
เราได้ทราบปัจจัยในการพิจารณาขนาดพิกัดของเครื่องกำเนิดไฟฟ้าตามต้องการแล้ว
การใช้เครื่องกำเนิดไฟฟ้าสำหรับโรงงานอุตสาหกรรม (ตอนที่ 2)
(Using Generator Sets in Industrials)
สุชาติ ปรีชาธร
suchart.pr@egat.co.th
ระบบควบคุมเครื่องกำเนิดไฟฟ้า (Generator Control Systems)
ในบทความตอนที่ 1 เราได้ทราบปัจจัยในการพิจารณาขนาดพิกัดของเครื่องกำเนิดไฟฟ้าตามต้องการแล้ว เราจะต้องเลือกพิกัดเครื่องกำเนิดไฟฟ้าจากบริษัทผู้ผลิตตามตัวอย่างในตาราง และการทำความรู้จักกับเครื่องกำเนิดไฟฟ้าแบบซิงโครนัสจะทำให้เราสามารถทำความเข้าใจระบบควบคุมการทำงานของเครื่องกำเนิดไฟฟ้าตามความต้องการใช้งานได้ดีขึ้น เมื่อกล่าวถึงระบบควบคุมเครื่องกำเนิดไฟฟ้าเรามักจะหมายถึง การควบคุมแรงดันไฟฟ้า (Voltage Regulator) การควบคุมความถี่ไฟฟ้าหรือความเร็วรอบ (Frequency หรือ Speed Control) และการควบคุมการจ่ายกำลังไฟฟ้าของชุดเครื่องกำเนิดไฟฟ้าหลายเครื่อง (Load Sharing Control) รวมทั้งการควบคุมการแบ่งจ่ายกำลังไฟฟ้า (Generator Loading Control) เมื่อมีการขนานเครื่องกำเนิดไฟฟ้าเข้ากับระบบไฟฟ้าของการไฟฟ้า เป็นต้น
การเลือกขนาดพิกัดของเครื่องกำเนิดไฟฟ้า สามารถพิจารณาได้จากตารางที่ 1 และ 2 นอกจากนี้ผู้ออกแบบจะต้องทราบค่า Reactive and Active Power ของภาระไฟฟ้าที่จะต่ออยู่กับเครื่องกำเนิดไฟฟ้าด้วย เนื่องจากเครื่องกำเนิดไฟฟ้าไม่สามารถจ่ายกำลังไฟฟ้าได้ตามพิกัด KVA ได้ทุกค่า Power Factor ของภาระไฟฟ้าทั้งหมด เนื่องจากมีข้อจำกัดหลายประการ
ตารางที่ 1 แสดงพิกัดกำลังไฟฟ้าของ Diesel Engine Generator Set ของบริษัท CATERPILLAR
.jpg)
ตารางที่ 2 แสดงพิกัดกำลังไฟฟ้าของ GAS Engine Generator Set ของบริษัท CATERPILLAR
.jpg)
ขอบเขตจำกัดการจ่ายกำลังไฟฟ้าของเครื่องกำเนิดไฟฟ้า (Synchronous Generator's Capability Limits)
- ข้อจำกัดความร้อนของขดลวดสนามไฟฟ้ากระตุ้น (Field Heating Limit) จะทำให้ไม่สามารถป้อนการแสไฟฟ้าได้เพิ่มขึ้น เพราะจะทำให้ฉนวนไฟฟ้าเกิดความเสียหายได้ ข้อจำกัดนี้จะทำให้ขอบเขตจำกัดการจ่ายกำลังไฟฟ้าเสมือน (Reactive Power) ของเครื่องกำเนิดไฟฟ้า
