

บทความตอนนี้จะอธิบายถึงการเขียนโปรแกรมพีแอลซี Allen Bradley MicroLogix 1200 และ MicroLogix 1500 โดยจะอธิบายถึงการจัดการหน่วยความจำของพีแอลซี
ทำงานด้วยพีแอลซี Allen Bradley (ตอนที่ 5)
(Working with Allen Bradley PLCs)
วัชรชัย สิทธิพันธ์
บทความตอนนี้จะอธิบายถึงการเขียนโปรแกรมพีแอลซี Allen Bradley MicroLogix 1200 และ MicroLogix 1500 โดยจะอธิบายถึงการจัดการหน่วยความจำของพีแอลซี การกำหนดแอดเดรสของพีแอลซีและคำสั่งชนิดรีเลย์ที่ใช้สำหรับการโปรแกรมด้วยแลดเดอร์ไดอะแกรม
ส่วนประกอบและการทำงานของพีแอลซี
พีแอลซีประกอบด้วยแหล่งจ่ายไฟฟ้า หน่วยประมวลผลกลาง (CPU) อินพุตสำหรับเชื่อมต่อกับอุปกรณ์อินพุต เช่น สวิตซ์พรอกซิมิตี้เซนเซอร์ ลิมิตสวิตซ์ และเอาต์พุตสำหรับเชื่อมต่อกับอุปกรณ์เอาต์พุต เช่น ชุดสตาร์ทมอเตอร์ รีเลย์ หลอดไฟ
.jpg)
รูปที่ 1 โครงสร้างส่วนประกอบของพีแอลซี
สำหรับโปรแกรมลอจิกที่เราป้อนลงในพีแอลซีนั้น เมื่อพีแอลซีทำงาน การประมวลผลโปรแกรมของพีแอลซีนั้นจะเป็นรอบ เราเรียกว่ารอบการทำงาน (Operating Cycle) ในหนึ่งรอบการทำงานของพีแอลซีนั้นจะมีการทำงานเป็นลำดับตามแสดงในรูปที่ 2 โดยมีรายละเอียดแต่ละขั้นตอนดังต่อไปนี้
1) สแกนอินพุต (Input Scan) เป็นเวลาที่พีแอลซีใช้สำหรับอ่านข้อมูลอินพุตของพีแอลซีโดยเวลาที่ใช้นั้นเป็น ไมโครวินาที
2) สแกนโปรแกรม (Program Scan) เป็นเวลาที่พีแอลซีใช้สำหรับปฏิบัติการคำสั่งในโปรแกรมลอจิกก็คือโปรแกรมที่เราเขียนนั่นเอง เวลาที่ใช้นั้นขึ้นอยู่กับจำนวนคำสั่งที่ใช้หรือจำนวนโปรแกรมที่เราเขียนว่ามีขนาดแค่ไหน
3) สแกนเอาต์พุต (Output Scan) เป็นเวลาที่พีแอลซีใช้สำหรับเขียนข้อมูลเอาต์พุตของพีแอลซีโดยเวลาที่ใช้นั้นเป็นไมโครวินาที
4) การบริการการสื่อสาร (Service Communication) เป็นเวลาที่พีแอลซีใช้สื่อสารกับอุปกรณ์อื่นเช่น คอมพิวเตอร์ หรือ อุปกรณ์สำหรับโปรแกรม (Hand Help)
5) Housekeeping และ Overhead เป็นเวลาที่ พีแอลซี ใช้ในการจัดการดำเนินการให้พีแอลซีมีความพร้อมในการใช้งาน เช่น การตรวจสอบและจัดระเบียบหน่วยความจำ และเวลาส่วนเกินที่จำเป็น
