทั้งสองอินเฟสกัน โดยผลลัพธ์ที่ได้เกิดจากการเปลี่ยนขนาดของสัญญาณไปเป็นค่าสมบูรณ์ (absolute) จากนั้นนำมารวมกันและเปลี่ยนให้อยู่ในรูป dB ซึ่งขั้นตอนดังกล่าวนี้จะเหมือนกับขั้นตอนการแสดงผลที่เกิดขึ้นภายในเครื่องมือวิเคราะห์สัญญาณนั่นเอง ในตารางที่ 3 จะสังเกตเห็นได้ว่า ถึงแม้ว่าขนาดของสัญญาณทั้งสองจะมีค่าแตกต่างกันมากถึง 10 dB แต่จะเห็นได้ว่าผลลัพธ์ที่ได้คือการเพิ่มขึ้น 2.39 dB มากกว่ากรณีผลลัพธ์ที่ได้ที่เกิดจากกรณีสัญญาณขนาดใหญ่เพียงสัญญาณเดียว
ดังการนั้น เพื่อให้ผลิตภัณฑ์ที่ออกแบบสามารถผ่านมาตรฐานความเข้ากันได้ทางแม่เหล็กไฟฟ้าที่กำหนดได้โดยง่าย ในการออกแบบวงจรอิเล็กทรอนิกส์ต่างๆ ควรจะต้องตรวจสอบให้แน่ใจว่าไม่มีจำนวนฮาร์มอนิกเกินกว่า 1 อยู่ภายใต้แบนด์วิดธ์ของเครื่องมือวิเคราะห์สัญญาณนั่นเอง สำหรับวิธีการตรวจสอบว่ามีฮาร์มอนิกมากกว่า 1 อยู่ภายใต้แบนด์วิดธ์ของเครื่องมือวิเคราะห์สัญญาณหรือไม่ สามารถกระทำได้โดยง่ายด้วยการเลือกค่าแบนด์วิดธ์ของเครื่องมือวิเคราะห์สัญญาณให้มีค่าเล็กลงให้ต่ำกว่าค่าต่ำสุดที่กำหนดโดย CISPR 22 หรือ FCC เช่น หากทำการลดแบนด์วิดธ์ของเครื่องมือวิเคราะห์สัญญาณให้เล็กลงจาก 120 kHz เป็น 30 kHz และพบว่าไม่มีการเปลี่ยนแปลงของขนาดของสเปกตรัมที่แสดงบนหน้าจอของเครื่องมือวิเคราะห์สัญญาณแต่อย่างใด ทำให้สามารถมั่นใจได้ว่าไม่มีจำนวนฮาร์มอนิกเกินกว่า 1 อยู่ภายใต้แบนด์วิดธ์ของเครื่องมือวิเคราะห์สัญญาณแน่หากเลือกค่าแบนด์วิดธ์ของสัญญาณเป็น 120kHz นั่นเอง
ค่าสูงสุด ค่ายอดเสมือน และค่าเฉลี่ย
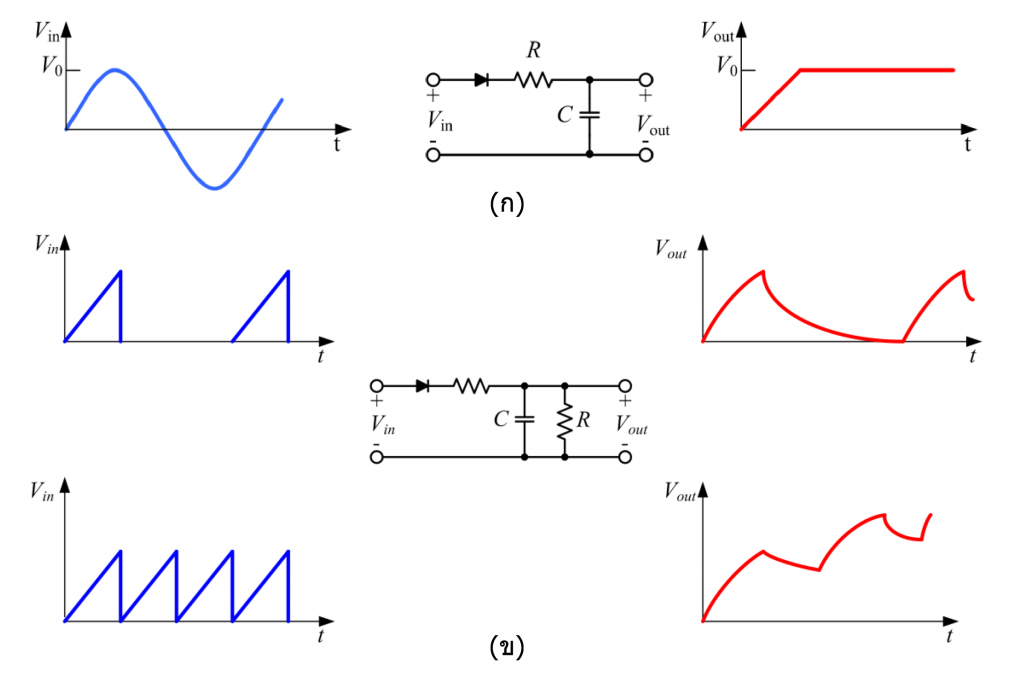
เนื่องจากโมดการทำงานของไดโอดดีเทกเตอร์หรือตัวตรวจรับตรวจหา (detector receiver) ที่อยู่ภายในเครื่องวิเคราะห์สัญญาณสามารถแบ่งออกได้เป็น การทำงานในโมดค่าสูงสุด (peak detector: P) ค่ายอดเสมือน (quasi-peak detector: QP) และ ค่าเฉลี่ย (average detector: AV) โดยในหัวข้อที่ผ่านมาได้สมมุติให้เครื่องวิเคราะห์สัญญาณทำงานในโมดค่าสูงสุดเท่านั้น ดังนั้นผลลัพธ์ที่แสดงบนจอของเครื่องวิเคราะห์สัญญาณจะแสดงเฉพาะค่าสูงสุด (อันที่จริงคือค่าอาร์เอ็มเอส) ของสเปกตรัมของสัญญาณ สำหรับการทำงานของไดโอดดีเทกเตอร์ในโมดค่าสูงสุดแสดงในรูปที่ 12 (ก) ซึ่งจะเห็นได้ว่าในโมดการทำงานดังกล่าวนี้ หากทำการป้อนสัญญาณไซน์ที่มีขนาดเท่ากับ V0 จะส่งผลทำให้เอาต์พุตที่ได้จากไดโอดดีเทคเตอร์จะมีค่าเท่ากับค่าสูงสุดเท่ากับ V0 เท่านั้น อย่างไรก็ตาม มาตรฐานหรือข้อกำหนดสากลทั่วโลกต่างก็ระบุให้โมดที่ทำการวัดของเครื่องมือวิเคราะห์สัญญาณจะต้องทำงานในโมดค่ายอดเสมือนเท่านั้น