- ข้อจำกัดความร้อนของขดลวดอยู่กับที่ (Armature Heating Limit) จะทำให้ไม่สามารถป้อนกระแสไฟฟ้าได้เพิ่มขึ้น เพราะจะทำให้ฉนวนไฟฟ้าเกิดความเสียหายได้ ข้อจำกัดนี้จะทำให้ขอบเขตจำกัดการจ่ายกำลังไฟฟ้าปรากฏ (Apparent Power) ของเครื่องกำเนิดไฟฟ้า
- ข้อจำกัดกระแสกระตุ้นต่ำสุด (Under-Excitation Limit) จะทำให้ไม่สามารถป้อนการแสไฟฟ้าได้ลดลง เพราะจะทำให้การเดินเครื่องกำเนิดไฟฟ้าไม่มีเสถียรภาพ (Stability) เพียงพอ และจะต้องดึงกำลังไฟฟ้าเสมือนจากระบบไฟฟ้าเข้ามาเพื่อรักษา Air-Gap Flux ให้เพียงพอ จนเกิดความร้อนสูงที่ขดลวดอยู่กับที่
- ข้อจำกัดของกำลังขับของเครื่องต้นกำลัง (Prime Mover Limit)
.jpg)
รูปที่ 19 แสดงลักษณะ Generator Capability Curve
การควบคุมค่าแรงดันไฟฟ้าของเครื่องกำเนิดไฟฟ้า (Generator Voltage Regulator)
แรงดันไฟฟ้าของเครื่องกำเนิดไฟฟ้า (Generator Voltage) เกิดขึ้นจากสนามแม่เหล็กเหนี่ยวนำ (Electro Magnetic Induction) โดยมีความสัมพันธ์ คือ เมื่อ E คือ ค่าแรงดันไฟฟ้าเหนี่ยวนำ (( คือ ค่าเปลี่ยนแปลงค่าความเข้มของเส้นแรงแม่เหล็ก (Flux Density) และ t คือ ค่าช่วงเวลา
.jpg)
รูปที่ 20 แสดงการเกิดแรงดันไฟฟ้าเหนี่ยวนำ เมื่อขดลวดหมุนตัดสนามแม่เหล็ก
จากรูปที่ 20 จะเห็นว่าการเปลี่ยนแปลงค่าความเข้มสนามแม่เหล็กจะน้อยที่สุดเมื่อขดลวดทำมุมตั้งฉากกับเส้นแรงแม่เหล็ก แต่การเปลี่ยนแปลงค่าความเข้มเส้นแรงแม่เหล็กจะมากที่สุดเมื่อขดลวดทำมุมขนานกับเส้นแรงแม่เหล็ก จึงทำให้เกิดแรงดันไฟฟ้าเป็นรูป Sine Wave และถ้าเราเพิ่ม-ลดค่าความเข้มสนามแม่เหล็ก โดยให้อัตราเร็วของการหมุนของขดลวดคงที่ ก็จะทำให้ค่าแรงดันไฟฟ้าเหนี่ยวนำที่เกิดขึ้นในขดลวด เพิ่มขึ้น-ลดลง ด้วยเช่นกัน