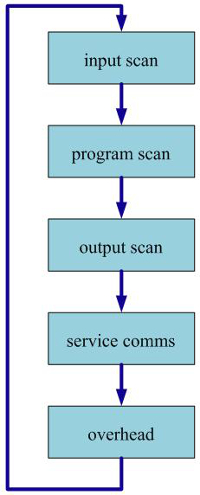
รูปที่ 2 ลำดับการทำงานในหนึ่งรอบการทำงานของพีแอลซี
หน่วยความจำของพีแอลซี และชนิดของไฟล์
- โครงสร้างของไฟล์
หน่วยความจำของพีแอลซี MicroLogix 1200 และ MicroLogix 1500 ประกอบด้วยไฟล์ข้อมูล (Data File) ไฟล์ฟังก์ชั่น (Function File) ไฟล์โปรแกรม (Program File)
ในตารางที่แสดง Data File หมายเลข 3 ถึง 7 นั้น เป็นไฟล์ที่กำหนดหมายเลขมาแล้ว เราไม่สามารถที่จะเปลี่ยนแปลงหมายเลขใหม่ได้ แต่ Data File หมายเลข 9 ถึง 255 นั้น เราสามารถเพิ่มในโปรแกรมของเราได้โดยสามารถกำหนดเป็น Bit, Timer, Counter, Control, Integer, String, Long word, Message หรือ PID
ตารางโครงสร้างไฟล์
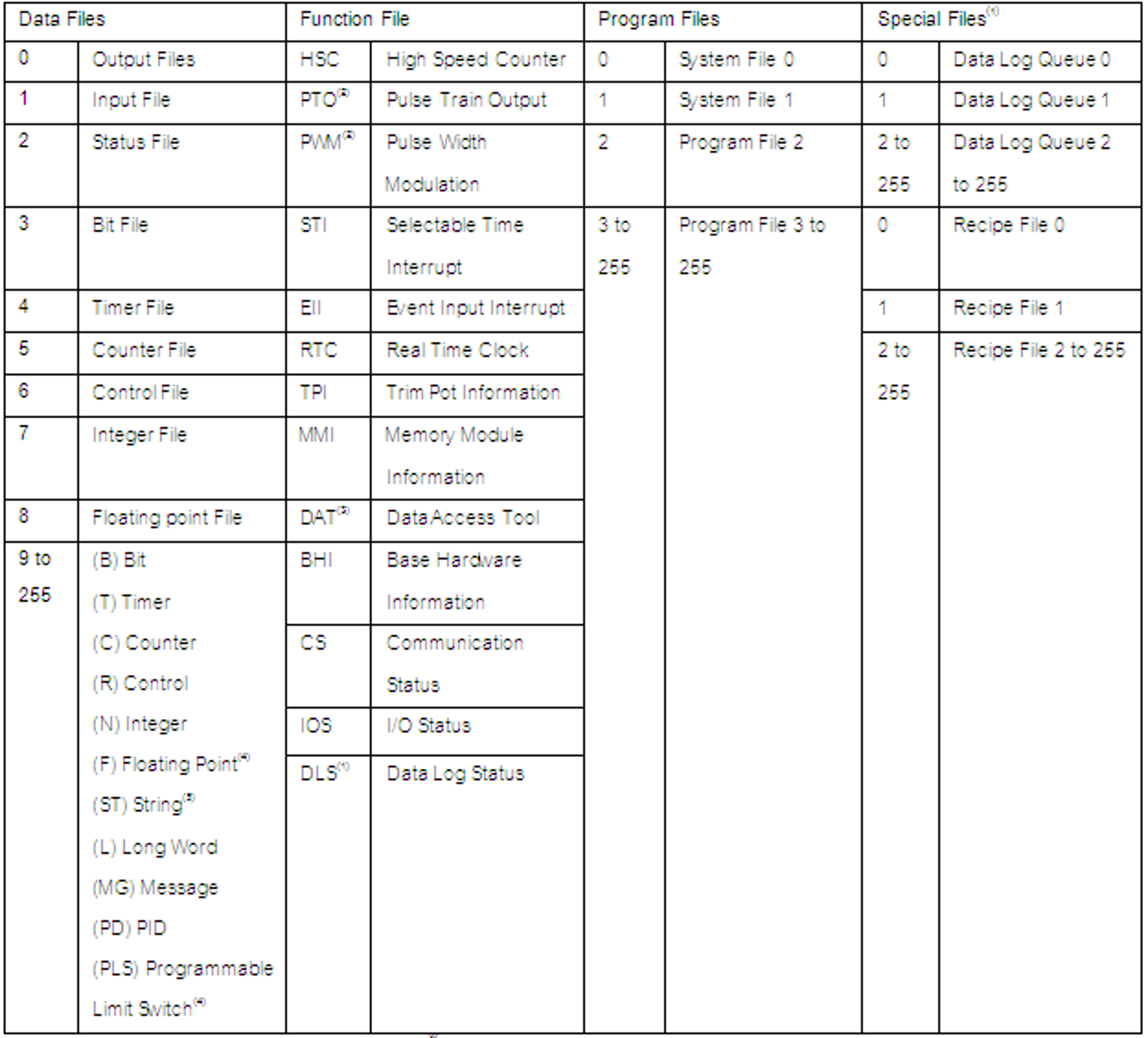
(1) ไฟล์พิเศษสำหรับการเก็บข้อมูลนั้นใช้เฉพาะสำหรับพีแอลซี MicroLogix 1500 โปรเซสเซอร์ 1764-LRP และไฟล์พิเศษสำหรับการจัดการสูตร(Recipe)นั้นใช้เฉพาะสำหรับพีแอลซี MicroLogix 1500 โปรเซสเซอร์ Series C
(2) PTO และ PWM ใช้เฉพาะสำหรับพีแอลซี MicroLogix1200 และ 1500 BXB units
(3) DAT ใช้เฉพาะสำหรับพีแอลซี MicroLogix1500
(4) Floating Point และ Programmable Limit Switch ใช้เฉพาะสำหรับพีแอลซี MicroLogix 1200 และ 1500 โปรเซสเซอร์ Series C
(5) String ใช้เฉพาะสำหรับพีแอลซี MicroLogix 1200 และ 1500 โปรเซสเซอร์ 1764-LSP Series B และ 1764-LRP
- หน่วยความจำผู้ใช้ (User Memory)
หน่วยความจำผู้ใช้นั้นใช้สำหรับเก็บ แลดเดอร์ลอจิกหรือโปรแกรมที่เราเขียนนั่นเอง ตารางไฟล์ข้อมูล การกำหนดคุณลักษณะของอินพุต/เอาต์พุต
ไฟล์ข้อมูลผู้ใช้ (User Data Files) ประกอบด้วย ไฟล์ลักษณะของระบบ (System Status File) ไฟล์อิมเมจของอินพุต/เอาต์พุต (I/O Image File) และไฟล์ข้อมูลที่ผู้ใช้สร้างขึ้นเอง เช่น Bit, Timer, Counter, Integer, String, MSG และ PID
การระบุขนาดหน่วยความจำของพีแอลซี
เวิร์ด (Word) เป็นการระบุหน่วยของหน่วยความจำของพีแอลซี ไฟล์ข้อมูล (Data File) หนึ่งเวิร์ดมีค่าเท่ากับ 16 บิต ของหน่วยความจำ ตัวอย่าง