โดยหลักการทำงานพื้นฐานของไดโอดดีเทกเตอร์ในโมดค่ายอดเสมือนแสดงในรูปที่ 12(ข) ซึ่งจะเห็นได้ว่ายิ่งสัญญาณอินพุต [ที่อยู่ในรูปสัญญาณสไปร์ก (spike)] เกิดขึ้นถี่มากเท่าใด ผลลัพธ์ที่ได้ก็จะยิ่งมีค่าสูงขึ้นเท่านั้น ซึ่งจะแตกต่างจากกรณีการทำงานในโมดค่าสูงสุด เพราะหากการเกิดขึ้นของสัญญาณที่ทำการตรวจวัดเกิดขึ้นไม่ถี่มากนักผลวัดที่ได้จากโมดค่ายอดเสมือนจะต่ำกว่ากรณีวัดด้วยโมดค่าสูงสุดมาก เป็นต้น
สำหรับเหตุผลที่ต้องบังคับให้ทำการตรวจวัดในโมดค่ายอดเสมือนนี้ก็เนื่องมาจากเหตุผลที่ว่า สัญญาณรบกวนที่เกิดขึ้นในเครื่องรับวิทยุหรือโทรทัศน์ก็ตาม หากสัญญาณรบกวนที่เกิดขึ้นอยู่ในรูปของสไปร์กที่เกิดขึ้นไม่ถี่มากนักก็จะไม่ส่งผลกระทบรบกวนต่อการรับฟังหรือการรับชมของผู้ใช้เครื่องใช้ไฟฟ้าและอิเล็กทรอนิกส์ดังกล่าวมากมายนัก อย่างไรก็ตาม หากสไปร์กดังกล่าวเกิดขึ้นอย่างต่อเนื่องและสม่ำเสมอก็จะส่งผลกระทบรบกวนต่อผู้ใช้เครื่องใช้ดังกล่าวได้
สำหรับการทำงานของไดโอดดีเทคเตอร์ในโมดค่าเฉลี่ยจะเพิ่มวงจรกรองความถี่ต่ำผ่าน (1 Hz) ต่อหลังจากวงจรไดโอดดีเทคเตอร์ในรูปแบบทั่วไป สำหรับเหตุผลที่ต้องมีการวัดในโมดค่าเฉลี่ยก็เพราะ บางครั้งปัญหาสัญญาณรบกวนที่เกิดจากระบบดิจิตอลจะอยู่ในรูปของสัญญาณรบกวนในแถบความถี่แคบๆ (narrowband emission) ที่อาจจะซ่อนอยู่และไม่อาจจะตรวจพบได้หากทำการวัดในโมดอื่นๆ เช่น ฮาร์มอนิกของสัญญาณนาฬิกาหรือสัญญาณรบกวนที่เกิดจากการอาร์กของคอมมิวเตเตอร์เนื่องจากการทำงานของดีซีมอเตอร์ เป็นต้น
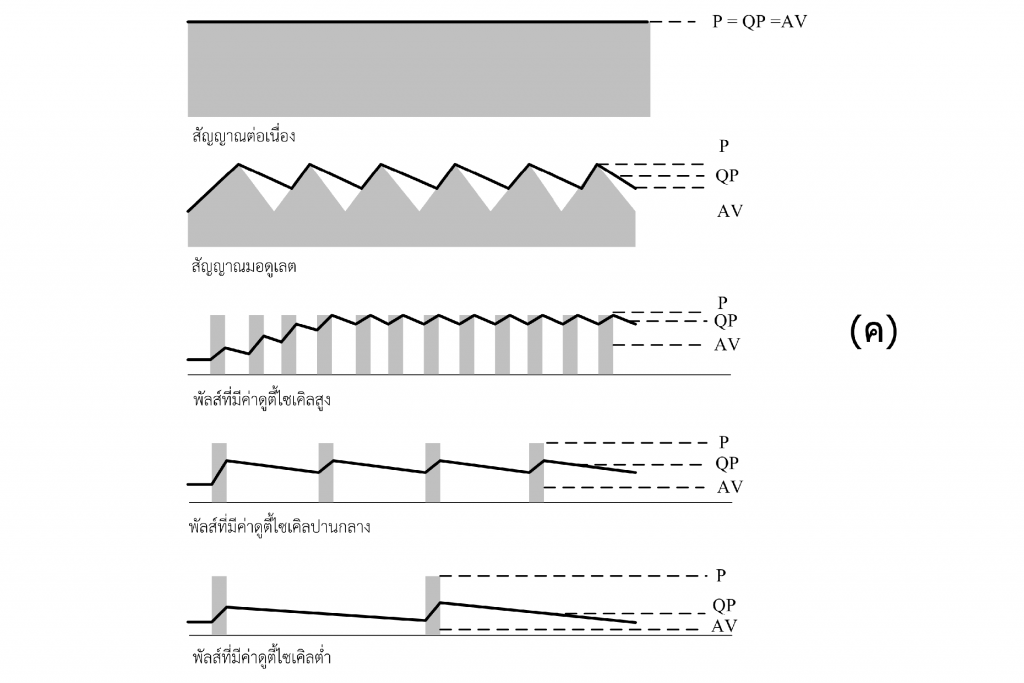
รูปที่ 12 (ก) ตัวตรวจจับค่าสูงสุด (ข) ตัวตรวจจับค่ายอดเสมือน (ค) เปรียบเทียบผลการวัดในโมดต่างๆ
อย่างไรก็ตาม การลดแบนด์วิดธ์ให้ต่ำลงมากๆก็จะให้ผลในทำนองเดียวกันกับการวัดในโมดค่าเฉลี่ย แต่ทั้งการลดแบนด์วิดธ์ให้ต่ำลงมากๆและการวัดในโมดค่าเฉลี่ยต่างก็สิ้นเปลืองเวลาเพราะใช้เวลาในการตรวจวัดนานมากทั้งสิ้น
สำหรับตัวอย่างการเปรียบเทียบผลการวัดสัญญาณรบกวนในรูปแบบต่างๆ โดยใช้โมดการวัดที่แตกต่างกันทั้งสามแบบได้แสดงไว้ในรูปที่ 12 (ค) ซึ่งจะเห็นได้ว่าหากเป็นกรณีสัญญาณต่อเนื่อง ค่าที่แสดงผลบนเครื่องวิเคราะห์สัญญาณเมื่อเลือกโมดการทำงานทั้งสามแบบจะให้ผลที่ไม่แตกต่างกันแต่อย่างใด อย่างไรก็ตาม หากตรวจวัดสัญญาณที่มีลักษณะเป็นพัลส์ที่มีลักษณะเป็นฟังก์ชันคาบ ยิ่งความถี่ในการเกิดพัลส์สูงขึ้นเท่าใด (ดูตี้ไซเคิลมีค่ามากขึ้น) ค่ายอดเสมือน (QP) จะยิ่งใกล้กับค่าสูงสุดมากขึ้นเท่านั้น (P) แต่ถ้าดูตี้ไซเคิลมีค่าน้อยลงจะเห็นได้ว่าค่ายอดเสมือนจะลดต่ำลงใกล้เคียงกับค่าเฉลี่ย (AV) มาก