เครื่องกำเนิดไฟฟ้า จะประกอบด้วยขดลวดอยู่กับที่ (Stationary Armature Winding หรือ Stator) ซึ่งจะวางอยู่ใน Slotted Laminated Steel Core และขดลวดไฟฟ้ากระแสตรงบนแกนหมุน (Rotor) ซึ่งจะใช้สร้างสนามแม่เหล็กหมุน (Revolving DC Field) เมื่อมีแหล่งจ่ายไฟฟ้ากระแสตรงต่อกับขดลวดของโรเตอร์จะทำให้เกิดสนามแม่เหล็กขึ้น (Magnetic Flux) และเมื่อทำการขับหมุนโรเตอร์ ก็จะทำให้เกิดการเปลี่ยนแปลงค่าความเข้มสนามแม่เหล็กที่ผ่านขดลวดอยู่กับที่ จนเกิดแรงดันไฟฟ้าเหนี่ยวนำขึ้นในขดลวดอยู่กับที่
และถ้าทำการต่อขั้วไฟฟ้าของขดลวดเข้ากับเครื่องใช้ไฟฟ้า ก็จะเกิดกระแสไฟฟ้าไหลในวงจรไฟฟ้า ไฟฟ้ากระแสตรงที่ป้อนเข้าสู่ขดลวดบนโรเตอร์สามารถใช้จากแหล่งจ่ายภายนอก หรือสร้างขึ้นพร้อม ๆ กับการขับหมุนโรเตอร์ก็ได้ ในรูปที่ 22 และ 23 จะแสดงตัวอย่างของ Permanent Magnet Generator (PMG) ซึ่งจะเป็นเครื่องกำเนิดไฟฟ้าขนาดเล็กที่ต่ออยู่ในแกนเดียวกับโรเตอร์ เพื่อทำหน้าที่เป็นแหล่งจ่ายไฟฟ้ากระแสสลับผ่าน Rotating Rectifier จนได้ไฟฟ้ากระแสตรงเพื่อป้อนให้กับขดลวดบนโรเตอร์
.jpg)
รูปที่ 21 แสดงลักษณะโครงสร้างของ Main Stator จะต้องออกแบบ Stator Coil Pitch เพื่อลด Harmonic ให้มากที่สุด
.jpg)
รูปที่ 22 แสดงตัวอย่างผังวงจรการสร้าง Revolving DC Field โดยใช้ Permanent Magnet Generator
.jpg)
รูปที่ 23 แสดงลักษณะโครงสร้างของ Rotor ชนิด Salient Pole ต่อแกนเดียวกับ Permanent Magnet Generator
ในกรณีที่เครื่องกำเนิดไฟฟ้าจ่ายกำลังไฟฟ้าโดยลำพัง (Islanding Operation) แรงดันไฟฟ้าของเครื่องกำเนิดไฟฟ้าจะเปลี่ยนแปลงไปตามขนาดภาระไฟฟ้าที่ต่ออยู่ ถ้าภาระไฟฟ้าที่เป็น Inductive Load มีค่ามากขึ้นจะทำให้ระดับแรงดันไฟฟ้าตกลง แต่ถ้าใช้เครื่องกำเนิดไฟฟ้าจ่ายกำลังไฟฟ้าร่วมกับการไฟฟ้า (Parallel Generator) ระดับแรงดันไฟฟ้าที่ขั้วของเครื่องกำเนิดไฟฟ้าจะแปรเปลี่ยนตามค่าแรงดันไฟฟ้าของการไฟฟ้า (โดยพิจารณาว่าเครื่องกำเนิดไฟฟ้ามีขนาดเล็กมากเมื่อเทียบกับระบบไฟฟ้าของการไฟฟ้า)
อุปกรณ์ควบคุมแรงดันไฟฟ้าอัตโนมัติ (Automatic Voltage Regulator)