1 Integer = 1 Word
1 Long Word = 2 Words
1 Timer = 3 Words
ไฟล์โปรแกรม เวิร์ดมีค่าเท่ากับ หนึ่งตัวถูกดำเนินการ (Operand) สำหรับ คำสั่งแลดเดอร์ ตัวอย่าง
1 คำสั่ง XIC มี 1 ตัวถูกดำเนินการใช้ 1 Word
1 คำสั่ง EQU มี 2 ตัวถูกดำเนินการใช้ 2 Words
1 คำสั่ง ADD มี 3 ตัวถูกดำเนินการใช้ 3 Words
หมายความว่า คำสั่งนั้นๆ ใช้กี่ตัวถูกดำเนินการก็ใช้หน่วยความจำเท่ากับจำนวนตัวถูกดำเนินการเป็นเวิร์ด
ไฟล์ฟังก์ชั่น ไม่ได้ใช้งานหน่วยความจำผู้ใช้
หน่วยความจำผู้ใช้ของพีแอลซี MicroLogix 1200
พีแอลซี MicroLogix 1200 รองรับหน่วยความจำ 6K หน่วยความจำสามารถใช้สำหรับไฟล์โปรแกรมและไฟล์ข้อมูล โดยที่ความจุสูงสุดของหน่วยความจำข้อมูลผู้ใช้เท่ากับ 2K Words
หน่วยความจำผู้ใช้ของพีแอลซี MicroLogix 1500
โปรเซสเซอร์รุ่น 1764-LSP รองรับหน่วยความจำสูงสุด 7K หน่วยความจำสามารถใช้สำหรับไฟล์โปรแกรม และ ไฟล์ข้อมูลโดยที่ความจุสูงสุดของหน่วยความจำข้อมูลผู้ใช้เท่ากับ 4K Words
พีแอลซี MicroLogix 1500 โปรเซสเซอร์รุ่น 1764-LRP
โปรเซสเซอร์รุ่น 1764-LRP รองรับหน่วยความจำสูงสุด 14K หน่วยความจำสามารถใช้สำหรับไฟล์โปรแกรมและไฟล์ข้อมูลโดยที่ความจุสูงสุดของหน่วยความจำข้อมูลผู้ใช้เท่ากับ 4K Words
ตรวจสอบหน่วยความจำที่ใช้ของพีแอลซี
เราสามารถตรวจสอบหน่วยความจำของพีแอลซีด้วยโปรแกรม RSLogix500 โดยเลือกที่ Controller Properties จะปรากฏหน้าต่างแสดงคุณสมบัติของพีแอลซีดังแสดงในรูปที่ 3
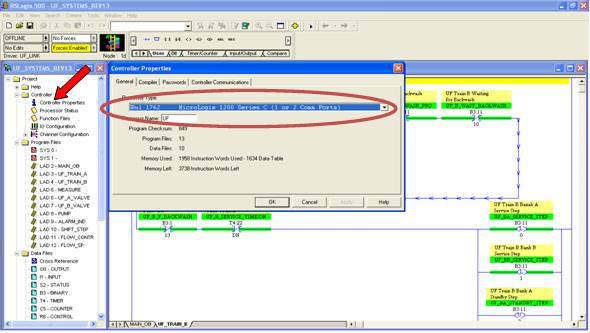
รูปที่ 3 แสดงหน่วยความจำที่ใช้งานของพีแอลซี
Data Files
Data Files จะเก็บข้อมูลตัวเลข รวมถึงอินพุต/เอาท์พุต สถานะต่าง ๆ และข้อมูลที่เกี่ยวข้องกับคำสั่งที่ใช้ในแลดเดอร์ของรูทีนย่อยหรือโปรแกรมย่อย
ตารางแสดงรายละเอียดของ Data File
.jpg)
โหมดของการกำหนดตำแหน่งที่อยู่ (ADDRESSING MODES)
การกำหนดตำแหน่งที่อยู่หรือที่เราเรียกกันทั่วไปว่าการกำหนดแอดเดรส สำหรับพีแอลซี MicroLogix 1200 หรือ MicroLogix 1500 นั้นรองรับการกำหนดตำแหน่งที่อยู่ 3 แบบด้วยกันคือ