กล่าวโดยสรุปคือ โดยทั่วไปการวัดในโมดค่าสูงสุด ผลลัพธ์ที่แสดงบนเครื่องวิเคราะห์สัญญาณจะมีค่าสูงที่สุดแต่จะมีค่าต่ำที่สุดหากทำการวัดในโมดค่าเฉลี่ย โดยผลลัพธ์ที่ได้จากการวัดในโมดค่ายอดเสมือนจะอยู่กึ่งกลางระหว่างค่าทั้งสองดังกล่าวนี้ซึ่งจะขึ้นอยู่กับค่าดูตี้ไซเคิลของพัลส์เป็นคาบที่ทำการตรวจวัด และหากดูตี้ไซเคิลมีค่าสูง ค่ายอดเสมือนที่ได้จะเลื่อนขึ้นไปหาค่าสูงสุดแต่จะมีค่าลดต่ำลงไปหาค่าเฉลี่ยหากดูตี้ไซเคิลมีค่าลดลงนั่นเอง ดังนั้นในการตรวจวัดสัญญาณรบกวนแม่เหล็กไฟฟ้าทั้งทางอากาศและทางสายตัวนำ ทั้ง FCC และ CISPR 22 นอกจากจะกำหนดค่าแบนด์วิดธ์ต่ำสุดแล้ว ยังกำหนดเส้นขีดจำกัด (limit line) สำหรับการตรวจวัดในโมดค่ายอดเสมือนและค่าเฉลี่ยอีกด้วย
ถึงแม้ว่าจะเป็นที่ทราบกันดีว่าสัญญาณรบกวนแม่เหล็กไฟฟ้าทางสายตัวนำระหว่างสายไลน์เทียบกับสายกราวด์และสายนิวทรัลเทียบกับสายกราวด์ (VLG และ VNG) จะประกอบด้วยผลรวมทางเวกเตอร์ระหว่างกระแสในโมดผลต่างและโมดผลร่วม และจะนิยมเรียกว่า สัญญาณรบกวนผลรวม (total noise) ซึ่งเส้นขีดจำกัดที่ระบุไว้ในมาตรฐานจะกำหนดสำหรับสัญญาณรบกวนผลรวมดังกล่าว โดยเส้นขีดจำกัดจะระบุในรูปของ dVmB และในรูปแบบของค่ายอดเสมือน (Quasi-Peak: QP) และค่าเฉลี่ย (Average: AV)
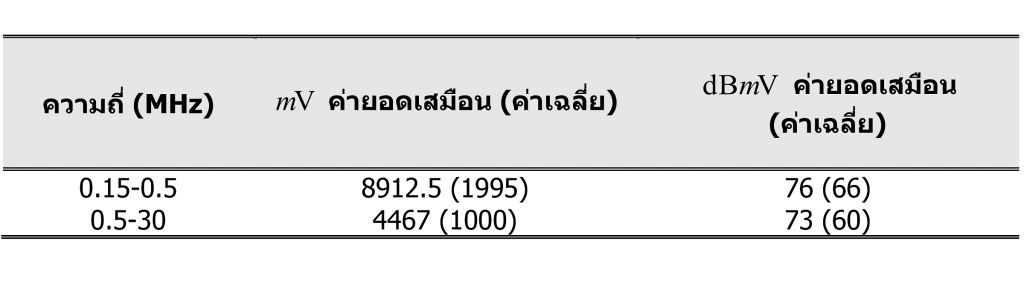
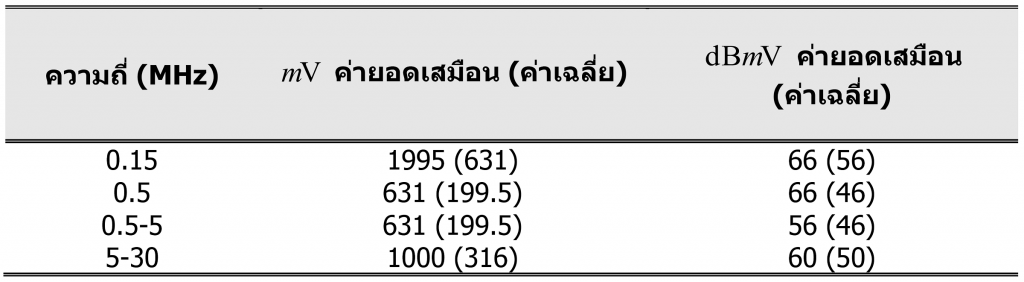
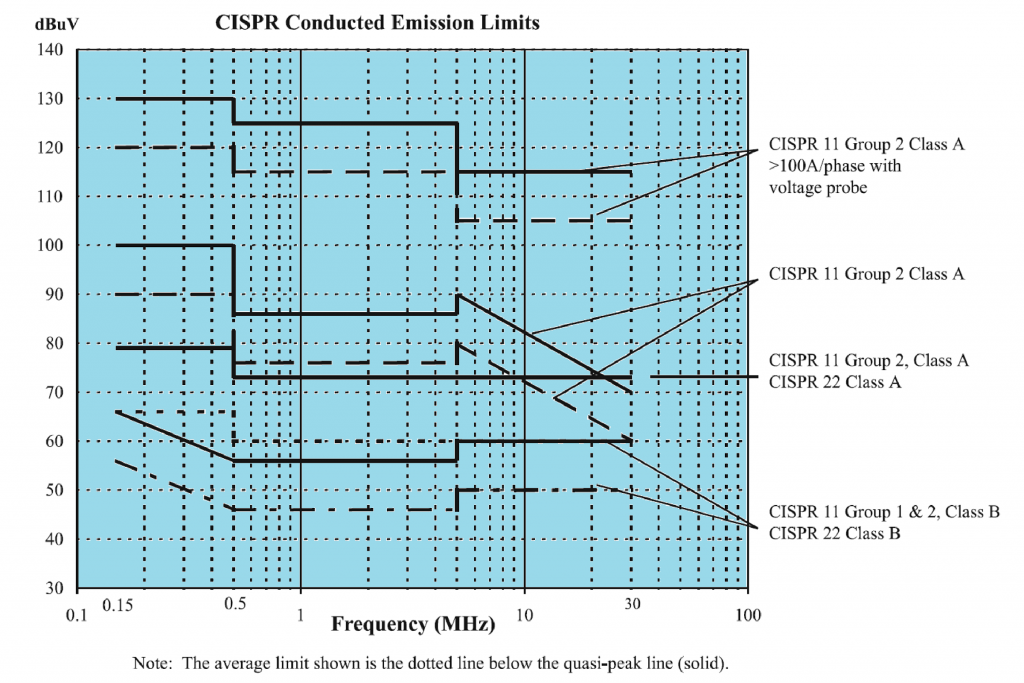
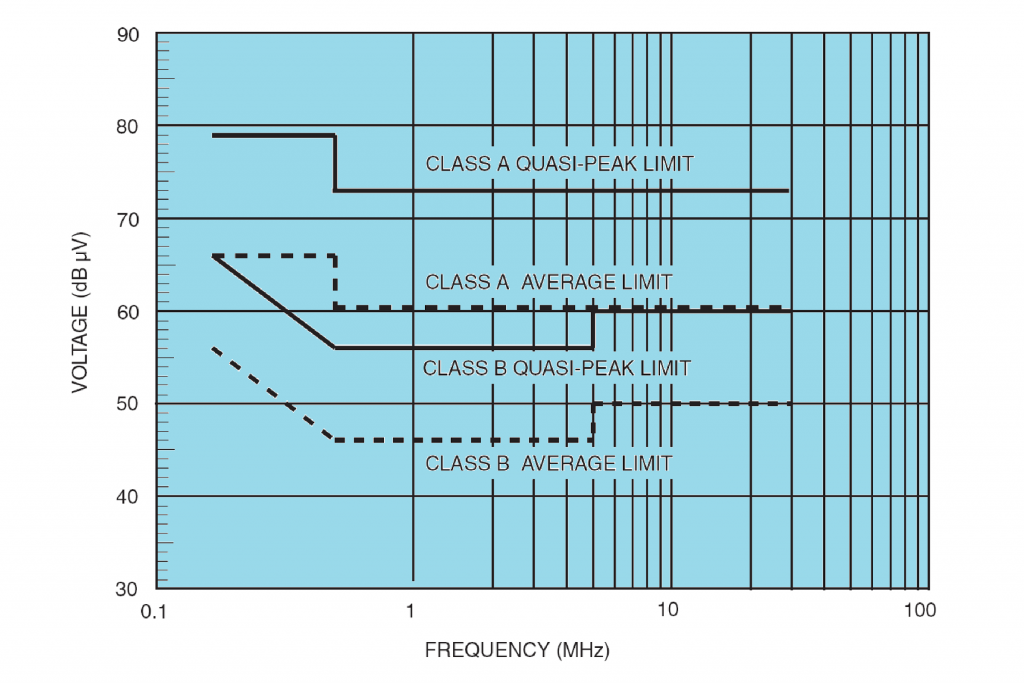
ดังแสดงในรูปที่ 13(ก) แสดงเส้นขีดจำกัดที่ระบุไว้ในมาตรฐานนานาชาติ CISPR สำหรับการวัดสัญญาณรบกวนแม่เหล็กไฟฟ้าทางสายตัวนำด้วยโพรบวัดแรงดันและโดยใช้ LISN อ้างอิงตามมาตรฐาน CISPR 11 และ CISPR 22 ซึ่งจะสังเกตเห็นได้ว่า เส้นมาตรฐานที่ระบุสำหรับโพรบวัดแรงดันจะมีค่าสูงกว่ากรณีใช้ LISN โดยหากเปรียบเทียบระหว่าง Class A และ Class B (เฉพาะกรณีใช้ LISN ในการตรวจวัด) ดังแสดงในรูปที่ 13(ข) จะเห็นได้ว่าเส้นขีดจำกัดของบริภัณฑ์ทดสอบที่จัดอยู่ตระกูล Class A จะสูงกว่ากรณี Class B แต่หากกล่าวโดยเฉพาะสำหรับอุปกรณ์ดิจิตอล Class A และ Class B อ้างอิงตามมาตรฐาน FCC part 15 และ CISPR 22 เส้นขีดจำกัดสำหรับการวัดโดยใช้ LISN ได้ระบุไว้ในตารางที่ 4 และ ตารางที่ 5 ตามลำดับ