สำหรับเครื่องกำเนิดไฟฟ้าที่ทำหน้าที่จ่ายไฟฟ้าในกรณีฉุกเฉิน ทันทีที่เครื่องยนต์สตาร์ท ความเร็วรอบของเครื่องยนต์จะเพิ่มขึ้นจนถึงพิกัดในเวลาอันสั้น ตามรูปที่ 24 อุปกรณ์ตรวจวัดความเร็วรอบ (Speed Switch) จะทำการต่อวงจรการทำงานของอุปกรณ์ควบคุมแรงดันไฟฟ้าอัตโนมัติ จากนั้นอุปกรณ์ควบคุมแรงดันไฟฟ้าจะทำการตรวจสอบระดับแรงดันไฟฟ้าของเครื่องกำเนิดไฟฟ้าตามรูปที่ 25 เพื่อเปรียบเทียบกับค่าที่ปรับตั้งไว้ (Reference Voltage: Vref) และทำการปรับเปลี่ยนค่ากระแสกระตุ้น (Field Current)
จนกระทั่งแรงดันไฟฟ้าของเครื่องกำเนิดไฟฟ้ามีค่าเท่ากับค่าที่กำหนดไว้ อุปกรณ์ควบคุมแรงดันไฟฟ้านี้จะหมดหน้าที่เมื่อ เครื่องกำเนิดไฟฟ้าเข้าสู่ช่วงเวลาการ Cool Down ซึ่งความเร็วรอบจะอยู่ในระดับ Idle Speed ทำให้ Speed Switch ตัดวงจรการทำงานของอุปกรณ์ควบคุมแรงดันไฟฟ้า ปกติจะตั้งค่าการทำงานของ Speed Switch ไว้ต่ำกว่าค่า 80% ของพิกัดความเร็วรอบ
.jpg)
รูปที่ 24 แสดงการเปลี่ยนแปลงระดับแรงกันไฟฟ้าของเครื่องกำเนิดไฟฟ้าเมื่อทำการสตาร์ท
.jpg)
รูปที่ 25 แสดงการต่อวงจรใช้งานของ Automatic Voltage Regulator
การทำงานของ Automatic Voltage Regulator ในปัจจุบันจะมีอยู่ 3 mode สำหรับการควบคุม Excitation คือ (1) การควบคุมแรงดันไฟฟ้าอัตโนมัติตามค่าที่ปรับตั้งไว้ (AVR) (2) การควบคุมกระแสกระตุ้น (Filed Current Regulation: FCR) (3) การควบคุมแรงดันไฟฟ้าด้วยมือ (Manual Voltage Control: MVC) ทั้งสามโหมดนี้ใช้ได้กับ Static Exciter System และ Rotating Exciter System โหมดการควบคุมด้วยมือค่อนข้างยุ่งยาก มักจะใช้ในกรณีที่ AVR มีปัญหาหรือทำงานผิดปกติ จึงต้องทำการปรับกระแสกระตุ้นและสังเกตระดับแรงดันไฟฟ้าตามต้องการ
การเปลี่ยนแปลงภาระไฟฟ้าขนาดใหญ่อย่างฉับพลัน (Block Load Change) จะทำให้เกิดแรงดันไฟฟ้าตก (Voltage Depression) เนื่องจากกระแสไฟฟ้าที่เพิ่มขึ้นจะทำให้เกิด Voltage Drop ที่ Generator Reactance(Xs) มากขึ้น ถ้า Generator Excitation ยังคงไม่เปลี่ยนแปลงหลังจากมีภาระไฟฟ้าเพิ่มขึ้น แรงดันไฟฟ้าจะตกลง (Sag