1. การกำหนดตำแหน่งที่อยู่ทันที (Immediate)
2. การกำหนดตำแหน่งที่อยู่ทางตรง (Direct)
3. การกำหนดตำแหน่งที่อยู่ทางอ้อม (Indirect)
เราจะใช้โหมดของการกำหนดตำแหน่งที่อยู่อย่างไรและเมื่อไหร่นั้นขึ้นอยู่กับคำสั่งที่ใช้ในโปรแกรมและชนิดของสมาชิก (Element) ที่ระบุในตัวถูกดำเนินการ (Operands) ของคำสั่ง ด้วยโหมดของการกำหนดตำแหน่งที่อยู่นี้ทำให้เรามีความยืดหยุ่นในการแสดงหรือจัดการกับข้อมูล
การกำหนดตำแหน่งที่อยู่ทันที (Immediate Addressing)
การกำหนดตำแหน่งที่อยู่ทันทีเป็นการกำหนดค่าคงที่ในคำสั่ง ตัวอย่างเช่น เราต้องการตัวตั้งเวลา 10 วินาที ดังนั้นเราต้องกำหนด Time Base ของ Timer เท่ากับ 1 Second และกำหนด Preset Value เท่ากับ 10

รูปที่ 4 การกำหนดตำแหน่งที่อยู่ทันที
การกำหนดตำแหน่งที่อยู่ทางตรง (Direct Addressing)
เมื่อเรากำหนดตำแหน่งที่อยู่ทางตรงเราจะกำหนดตำแหน่งของข้อมูลในพีแอลซี โดยที่ตำแหน่งของข้อมูลนั้นเป็นสมาชิกของตัวถูกดำเนินการในคำสั่ง ยกตัวอย่างคำสั่ง Scale w/Parameter
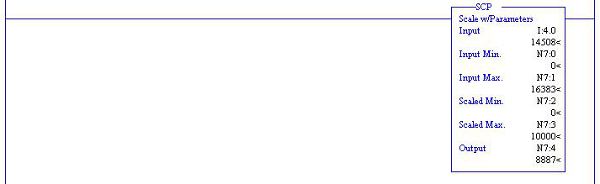
รูปที่ 5 การกำหนดตำแหน่งที่อยู่ทางตรง
จากคำสั่ง Scale w/Parameter ที่แสดงในรูปที่ 5
Input = I: 4.0 เป็นค่าจากแอนนะลอกอินพุตของพีแอลซี
Input Min = N7:0
Input Max = N7:1
Scaled Min = N7:2
Scaled Max = N7:3
Output = N7:4
Input Min, Input Max, Scaled Min, Scaled Max, Output ที่กำหนดด้วย N7:0, N7:1, N7:2, N7:3, N7:4 ตามลำดับนั้นเป็นการกำหนดแอดเดรสแบบทางตรง
การกำหนดตำแหน่งที่อยู่ทางอ้อม (Indirect Addressing)
การกำหนดแอดเดรสทางอ้อมนั้นอนุญาตให้สมาชิกที่อยู่ในแอดเดรสนั้นใช้เป็นตัวชี้ (Pointers, พอยเตอร์) ตำแหน่งของข้อมูลภายในพีแอลซีได้ ซึ่งวิธีนี้จะช่วยให้สะดวกสำหรับการทำงาน การจัดการสูตร (Recipe Management) การประมวลผลแบบต่าง ๆ (Batch Processing) แต่อาจจะทำให้เราเข้าใจยากนิดหน่อย
ยกตัวอย่างคำสั่ง ADD