ตารางที่ 4 เส้นขีดจำกัดของ CISPR และ FCC สำหรับอุปกรณ์ดิจิตอล Class A
ตารางที่ 5 เส้นขีดจำกัดของ CISPR และ FCC สำหรับอุปกรณ์ดิจิตอล Class B
(ก)
(ข)
รูปที่ 13 (ก) เส้นขีดจำกัดที่กำหนดโดย CISPR สำหรับการวัดสัญญาณรบกวนแม่เหล็กไฟฟ้าทางสายตัวนำโดยใช้โพรบวัดแรงดันและโดยใช้ LISN อ้างอิงตามมาตรฐาน CISPR 11+A1:1999 และ CISPR 22:1993/A1:1995 โดยค่ายอดเสมือนแทนด้วยเส้นทึบและค่าเฉลี่ยแทนด้วยเส้นประ [8] (ข) เส้นขีดจำกัดที่กำหนดโดย FCC และ CISPR สำหรับสัญญาณรบกวนแม่เหล็กไฟฟ้าทางสายตัวนำสำหรับอุปกรณ์ดิจิตอล Class A และ Class B ดังแสดงในตารางที่ 4 และ 5 [7]
การติดตั้งเพื่อการวัดสัญญาณรบกวนแม่เหล็กไฟฟ้าทางสายตัวนำให้เป็นไปตามมาตรฐานเดียวกันสำหรับกรณีบริภัณฑ์ทดสอบทั้งที่วางอยู่บนโต๊ะไม้และวางไว้บนระนาบพื้นอ้างอิง ดังแสดงในรูปที่ 14 และ 15 ตามลำดับ โดยที่มาตรฐาน ASNI C63.4-1992 ได้กำหนดรายละเอียดต่างๆไว้คร่าวๆดังนี้
เนื่องจากรายละเอียดปลีกย่อยสำหรับการติดตั้งมีมาก ดังนั้น สำหรับรายละเอียดเพิ่มเติมสามารถหาอ่านได้ในมาตรฐานที่เกี่ยวข้อง เช่น ASNI C63.4-1992 หรือเอกสารอ้างอิง [1] สำหรับที่กำหนดไว้โดย CISPR 22 เป็นต้น
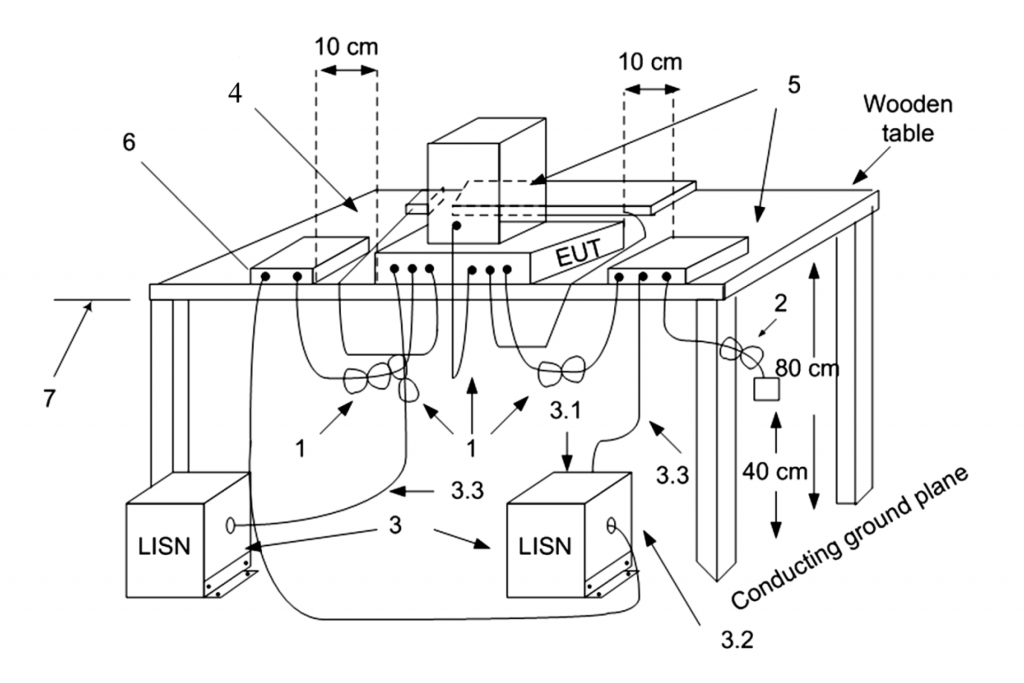
รูปที่ 14 การติดตั้งเพื่อวัดสัญญาณรบกวนแม่เหล็กไฟฟ้าทางสายตัวนำที่บริภัณฑ์ทดสอบวางบนโต๊ะไม้ตามมาตรฐาน ANSI C63.4-1992
สำหรับคำอธิบายรูปที่ 14 มีดังนี้
3.1 โดยที่อุปกรณ์อื่นๆ จะรับพลังงานโดยผ่าน LISN ตัวที่ 2
3.2 เต้ารับสามารถนำมาใช้ได้สำหรับจ่ายพลังงานให้กับอุปกรณ์อื่นๆที่ไม่ใช่ EUT
3.3 LISN จะต้องวางอยู่ห่างอย่างน้อย 80 เซนติเมตรจาก EUT
รูปที่ 15 การติดตั้งเพื่อวัดสัญญาณรบกวนแม่เหล็กไฟฟ้าทางสายตัวนำที่บริภัณฑ์ทดสอบวางบนระนาบอ้างอิงตาม ANSI C63.4-1992
สำหรับคำอธิบายรูปที่ 15 มีดังนี้
จากหัวข้อที่ 5 จะเห็นได้ว่าในการตรวจวัดสัญญาณรบกวนแม่เหล็กไฟฟ้าทางสายตัวนำที่เกิดจากอุปกรณ์อิเล็กทรอนิกส์ต่างๆ โดยอ้างอิงตามมาตรฐานสากลจะมีการกำหนดรูปแบบการจัดวางอุปกรณ์ต่างๆ รวมทั้งสายเชื่อมต่อและอุปกรณ์เชื่อมต่อต่างๆอย่างชัดเจนเพื่อให้สามารถวัดซ้ำได้โดยค่าที่ตรวจวัดได้ไม่คลาดเคลื่อนไปมากนั่นเอง