Away) โดยขึ้นกับค่า Subtransient Reactance (Xd'') ของเครื่องกำเนิดไฟฟ้า แต่ทันทีที่แรงดันไฟฟ้าเบี่ยงเบนจากค่าปกติ Automatic Voltage Regulator จะปรับเพิ่ม Field Current และทำให้แรงดันไฟฟ้าเพิ่มขึ้น แต่แรงดันไฟฟ้าจะเพิ่มขึ้นมากกว่าค่าที่ต้องการ (Overshoot) ทำให้ต้องมีการปรับเปลี่ยนค่า Field Current จนกระทั่งแรงดันไฟฟ้าเป็นไปตามค่าที่กำหนดไว้ ความไวของการตอบสนองต่อการเปลี่ยนแปลงแรงดันไฟฟ้าของ AVR จะสามารถปรับค่าได้จาก Voltage Gain Potentiometer
.jpg)
รูปที่ 26 แสดงลักษณะแรงดันไฟฟ้าของเครื่องกำเนิดไฟฟ้าเมื่อขนาดภาระไฟฟ้าเปลี่ยนแปลง
ในกรณีที่เครื่องกำเนิดไฟฟ้าต้องจ่ายกำลังไฟฟ้าให้กับมอเตอร์ไฟฟ้าขนาดใหญ่ ทันทีที่มอเตอร์สตาร์ท แรงดันไฟฟ้าของเครื่องกำเนิดไฟฟ้าจะตกลง เนื่องจากมอเตอร์มีค่า PF ค่อนข้างน้อย และจึงต้องการค่า Reactive Power (VAR) มากจนอุปกรณ์ควบคุมแรงดันไฟฟ้าไม่สามารถตอบสนองได้ทัน ถ้ามอเตอร์นี้มีขนาดใหญ่มาก แรงดันไฟฟ้าอาจตกลงจนไม่สามารถสตาร์ทมอเตอร์ได้สำเร็จ ตามรูปที่ 27 และ 28
.jpg)
รูปที่ 27 แสดงการจ่ายภาระไฟฟ้าที่เป็นมอเตอร์ขนาดใหญ่หลายวงจร
.jpg)
รูปที่ 28 แสดงการเปลี่ยนแปลงค่าแรงดันและกระแสไฟฟ้าของเครื่องกำเนิดไฟฟ้า เมื่อต่อวงจรภาระไฟฟ้าขนาดใหญ่
เมื่อเครื่องกำเนิดไฟฟ้าที่มีการรับภาระไฟฟ้าขนาดใหญ่ จะทำให้ความเร็วรอบลดลง และอาจทำให้ระดับแรงดันไฟฟ้าลดลงไปพร้อมกัน ความเร็วรอบของโรเตอร์ที่ลดลงจะส่งผลให้ค่าแรงดันไฟฟ้าเหนี่ยวนำลดลงไปอีก AVR จะพยายามปรับเพิ่มค่าแรงดันไฟฟ้าให้กลับสู่ค่าอ้างอิง จึงทำการเพิ่มกระแสกระตุ้น และถ้าเครื่องยนต์ไม่สามารถเพิ่มกำลังขับหมุนได้ทัน ก็จะทำให้กระแสกระตุ้นมีค่าเพิ่มขึ้นจนเกิด Over-Excitation ดังนั้น อุปกรณ์ควบคุมแรงดันไฟฟ้าอัตโนมัติ จึงควรมีฟังก์ชัน Volt-per-Hertz Limiter เพื่อควบคุมให้ค่าระดับแรงดันไฟฟ้าและความถี่ไฟฟ้ามีการเปลี่ยนแปลงไปตามสัดส่วนที่กำหนดไว้
.jpg)
รูปที่ 29 แสดงการเปลี่ยนแปลงแรงดันไฟฟ้าและความถี่ไฟฟ้า เมื่อพยายามรักษาแรงดันไฟฟ้าให้คงที่