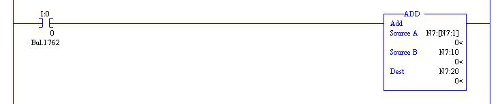
รูปที่ 6 การกำหนดตำแหน่งที่อยู่ทางอ้อม
จากคำสั่ง ADD ที่แสดงในรูปที่ 6
- Address: N7:[N7:1]
- ในตัวอย่าง จำนวนของสมาชิกที่ใช้ใน Source A ของคำสั่งบวกจะถูกกำหนดด้วยตัวเลขที่อยู่ในแอดเดรส N7:1 ถ้าตัวเลขเป็น N7:1=9 คำสั่งบวกจะทำการบวก N7:9 กับค่าใน Source B
คำสั่งสำหรับโปรแกรม
- การเขียนโปรแกรมพีแอลซีด้วยแลดเดอร์ไดอะแกรม
ภาษาแลดเดอร์ไดอะแกรมนั้นเป็นชุดคำสั่งที่ใช้สัญลักษณ์สำหรับเขียนโปรแกรมพีแอลซี หน้าที่หลักของแลดเดอร์ไดอะแกรมคือควบคุมการทำงานของเอาต์พุตโดยการทำงานนั้นจะอ้างอิงจากสถานะของอินพุต จากรูปที่ 7 แสดงโครงสร้างของแลดเดอร์ไดอะแกรมในแต่ละ rung ของแลดเดอร์ไดอะแกรมจะประกอบด้วยชุดคำสั่งของสถานะของอินพุตและคำสั่งเอาต์พุตจะอยู่ตอนท้ายของ rung
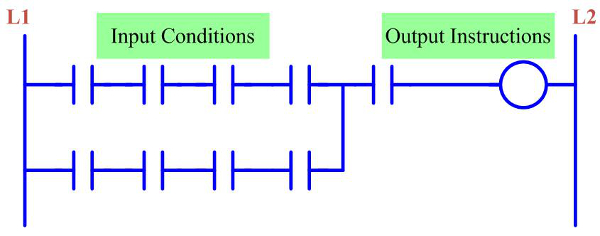
รูปที่ 7 โครงสร้างของแลดเดอร์ไดอะแกรม
คำสั่งคอนแทกต์ของ rung นั้นสามารถอ้างอิงกับสถานะของอินพุต สถานะของ rung หรือลอจิก rung ของแลดเดอร์ไดอะแกรมจะเป็นจริง (True)เมื่อลอจิกมีความต่อเนื่อง ลอจิกจะต่อเนื่องเมื่อมีการไหลของกำลัง (Power Flow)
จากด้านซ้ายของ rung ไปยังด้านขวาของ rung
การต่อเนื่องของกำลัง (Power Continuity) นั้น เราสามารถดูได้จากโปรแกรม RS Logix500 ที่เราใช้เขียนแลดเดอร์ไดอะแกรม
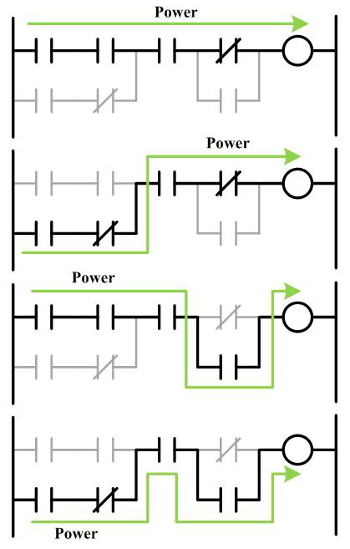
รูปที่ 8 การต่อเนื่องของกำลัง (Power Continuity)
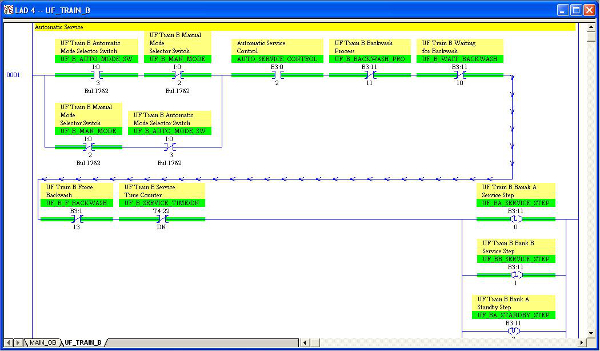
รูปที่ 9 การต่อเนื่องของกำลัง (Power Continuity) ในโปรแกรม RSLogix500
- คำสั่งชนิดรีเลย์ (Bit)
คำสั่งชนิดรีเลย์เป็นคำสั่งพื้นฐานในแลดเดอร์ไดอะแกรมคำสั่งนี้จะแสดงสถานะการ ON/OFF ของแอดเดรสอ้างอิง คำสั่งชนิดรีเลย์มีสองประเภทคือคอนแทกต์และคอยล์
XIC Examine if closed
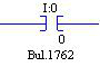