อย่างไรก็ตาม มีกลุ่มนักวิจัยนำโดย Marcos Quílez และ Jordi Escoda และ Ferran Silva แห่งมหาวิทยาลัย Universitat Politècnica de Catalunya ประเทศสเปน ได้ทำการทดลองเพื่อพิสูจน์ปัจจัยที่จะส่งผลทำให้เกิดความคลาดเคลื่อนต่อผลการวัดสัญญาณรบกวนแม่เหล็กไฟฟ้าทางสายตัวนำ ซึ่งได้ตีพิมพ์ในชื่อหัวเรื่องว่า “Analyzing the Repeatability of Conducted-Emissions Measurements” ลงในวารสาร Compliance Engineering Magazine [12] โดยใช้เครื่องมือวัดที่เป็นไปตามที่มาตรฐานกำหนดและได้ใช้สวิตชิ่งเพาเวอร์ซัพพลายเป็นอุปกรณ์ที่จะทำการทดสอบเพื่อตรวจวัดสัญญาณรบกวนแม่เหล็กไฟฟ้าทางสายตัวนำ ซึ่งสามารถสรุปผลการทดลองที่ได้จากบทความอ้างอิงดังกล่าวข้างต้นได้ดังนี้
ความคลาดเคลื่อนที่เกิดจากการติดตั้งโครงข่ายสร้างเสถียรภาพอิมพีแดนซ์
การทดสอบแรกเป็นการทดสอบเพื่อหาผลกระทบของตำแหน่งและการต่อลงกราวด์ของตัวโครงข่ายสร้างเสถียรภาพอิมพีแดนซ์ (LISN) โดย Marcos Quílez และทีมงานได้ทดสอบสองกรณีคือ
โดยการทดสอบทั้งสองกรณีเงื่อนไขอื่นๆนอกเหนือจากที่กล่าวข้างต้นจะเหมือนกันทั้งหมด ผลการทดสอบได้แสดงไว้ในรูปที่ 16 ซึ่งจะเห็นได้ว่ามีความแตกต่างระหว่างสองกรณีอย่างชัดเจน โดยจะเห็นได้ว่ากรณีวาง LISN ไว้บนโต๊ะไม่เป็นไปตามมาตรฐานกำหนดจะให้ผลการตรวจวัดสัญญาณรบกวนแม่เหล็กไฟฟ้าทางสายตัวนำที่สูงกว่าอีกกรณี
รูป 3 blog
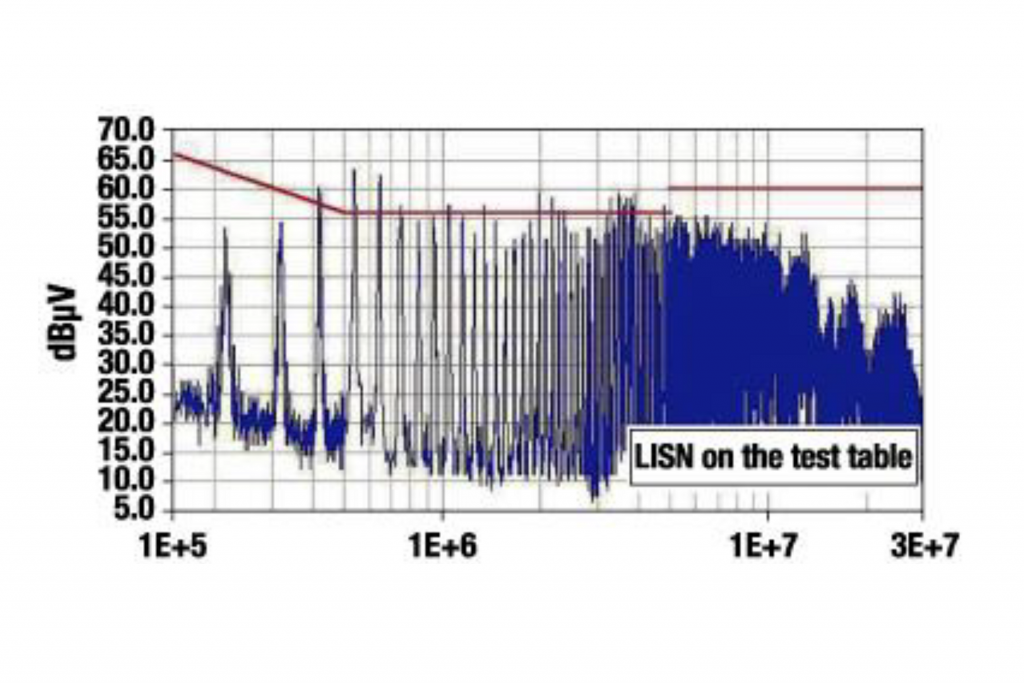
รูปที่ 16 ความคลาดเคลื่อนที่เกิดจากการติดตั้ง LISN [12]
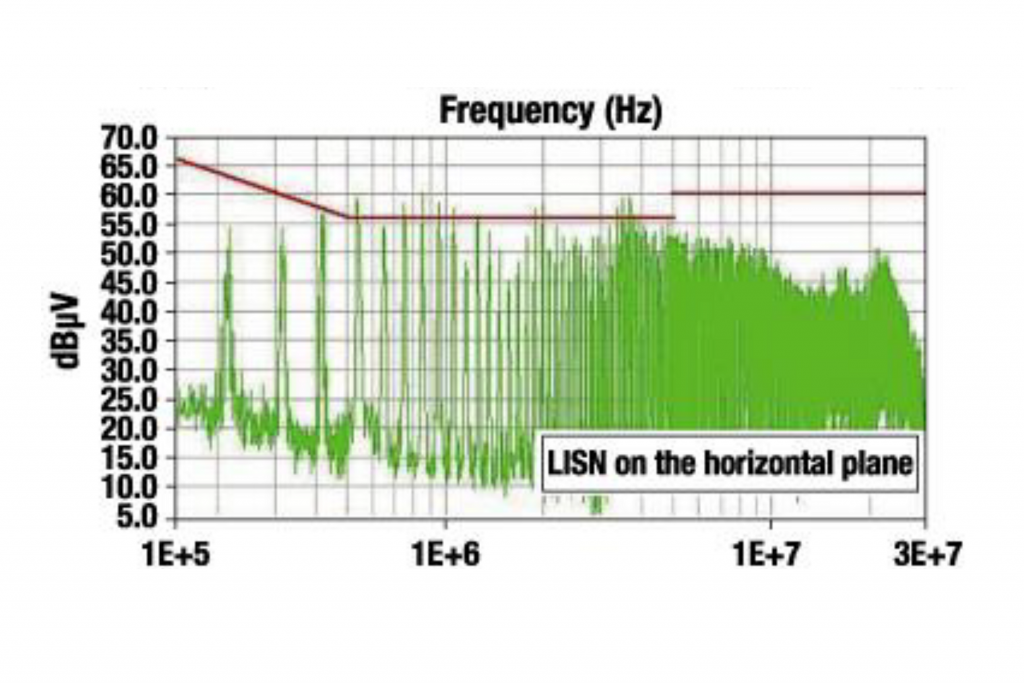
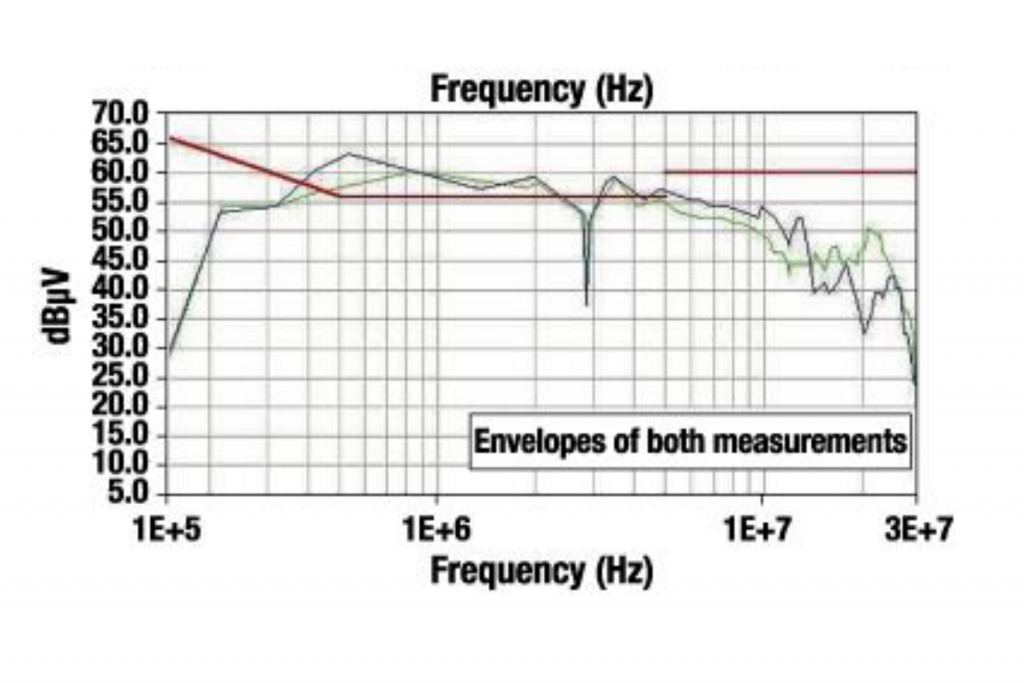
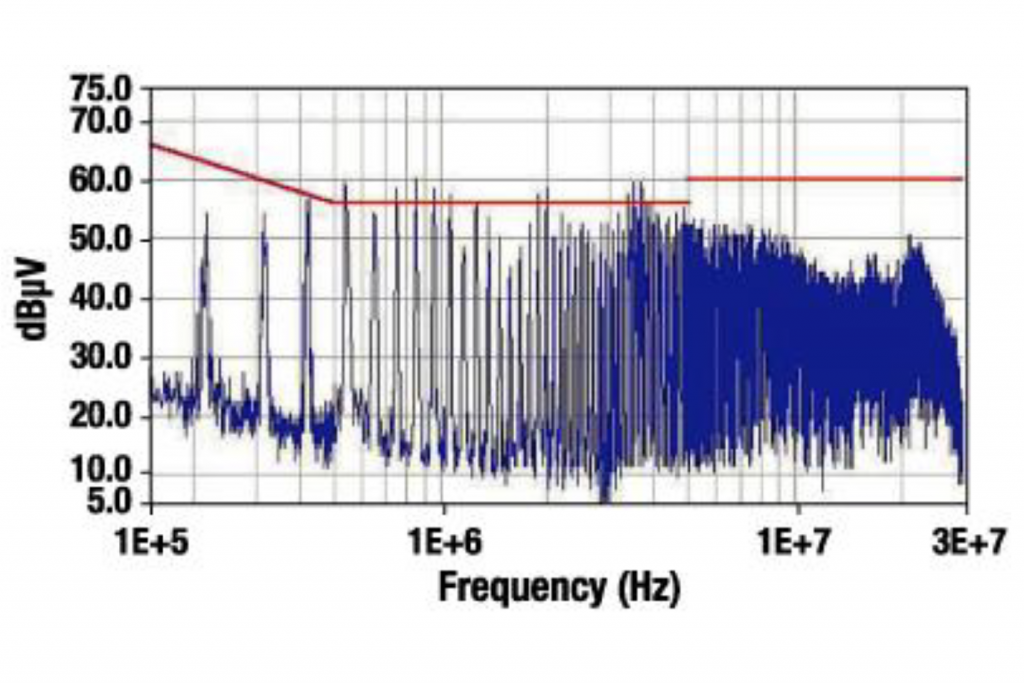
ในการทดสอบนี้เป็นการทดสอบเพื่อหาผลกระทบของระยะหว่างระหว่างบริภัณฑ์ทดสอบกับระนาบกราวด์ที่วางในแนวตั้งฉาก (vertical reference plane) ซึ่งตามมาตรฐานได้กำหนดให้ด้านหลังของขอบโต๊ะควรจะวางห่างจากระนาบกราวด์ที่วางในแนวตั้งฉากกับระนาบกราวด์ที่วางบนพื้น (โดยระนาบกราวด์ทั้งสองเชื่อมต่อติดกัน) เท่ากับ 40 เซนติเมตร อย่างไรก็ตาม เพื่อพิสูจน์ให้เห็นจริงว่าหากการติดตั้งไม่เป็นไปตามเงื่อนไขที่มาตรฐานกำหนดดังกล่าวจะส่งผลกระทบต่อขนาดของสัญญาณรบกวนแม่เหล็กไฟฟ้าทางสายตัวนำอย่างไร การทดสอบเพื่อพิสูจน์สมมุติฐานดังกล่าวได้แสดงในรูปที่ 17 โดยจะทดสอบเมื่อระยะหว่างระหว่างบริภัณฑ์ทดสอบ (สวิตชิ่งเพาเวอร์ซัพพลาย) กับระนาบกราวด์ที่วางในแนวตั้งฉากห่างกันเท่ากับ 20, 40 และ 60 cm ตามลำดับ โดยเงื่อนไขอื่นๆนอกเหนือจากที่กล่าวข้างต้นจะเหมือนกันทั้งหมด และผลการทดสอบได้แสดงไว้ในรูปที่ 18 ซึ่งจะเห็นได้ว่าที่ความถี่ต่ำ 150kHz – 1MHz