.jpg)
รูปที่ 30 แสดงการเปลี่ยนแปลงแรงดันไฟฟ้าและความถี่ไฟฟ้า เมื่อควบคุมให้แรงดันไฟฟ้าและความถี่ไฟฟ้าเปลี่ยนแปลงด้วยสัดส่วนคงที่
.jpg)
รูปที่ 31 แสดงการใช้ฟังก์ชัน Under-Frequency Limit หรือ Volt-per-Hertz เมื่อค่าความถี่ไฟฟ้าต่ำกว่าที่กำหนด
เครื่องกำเนิดไฟฟ้าที่มีการขนานเข้ากับระบบไฟฟ้าหลัก มักจะมีการใช้ AVR ซึ่งมีฟังก์ชัน Reactive Voltage Droop Compensation โดยการเพิ่ม Current Transformer ซึ่งเรียกว่า Droop CT ตามรูปที่ 32 เพื่อวัดค่ากระแสไฟฟ้าของภาระไฟฟ้า เมื่อนำองค์ประกอบของกระแสและแรงดันไฟฟ้ามาใช้ร่วมกันในวิเคราะห์ และทำการชดเชยค่า Reactive Power
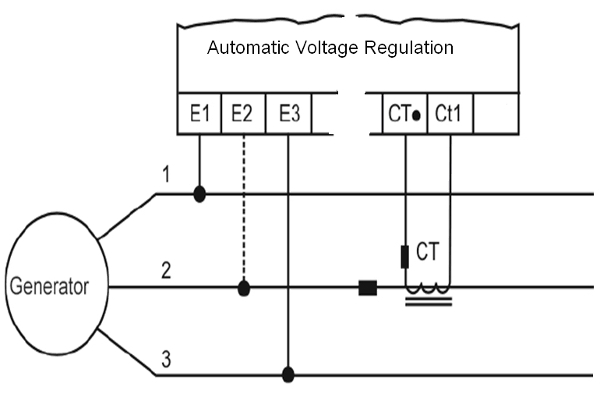
รูปที่ 32 แสดงการใช้ Droop CT สำหรับฟังก์ชัน Reactive Voltage Droop Compensation
ในกรณีที่ภาระไฟฟ้าเป็น Resistive Load (Unity Power Factor) สัญญาณแรงดันและสัญญาณกระแสไฟฟ้าจะมีมุมเฟสต่างกัน 90O เมื่อนำมารวมกัน สัญญาณแรงดันไฟฟ้าจึงแทบไม่เปลี่ยนแปลงจากค่าอ้างอิง AVR จึงไม่มีการเปลี่ยนแปลงค่ากระแสกระตุ้น ทำให้แรงดันไฟฟ้าของเครื่องกำเนิดไฟฟ้าไม่เปลี่ยนแปลงเมื่อภาระไฟฟ้าเปลี่ยนแปลง
ในกรณีที่ภาระไฟฟ้าเป็น Inductive Load (Lagging Power Factor) สัญญาณแรงดันและสัญญาณกระแสไฟฟ้าจะมีมุมเฟสต่างกันน้อยกว่า 90O (สัญญาณทั้งสอง in phase กันบางส่วน) เมื่อนำมารวมกัน สัญญาณแรงดันไฟฟ้าจึงมีค่ามากกว่าค่าอ้างอิง AVR จึงทำการลดค่ากระแสกระตุ้น ทำให้เครื่องกำเนิดไฟฟ้าจ่ายกำลังไฟฟ้าเสมือน (VAR) น้อยลง และช่วยปรับปรุงค่า Power Factor ให้เข้าใกล้ค่า Unity มากขึ้น
ในกรณีที่ภาระไฟฟ้าเป็น Capacitive Load (Leading Power Factor) สัญญาณแรงดันและสัญญาณกระแสไฟฟ้าจะมีมุมเฟสต่างกันมากกว่า 90O (สัญญาณทั้งสอง out of phase กันบางส่วน) เมื่อนำมารวมกัน สัญญาณแรงดันไฟฟ้าจึงมีค่าน้อยกว่าค่าอ้างอิง AVR จึงทำการเพิ่มค่ากระแสกระตุ้น ทำให้เครื่องกำเนิดไฟฟ้าจ่ายกำลังไฟฟ้าเสมือน (VAR) เพิ่มขึ้น น้อยลง และช่วยปรับปรุงค่า Power Factor ให้เข้าใกล้ค่า Unity มากขึ้น