คำสั่ง XIC ก็คือคอนแทกต์ปกติเปิด หรือตรวจสอบสถานะการ ON ของแอดเดรสอ้างอิง แอดเดรสอ้างอิงนั้นสามารถดูจากตารางด้านล่าง เมื่อมีการปฏิบัติการคำสั่ง XIC ในโปรแกรมแลดเดอร์ไดอะแกรมโปรเซสเซอร์จะตรวจสอบแอดเดรสอ้างอิงของคำสั่งสำหรับสถานะ ON ถ้าแอดเดรสอ้างอิงเป็นลอจิก 0 (OFF) โปรเซสเซอร์จะไม่เปลี่ยนแปลงสถานะยังคงเป็นคอนแทกต์ปกติเปิดเช่นเดิม ดังนั้นก็จะไม่มีการไหลของกำลังใน rung ถ้าแอดเดรสอ้างอิงเป็นลอจิก 1 (ON) โปรเซสเซอร์จะเปลี่ยนเป็นปิด วงจรสำหรับคอนแทกต์ปกติเปิด ดังนั้นก็จะมีการไหลของกำลัง
XIO Examine if opened
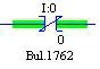
คำสั่ง XIO ก็คือคอนแทกต์ปกติปิด หรือ ตรวจสอบสถานะการ OFF ของแอดเดรสอ้างอิง
เมื่อมีการปฏิบัติการคำสั่ง XIO ในโปรแกรมแลดเดอร์ไดอะแกรมโปรเซสเซอร์จะตรวจสอบแอดเดรสอ้างอิงของคำสั่งสำหรับสถานะ OFF ถ้าแอดเดรสอ้างอิงเป็นลอจิก 0 (OFF) โปรเซสเซอร์จะไม่เปลี่ยนแปลงสถานะยังคงเป็นคอนเทคปกติปิดเช่นเดิม ดังนั้นก็จะมีการไหลของกำลังใน rungถ้าแอดเดรสอ้างอิงเป็นลอจิก 1 (ON) โปรเซสเซอร์จะเปลี่ยนเป็นเปิด วงจรสำหรับคอนแทกต์ปกติปิด ดังนั้นก็จะมีไม่มีการไหลของกำลัง
ตารางแสดงการทำงานของคำสั่ง XIC และ XIO
|
|
Address Bit |
XIC Instruction |
XIO Instruction |
|
True |
Off |
กลับสู่สภาวะ False |
กลับสู่สภาวะ True |
|
True |
On |
กลับสู่สภาวะ True |
กลับสู่สภาวะ False |
|
False |
-- |
ไม่สามารถประเมินได้ |
ไม่สามารถประเมินได้ |
ตารางแสดงการกำหนดแอดเดรสที่สามารถกำหนดได้และชนิดของไฟล์ของคำสั่ง XIC และ XIO

OTE Output Energize
.jpg)
คอยล์เอาต์พุต เป็นคำสั่งที่ควบคุมเอาต์พุตจริงของพีแอลซี หรือเอาต์พุตภายใน ตารางแสดงการกำหนดแอดเดรสที่สามารถกำหนดได้และชนิดของไฟล์ของคำสั่ง OTE OTU Output Unlatch คำสั่ง OTU หรือที่รู้จักกันทั่วๆ ไปว่า รีเซต คำสั่งนี้จะรีเซตเอาต์พุตที่มีแอดเดรสอ้างอิงเดียวกัน เมื่อมีการไหลของกำลังต่อเนื่องภายใน rung คำสั่ง OUT จะ OFF เอาต์พุต ตารางแสดงการกำหนดแอดเดรสที่สามารถกำหนดได้และชนิดของไฟล์ของคำสั่ง OTL และ OTU
ONS One Shot