ยิ่งระยะห่างน้อยลงเท่าไหร่ขนาดของสัญญาณรบกวนแม่เหล็กไฟฟ้าทางสายตัวนำก็จะยิ่งสูงขึ้นเท่านั้นที่เป็นเช่นนี้ก็เพราะขนาดของสัญญาณรบกวนแม่เหล็กไฟฟ้าทางสายตัวนำในกรณีนี้จะขึ้นอยู่กับค่าความจุไฟฟ้าแฝงระหว่างบริภัณฑ์ทดสอบกับระนาบกราวด์ที่วางในแนวตั้งฉาก โดยยิ่งระยะห่างน้อยลงเท่าไหร่ค่าความจุไฟฟ้าแฝงก็จะยิ่งเพิ่มสูงขึ้นส่งผลให้ขนาดของสัญญาณรบกวนเพิ่มสูงขึ้นนั่นเอง
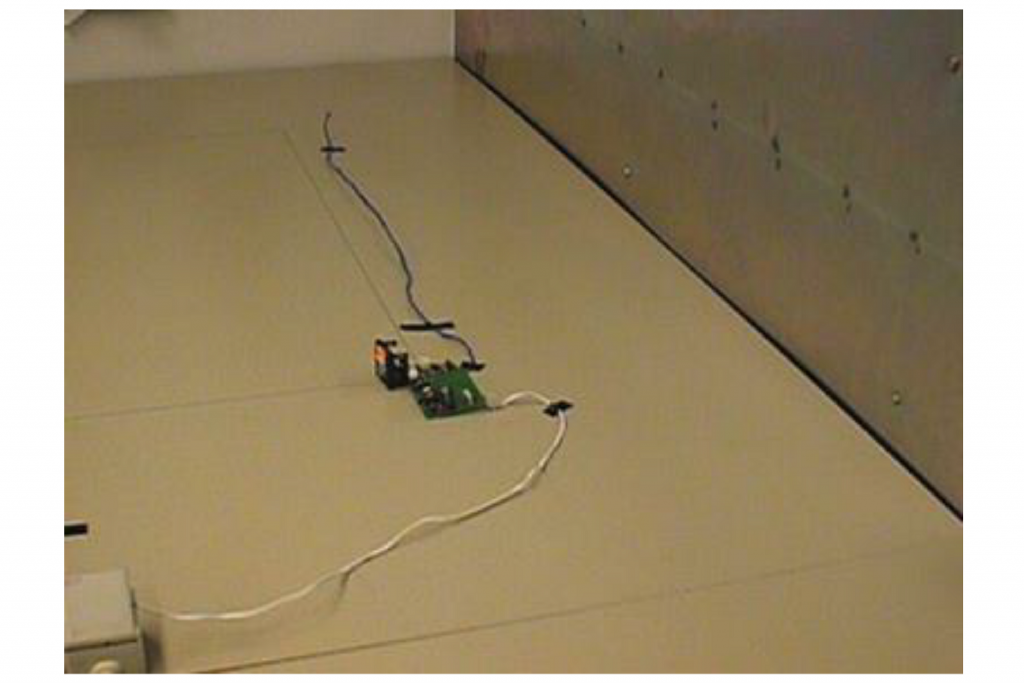
รูปที่ 17 การทดสอบเพื่อหาความคลาดเคลื่อนจากการวัดเมื่อระยะหว่างระหว่างบริภัณฑ์ทดสอบ (สวิตชิ่งเพาเวอร์ซัพพลาย) กับระนาบกราวด์ที่วางในแนวตั้งฉากห่างกันเท่ากับ 20, 40 และ 60 cm [12]
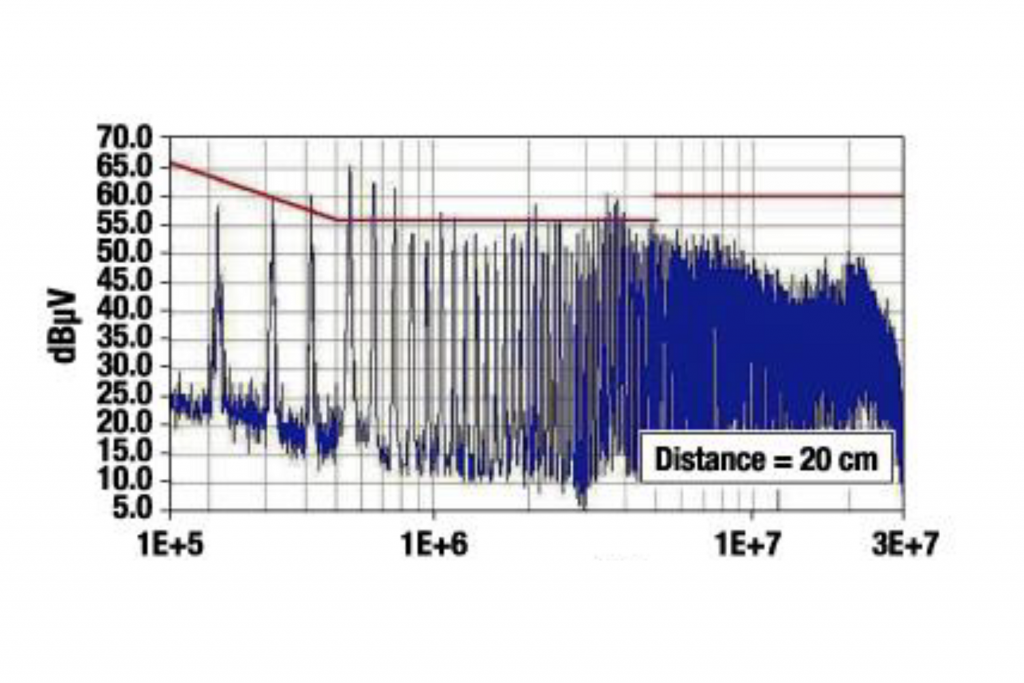
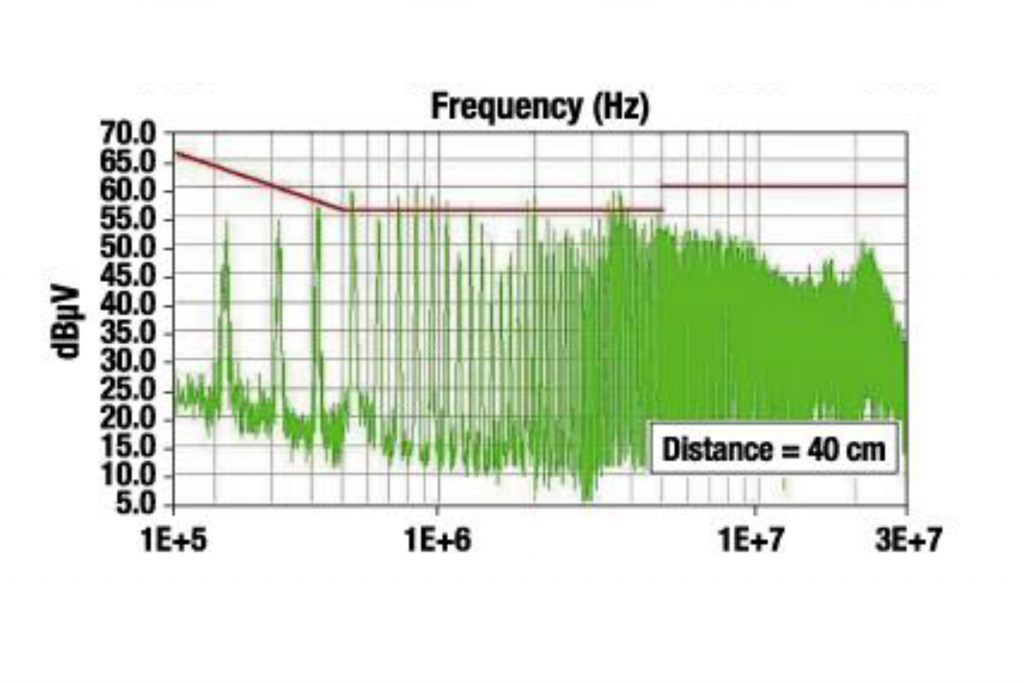
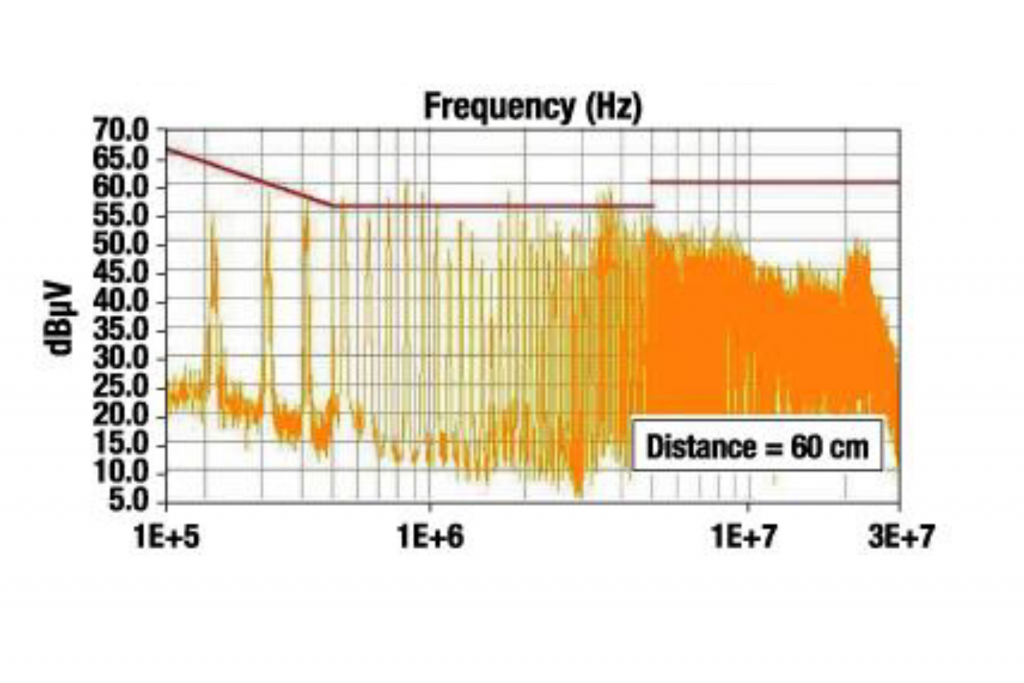
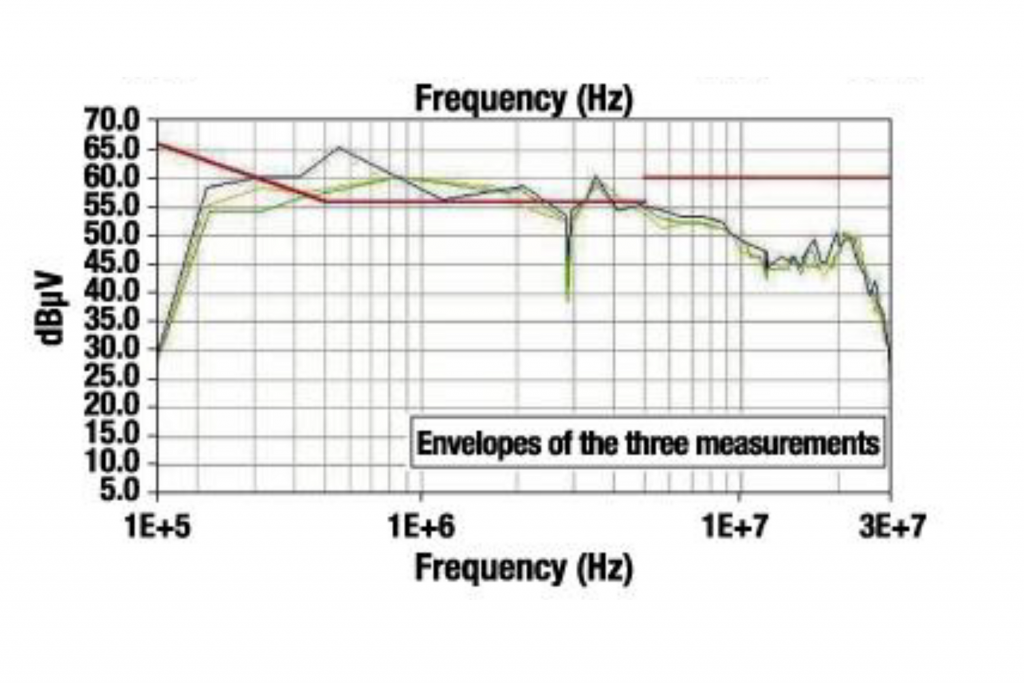
รูปที่ 18 ผลการวัดขนาดของสัญญาณรบกวนแม่เหล็กไฟฟ้าทางสายตัวนำเมื่อระยะหว่างระหว่างบริภัณฑ์ทดสอบ (สวิตชิ่งเพาเวอร์ซัพพลาย) กับระนาบกราวด์ที่วางในแนวตั้งฉากห่างกันเท่ากับ 20, 40 และ 60 cm [12]
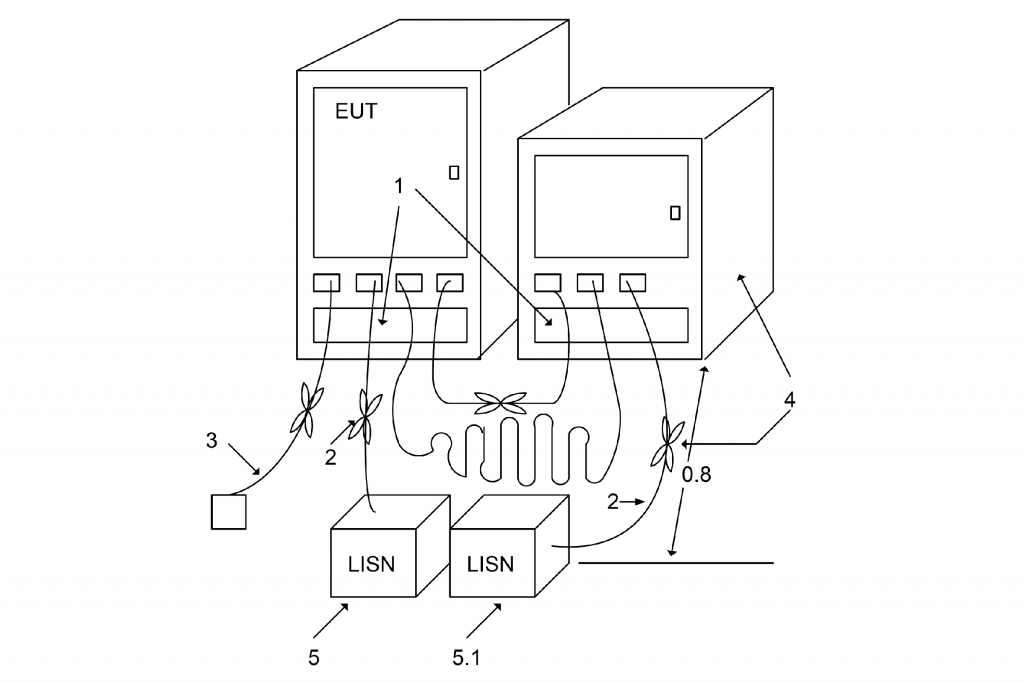
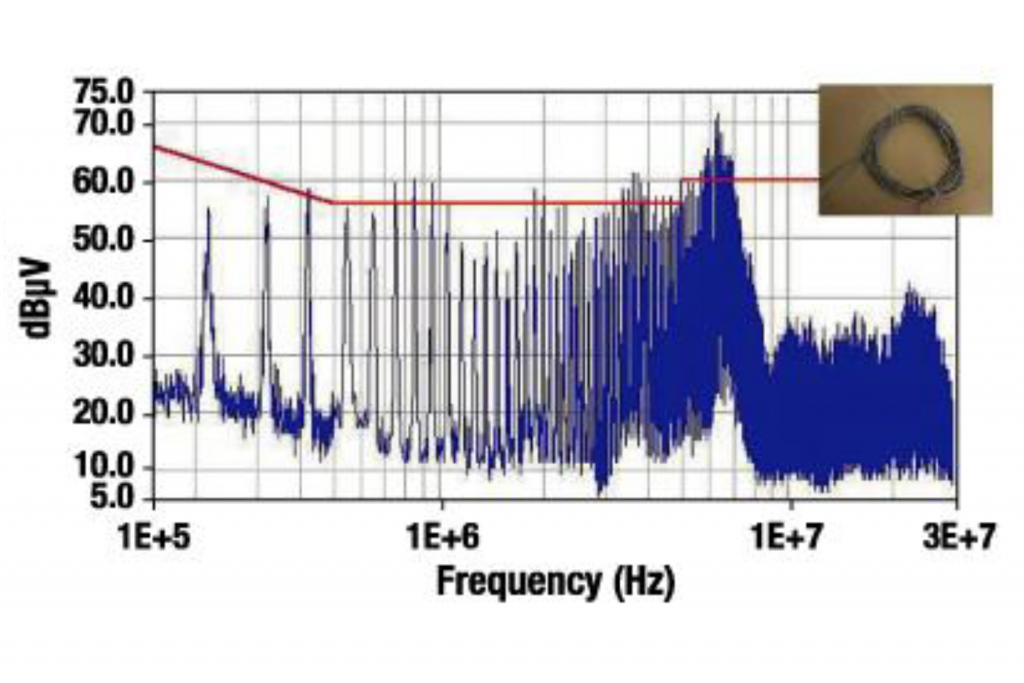
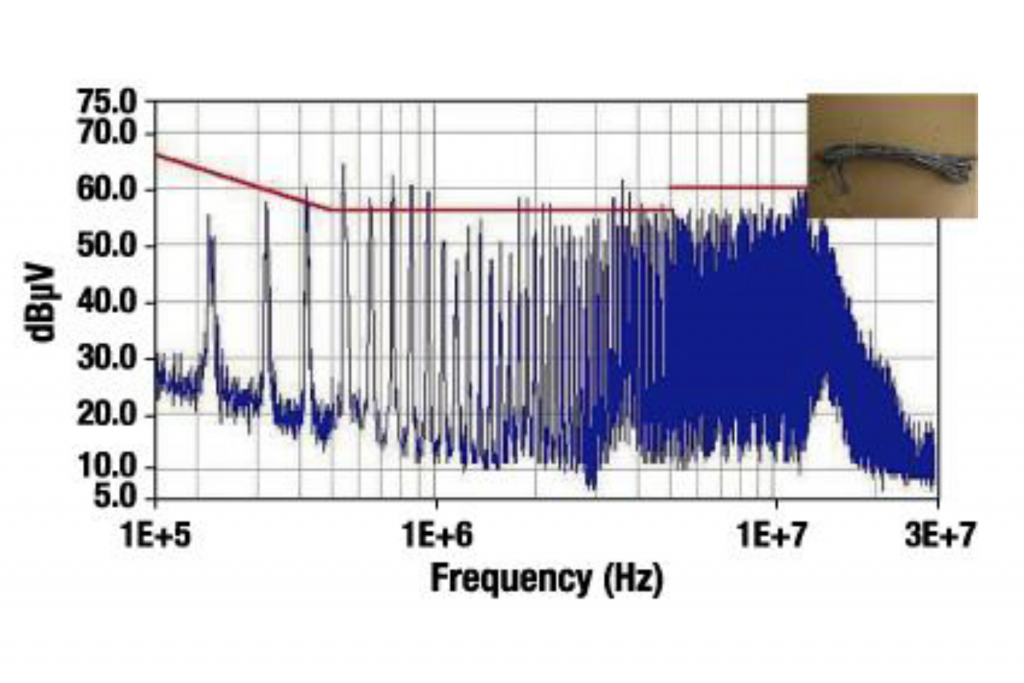
ถึงแม้ว่าตามมาตรฐานจะกำหนดให้สายเคเบิลที่ใช้มีความยาวเท่ากับ 80 cm โดยหากความยาวสายเกินกว่า 80 cm ควรม้วนทบสายดังกล่าวโดยให้ปมของสายอยู่ตรงกลางและความยาวสายจะต้องยาวไม่เกิน 40 เซนติเมตร อย่างไรก็ตาม ควรม้วนทบอย่างไรถึงจะถูกต้องเนื่องจากการม้วนทบสามารถกระทำได้หลายรูปแบบ สำหรับคำตอบต่อคำถามดังกล่าว การม้วนทบที่ถูกต้องควรจะทำให้เกิดค่าความเหนี่ยวนำแฝงน้อยที่สุดดังแสดงในรูปที่ 19

(ก)

(ข)

(ค)
รูปที่ 19 วิธีการม้วนทบที่ถูกต้องที่ทำให้เกิดค่าความเหนี่ยวนำแฝงน้อยที่สุด [12]
อย่างไรก็ตาม หากทำการม้วนทบในลักษณะอื่นจะส่งผลกระทบอย่างไร ดังแสดงในรูปที่ 20 ซึ่งเป็นการทดสอบกรณีใช้สายที่มีความยาวเท่ากับ 0.8 m ตามที่มาตรฐานกำหนด ใช้สายยาว 5 เมตรที่มีการม้วนทบเป็นวงกลม และใช้สายยาว 5 เมตร โดยม้วนทบในลักษณะทับไปทับมาตามลำดับ จากผลการทดลองในรูปที่ 20 จะเห็นได้ว่าความยาวสายที่สั้นที่สุด (0.8 m) ผลการวัดของสัญญาณรบกวนแม่เหล็กไฟฟ้าทางสายตัวนำจะมีค่าต่ำที่สุด แต่สำหรับกรณีที่กำหนดให้ความยาวสายเคเบิลมีค่าเท่ากัน (ในกรณีนี้ 5 เมตร) แต่รูปแบบในการม้วนทบสายแตกต่างกัน ผลลัพธ์ที่ได้จะแตกต่างกันที่บางความถี่โดยเฉพาะอย่างยิ่งที่ความถี่สูงดังแสดงในรูปที่ 20 (ข) และ (ค) ซึ่งจะเห็นได้ว่าที่ความถี่สูงกว่า 5MHz ผลการวัดของสัญญาณรบกวนแม่เหล็กไฟฟ้าทางสายตัวนำจะมีความแตกต่างสูงสุดถึงประมาณ 25dBuV โดยสายที่ม้วนทบในลักษณะวงกลม (ทำให้เกิดค่าความเหนี่ยวนำแฝงสูงที่สุด) จะมีค่าสูงที่สุดนั่นเอง