ในกรณีที่มีการขนานเครื่องกำเนิดไฟฟ้ากับการไฟฟ้า (Utility Grid) เราสามารถควบคุมค่ากำลังไฟฟ้าเสมือน(Reactive Power: VAR) หรือค่าเพาเวอร์แฟกเตอร์ (PF) ได้โดยการติดตั้งอุปกรณ์ VAR or PF Controller การปรับเพิ่ม VAR หรือ ควบคุมค่า PF ให้เข้าใกล้ค่า Unity Power Factor (PF = 1) ก็คือการปรับเพิ่มกระแสกระตุ้น ทำให้ค่าแรงดันไฟฟ้าเหนี่ยวนำ (Ea) มีค่าเพิ่มขึ้น สำหรับเครื่องกำเนิดไฟฟ้าขนาดเล็กที่ต่ออยู่กับระบบไฟฟ้าขนาดใหญ่ ค่า Ea ที่เพิ่มขึ้นจะไม่ทำให้แรงดันไฟฟ้าที่ Grid เกิดการเปลี่ยนแปลง แต่การควบคุมค่า VAR สำหรับเครื่องไฟฟ้าขนาดใหญ่ของโรงไฟฟ้าจะไม่นิยมให้ใช้ เพราะโรงไฟฟ้าขนาดใหญ่จะต้องทำหน้าที่รักษาระดับแรงดันไฟฟ้าให้เป็นไปตามปกติ
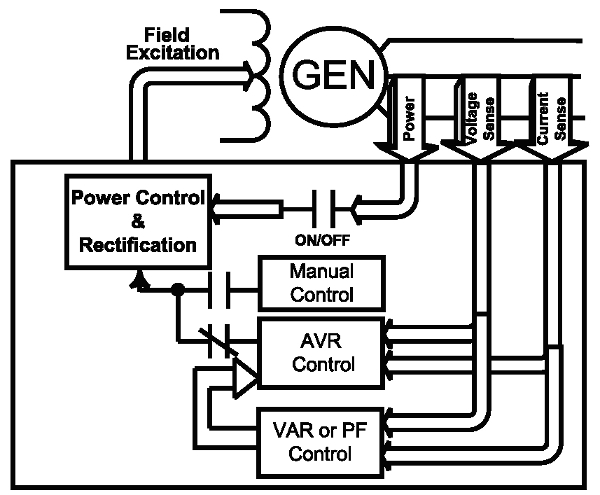
รูปที่ 33 แสดงวงจรการควบคุมแรงดันไฟฟ้าของ Automatic Voltage Regulator
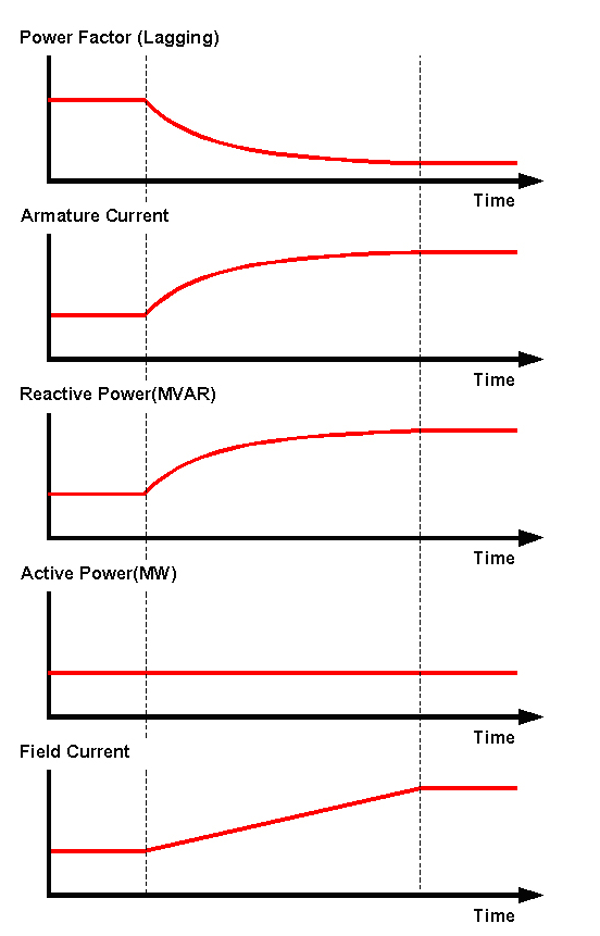
รูปที่ 34 แสดงค่าตัวแปรต่าง ๆ ของเครื่องกำเนิดไฟฟ้า เมื่อมีการปรับเปลี่ยน Field Current
การขนานเครื่องกำเนิดไฟฟ้าเข้ากับระบบของการไฟฟ้าซึ่งมีระดับแรงดันเปลี่ยนแปลงได้จากการเปลี่ยนแปลงภาระไฟฟ้าที่ต่ออยู่ในระบบ จะทำให้ AVR ปรับค่ากระแสกระตุ้นสูงเกินกว่าค่า Maximum Rated Field Current เครื่องกำเนิดไฟฟ้าอาจมีการจ่ายกำลังไฟฟ้าเสมือนเกินพิกัด จนเกิดความร้อนสูงที่ขดลวดสนามกระตุ้นบนโรเตอร์ ความร้อนที่เกิดขึ้นจะค่อย ๆ เกิดขึ้นอย่างฉับพลัน แต่ถ้าปล่อยไว้นานอาจทำความเสียหายให้กับฉนวนไฟฟ้าได้ ด้วยเหตุนี้ ผู้ใช้งานจึงควรสอบถามข้อมูลของ Field Thermal Characteristic จากผู้ผลิตเครื่องกำเนิดไฟฟ้า เพื่อจะได้ทราบขีดจำกัดการทำงานของเครื่องกำเนิดไฟฟ้า (Generator Capability Curve)