คำสั่ง ONS จะคงสภาวะการกระตุ้นของคำสั่งอินพุตที่เกิดขึ้นหนึ่งครั้ง หลังจากมีการเปลี่ยนแปลงสถานะของ rung จาก 0 เป็น 1 คำสั่งของ ONS จะคงสถานะ ON ในหนึ่งเวลาสแกน เอาต์พุตจะ OFF และคงสภาวะ OFF จนกระทั่งลอจิกก่อนหน้าของคำสั่ง ONS เป็น 0 ตารางแสดงการทำงานของคำสั่ง ONS Rung Transition Storage Bit
False to True (one scan) Storage bit เซตเป็น 1 True True to True Storage bit ยังคงถูกเซตเป็น 1 False True to False, False to False Storage bit รีเซตเป็น 0 False ตารางแสดงการกำหนดแอดเดรสที่สามารถกำหนดได้และชนิดของไฟล์ของคำสั่ง ONS OSR One Shot Rising OSF One Shot Falling คำสั่ง OSR และ OSF ใช้สำหรับกระตุ้นการทำงานหนึ่งครั้งโดยการกระตุ้นการทำงานของคำสั่งนั้นจะขึ้นกับการเปลี่ยนแปลงสถานะของ rung ตามเงื่อนไขดังนี้ ตารางแสดงการทำงานของคำสั่ง OSR
Storage Bit Output Bit False to True (one sca) Storage bit เซตเป็น 1 bit เซตเป็น 1 True to True Storage bit เซตเป็น 1 bit รีเซตเป็น 0 True to False, False to Fals Storage bit รีเซตเป็น 0 bit รีเซตเป็น 0
Storage Bit Output Bit True to False (one scan) Storage bit รีเซตเป็น 0 bit เซตเป็น 1 False to Fals Storage bit รีเซตเป็น 0 bit รีเซตเป็น 0 False to True, True to True Storage bit เซตเป็น 1 bit รีเซตเป็น 0 เอกสารอ้างอิง
เมื่อมีการปฏิบัติการคำสั่ง เอาต์พุตโปรเซสเซอร์จะตรวจสอบสถานะของอินพุตของ Rung ถ้าไม่มีการไหลของกำลังต่อเนื่องโปรเซสเซอร์จะกำหนดแอดเดรสอ้างอิงของคอยล์เอาต์พุตเป็น 0 แต่ถ้ามีการไหลของกำลังต่อเนื่อง โปรเซสเซอร์จะกำหนดแอดเดรสอ้างอิงของคอยล์เอาต์พุตเป็น 1
คำสั่ง OTE จะรีเซต (OFF) เมื่อ
- เรากำหนดโหมดของพีแอลซีเป็น Program หรือ Remote Program
- OTE ถูกโปรแกรมให้อยู่ในรีเซตโซนของ Master Control
OTL Output Latch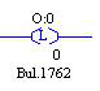
คำสั่งแลตซ์เอาต์พุตหรือรู้จักกันทั่ว ๆ ไปว่าเซตคำสั่ง OTL จะคงสถานะของเอาต์พุตเมื่อมีการไหลของกำลังต่อเนื่องภายใน rung คำสั่ง OTL จะ ON เอาต์พุตและจะคงสถานะ ON ของเอาต์พุตไว้เมื่อไม่มีการไหลของกำลังหรือไฟดับ เอาต์พุตก็จะคงยังสถานะ ON อยู่จนกว่าจะมีคำสั่ง OTU 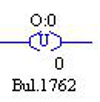