(ก)
(ข)
(ค)
รูปที่ 20 ผลการม้วนทบสายแบบต่างๆต่อขนาดของสัญญาณรบกวนแม่เหล็กไฟฟ้าทางสายตัวนำพิสูจน์ไว้โดย Marcos Quílez, Jordi Escoda, และ Ferran Silva [12]
ในบทความฉบับนี้ได้นำเสนอเครื่องมือวัดและการติดตั้งการวัดสัญญาณรบกวนแม่เหล็กไฟฟ้าทางสายตัวนำว่าสามารถวัดได้อย่างไร มีเครื่องมือที่จำเป็นใดบ้าง และได้อธิบายถึงสาเหตุที่มาตรฐานสากลได้กำหนดเครื่องมือที่ใช้และรูปแบบการจัดวางอุปกรณ์และสายเชื่อมต่อต่างๆ ในการตรวจวัดสัญญาณรบกวนแม่เหล็กไฟฟ้าทางสายตัวนำที่ชัดเจนและลงรายละเอียด ซึ่งจะเห็นได้ว่าเพื่อให้ผลการวัดสามารถกระทำซ้ำได้นั่นเอง โดยเครื่องมือวัดที่จำเป็นจะต้องใช้จะได้แก่ โครงข่ายสร้างเสถียรภาพอิมพีแดนซ์ ซึ่งจะทำหน้าที่ในการป้องกันสัญญาณรบกวนที่จะเข้ามาจากระบบไฟฟ้ากำลัง และทำให้บริภัณฑ์ทดสอบมองเห็นอิมพีแดนซ์ของระบบไฟฟ้ากำลังมีค่าคงที่เท่ากับ 50 โอห์ม อย่างไรก็ตาม ในบางกรณีที่บริภัณฑ์ทดสอบมีขนาดของกระแสสูงเกินกว่าพิกัดของโครงข่ายสร้างเสถียรภาพอิมพีแดนซ์ที่จำหน่ายในท้องตลาด หรือกรณีระบบที่ทำการตรวจวัดไม่สามารถทำการติดตั้งได้ตามที่มาตรฐานกำหนดในกรณีดังกล่าวนี้สามารถใช้โพรบวัดแรงดันในการวัดได้ และหากต้องการวัดสัญญาณรบกวนแม่เหล็กไฟฟ้าทางสายตัวนำในย่านความถี่ระหว่าง 30 MHz-300 MHz ก็สามารถกระทำได้เช่นเดียวกันด้วยการใช้โพรบกำลัง
เอกสารอ้างอิง
1. สำนักงานมาตรฐานผลิตภัณฑ์อุตสาหกรรม “บริภัณฑ์เทคโนโลยีสารสนเทศ:ขีดจำกัดสัญญาณรบกวนวิทยุ”, มอก 1956-2553.
2. สำนักงานมาตรฐานผลิตภัณฑ์อุตสาหกรรม “ข้อกำหนดสำหรับอุปกรณ์และวิธีการวัดสัญญาณรบกวนวิทยุและภูมิคุ้มกัน เล่ม 1-2 อุปกรณ์วัดสัญญาณรบกวนวิทยุและภูมิคุ้มกัน - บริภัณฑ์ช่วยสัญญาณรบกวนที่นำตามสาย,” มอก. 1441 เล่ม 2 2548.
3. Specification for radio disturbance and immunity measurement apparatus and methods - Part 1: Radio disturbance and immunity measuring apparatus, CISPR 16-1, 1999.
4. Specification for radio disturbance and immunity measurement apparatus and methods - Part 2: Methods of measurement of disturbances and immunity, CISPR 16-2, 1999.