กรณีการขนานเครื่องกำเนิดไฟฟ้าเข้ากับระบบไฟฟ้าหลัก เมื่อทำการลดกระแสกระตุ้น เครื่องกำเนิดไฟฟ้าจะจ่ายกำลังไฟฟ้าเสมือนลดลง และถ้ายังคงลดกระแสกระตุ้นต่อไป เครื่องกำเนิดไฟฟ้าจะเปลี่ยนมาเป็นฝ่ายรับกำลังไฟฟ้าเสมือนจากระบบไฟฟ้า การป้อนกระแสกระตุ้นน้อยเกินไป (Under Excitation) จะทำให้โรเตอร์หมุนตามสนามไฟฟ้าจากขดลวดอยู่กับที่ไม่ทัน จึงเกิด Loss of Synchronism เนื่องจากการซิงโครไนซ์ระหว่างโรเตอร์และสเตเตอร์ จะขึ้นอยู่กับแรงดึงดูดของสนามไฟฟ้าหมุน หลังจากโรเตอร์สูญเสียการซิงโครไนซ์ จะเกิด Slip Poles และเกิด Out of Step จนทำให้เครื่องกำเนิดไฟฟ้าเกิดความเสียหายทางกลได้
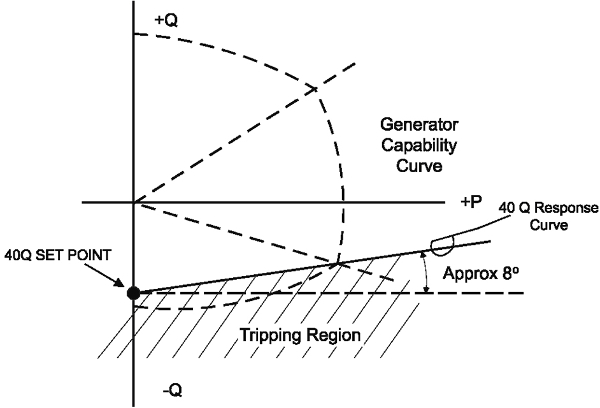
รูปที่ 35 แสดงการใช้รีเลย์ Loss of Field (40Q) เพื่อป้องกันปัญหาจาก Underexcitation
AVR จะตรวจสอบระดับแรงดันไฟฟ้าจากเครื่องกำเนิดไฟฟ้าจาก Potential Transformer (PT) ซึ่งจะมีฟิวส์เพื่อป้องกันวงจรอยู่ ถ้าฟิวส์ขาด AVR จะพบว่าระดับแรงดันไฟฟ้าต่ำกว่าที่ที่ปรับตั้งไว้ จึงทำให้เกิดปัญหา Overexcitation อย่างร้ายแรง ปัญหานี้มักมีการแก้ไขในการผลิตไฟฟ้าของการไฟฟ้า โดยการใช้ PT สองชุด พร้อมกับใช้ Voltage Balance Relay (60) เพื่อตรวจสอบว่าสัญญาณไฟฟ้าจาก PT ชุดใดชุดหนึ่งหายไปหรือไม่ แต่สำหรับเครื่องไฟฟ้าขนาดเล็กมักไม่มีการป้องกันปัญหานี้เนื่องจากมีค่าใช้จ่ายเพิ่มมาก วิธีหนึ่งที่มีค่าใช้จ่ายไม่สูงนักแต่น่าจะแก้ปัญหาได้ ก็คือ การใช้ MCB ที่มี Auxiliary Contact หรือ Undervoltage Relay (27) เพื่อใช้ส่งสัญญาณบอกให้ระบบควบคุมทำการเปลี่ยนโหมดการทำงานของ AVR มาเป็นแบบ Manual
สงวนลิขสิทธิ์ ตามพระราชบัญญัติลิขสิทธิ์ พ.ศ. 2539 www.thailandindustry.com
Copyright (C) 2009 www.thailandindustry.com All rights reserved.
ขอสงวนสิทธิ์ ข้อมูล เนื้อหา บทความ และรูปภาพ (ในส่วนที่ทำขึ้นเอง) ทั้งหมดที่ปรากฎอยู่ในเว็บไซต์ www.thailandindustry.com ห้ามมิให้บุคคลใด คัดลอก หรือ ทำสำเนา หรือ ดัดแปลง ข้อความหรือบทความใดๆ ของเว็บไซต์ หากผู้ใดละเมิด ไม่ว่าการลอกเลียน หรือนำส่วนหนึ่งส่วนใดของบทความนี้ไปใช้ ดัดแปลง โดยไม่ได้รับอนุญาตเป็นลายลักษณ์อักษร จะถูกดำเนินคดี ตามที่กฏหมายบัญญัติไว้สูงสุด