.jpg)
.jpg)
Storage bit ของคำสั่ง ONS คือแอดเดรสที่จำสถานะของ rung ในรอบสแกนก่อนหน้า บิตนี้จะใช้จำการเปลี่ยนแปลงสถานะของ rung จาก 0 เป็น 1
.jpg)
.jpg)
- ใช้คำสั่ง OSR เมื่อกระต้นการทำงานจากสถานะของ rung จาก False to True หรือขอบขาขึ้น
- ใช้คำสั่ง OSF เมื่อกระต้นการทำงานจากสถานะของ rung จาก True to False หรือขอบขาลง
คำสั่ง OSR และคำสั่ง OSF ใช้สองพารามิเตอร์คือ Storage bit กับ Output bit
- Storage bit เป็น bit แอดเดรสสำหรับจำสถานะของ rung ของรอบการสแกนก่อนหน้า
- Output bit เป็น bit แอดเดรสที่เซตเมื่อการเปลี่ยนแปลงสถานะของ rung เปลี่ยนจาก False to True (OSR) หรือ True to False (OSF) Output bit จะเซตแค่หนึ่งรอบการสแกนเท่านั้น
ตารางแสดงการทำงานของคำสั่ง OSF
ตารางแสดงการกำหนดแอดเดรสที่สามารถกำหนดได้และชนิดของไฟล์ของคำสั่ง OSR และ OSF
- MicroLogix? 1200 and MicroLogix 1500 Programmable Controllers Bulletins 1762 and 1764 Instruction Set Reference Manual, Rockwell Automation Technologies, Inc.
- RSLogix 500 GETTING RESULTS GUIDE, Rockwell Automation Technologies, Inc.
- MicroLogix 1200 Programmable Controllers Bulletin 1762 Controllers and Expansion I/O User Manual, Rockwell Automation Technologies, Inc
สงวนลิขสิทธิ์ ตามพระราชบัญญัติลิขสิทธิ์ พ.ศ. 2539 www.thailandindustry.com
Copyright (C) 2009 www.thailandindustry.com All rights reserved.
ขอสงวนสิทธิ์ ข้อมูล เนื้อหา บทความ และรูปภาพ (ในส่วนที่ทำขึ้นเอง) ทั้งหมดที่ปรากฎอยู่ในเว็บไซต์ www.thailandindustry.com ห้ามมิให้บุคคลใด คัดลอก หรือ ทำสำเนา หรือ ดัดแปลง ข้อความหรือบทความใดๆ ของเว็บไซต์ หากผู้ใดละเมิด ไม่ว่าการลอกเลียน หรือนำส่วนหนึ่งส่วนใดของบทความนี้ไปใช้ ดัดแปลง โดยไม่ได้รับอนุญาตเป็นลายลักษณ์อักษร จะถูกดำเนินคดี ตามที่กฏหมายบัญญัติไว้สูงสุด