5. V. Prasad Kodali, Engineering Electromagnetic Compatibility: Principle, Measurements, Technologies, and Computer Models, IEEE Press, 2001.
6. Tim Williams, EMC for Product Designers, Newsnes, 4th edition, 2009.
7. Henry W. Ott, Electromagnetic Compatibility Engineering, John Wiley & Sons, 2nd edition, 2009.
8. Mark I. Montrose and Edward M. Nakauchi, Testing for EMC Compliance: Approaches and Techniques, John Wiley & Sons, 1st edition, 2004.
9. J. R. Nicholson and J. A. Malack, “RF Impedance of power lines and line impedance stabilization networks in conducted interference measurement,” IEEE Trans. Electromagn. Compat., vol. 15, no. 2, pp. 84–86, May 1973.
10. D. Sakulhirirak, V. Tarateeraseth, W. Khan-ngern and N. Yoothanom,‘‘Design of High Performance and Low Cost Line Impedance Stabilization Network for University Power Electronics and EMC Laboratories", The 7th IEEE Power Electronics and Drive Systems, 27-30 November 2007.
11. Vuttipon Tarateeraseth, “Design of Three-Phase Line Impedance Stabilization Networks for EMC Pre-compliance Testing Laboratories”, the 9th International Conference on Electrical Engineering/Electronics, Computer, Telecommunications and Information Technology (ECTI-CON 2012), May 15‐17, 2013.
12. Marcos Quílez, Jordi Escoda, and Ferran Silva. “Analyzing the Repeatability of Conducted-Emissions Measurements” Compliance Engineering Magazine, Vol. XVIII, num. 3, p. 32-39, 2001.
13. วุฒิพล ธาราธีรเศรษฐ์, เอกสารคำสอนวิชาความเข้ากันได้ทางแม่เหล็กไฟฟ้า, พิมพ์ครั้งที่ 1, บริษัท โรงพิมพ์อักษรยสัมพันธ์ (1987) จำกัด, 2557.
สงวนลิขสิทธิ์ ตามพระราชบัญญัติลิขสิทธิ์ พ.ศ. 2539 www.thailandindustry.com
Copyright (C) 2009 www.thailandindustry.com All rights reserved.
ขอสงวนสิทธิ์ ข้อมูล เนื้อหา บทความ และรูปภาพ (ในส่วนที่ทำขึ้นเอง) ทั้งหมดที่ปรากฎอยู่ในเว็บไซต์ www.thailandindustry.com ห้ามมิให้บุคคลใด คัดลอก หรือ ทำสำเนา หรือ ดัดแปลง ข้อความหรือบทความใดๆ ของเว็บไซต์ หากผู้ใดละเมิด ไม่ว่าการลอกเลียน หรือนำส่วนหนึ่งส่วนใดของบทความนี้ไปใช้ ดัดแปลง โดยไม่ได้รับอนุญาตเป็นลายลักษณ์อักษร จะถูกดำเนินคดี ตามที่กฏหมายบัญญัติไว้สูงสุด