âĘĂѵÂě ÍŘąËĐÇĂҡĂ
ÍŔÔĂѡÉě ąŇÁá¶č§
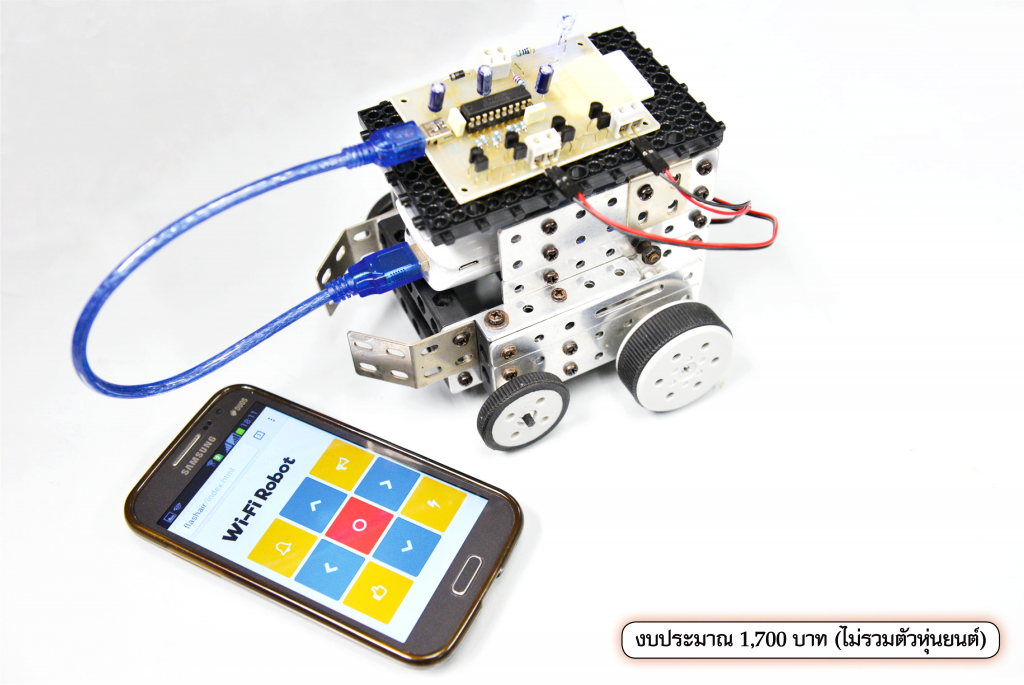
ăąâ¤Ă§§ŇąąŐéŕĂҨĐÁŇĘĂéҧËŘčąÂąµě˘ąŇ´ŕĹ硷ŐčĘŇÁŇö¤Çş¤ŘÁˇŇ÷ӧҹ¨ŇˇĂĐÂĐäˇĹä´éâ´ÂĽčŇą Wi-Fi â´ÂˇŇĂąÓŕÍŇ Toshiba FlashAir SD Wi-Fi card áĹпѧˇěŞŃąˇŇ÷ӧҹ·ŐčĽŮéĽĹÔµ ¤×Í Toshiba ä´éŕ»Ô´Şčͧ·Ň§äÇéăËéĘÓËĂŃşąŃˇľŃ˛ąŇ㹡ŇĂąÓä»ăŞé§Ňą ĘĂéҧˇŃąĘąŘˇć ŕÍŇäÇéŕĹčąăąÇŃąÇčҧ ËĂ×ͨдѴá»Ĺ§ä»ăŞéˇŃş§ŇąÍ×čąć ˇç·Óä´éŕŞčąˇŃą¤ĂŃş
â¤Ă§§ŇąąŐéŕ»çąˇŇĂ·´ĹͧĘĂéҧËŘčąÂąµěşŃ§¤Ńş˘ąŇ´ŕĹçˇ ´éÇ¡ŇèѺŕÍŇâÁŕ´ĹËŘčąÂąµě T.O.P ŞŘ´¤ÔµËŘčąÂąµěŕľ×č͡ŇĂČÖˇÉŇ «Ö觻Ѩ¨ŘşŃą SE-ED iKids ŕ»çąĽŮé¨ÓËąčŇ ąÓÁҵčÍ»ĂСͺŕ˘éҡѺ Toshiba FlashAir «Öč§ŕ»çą SD Wi-Fi card şÇˇ´éÇ¡ŇĂŧÁ×ÍĘĂéҧ »ĂСͺǧ¨Ă áĹСŇĂŕ˘ŐÂą«ÍżµěáÇĂěÍŐˇąÔ´ËąčÍ â´ÂŕĂŇĘŇÁŇö¨Đ¤Çş¤ŘÁˇŇ÷ӧҹ˘Í§ŕ¨éŇËŘčąÂąµě·ŐčÇčŇąŐéáşşäĂéĘŇÂä´éâ´ÂĽčŇą ĘÁŇĂě·âżą á·çşŕĹçµ ĘĂéҧˇŃąĘąŘˇć ŕÍŇäÇéŕĹčąăąÇŃąÇčҧ ËĂ×ͨдѴá»Ĺ§ä»ăŞéˇŃş§ŇąÍ×čą·ŐčµčҧÍ͡仡ç·Óä´éŕŞčąˇŃą
FlashAir ÍŃą·Őč¨ĂÔ§áĹéǡç¤×Í SDHC Memory Card ·ŐčÍ͡ẺÁŇăËéĘŇÁŇöŕŞ×čÍÁŕ˘éҡѺ Wi-Fi ä´é´éÇ ˇŇĂăŞé§Ňąâ´Â·ŃčÇä»ŕĂҡç¨ĐąÓÁŇ FlashAir ÁŇŕĘŐÂşŕ˘éҡѺÍŘ»ˇĂłěÍÂčҧ ˇĹéͧ´Ô¨Ô·ŃĹ ŕľ×čÍăËéĘŇÁŇöŕ˘éҶ֧ĂŮ»¶čŇ·ŐčŕˇçşÍÂŮčăąËąčǤÇŇÁ¨Ó˘Í§ˇŇĂě´ä´éâ´ÂäÁčµéͧ¶Í´Í͡ÁŇŕĘŐÂşŕ˘éҡѺŕ¤Ă×čͧ¤ÍÁľÔÇŕµÍĂě 㹢łĐŕ´ŐÂǡѹ Toshiba ŕͧˇçŕ»Ô´ŞčͧĘÓËĂŃşąŃˇľŃ˛ąŇ㹡ŇĂąÓ FlashAir ä»ăŞé»ĂĐÂءµěŕ˘éҡѺ§ŇąÍ×čąć ·Őčʹء˘Öéąä´é´éÇ «Öč§ŕĂҨйÓĘčÇą·ŐčÇčŇąŐéÁŇăŞéĘĂéҧŞŘ´¤Çş¤ŘÁËŘčąÂąµě˘Í§ŕĂŇąŃčąŕͧ ÍҨÁŐ¤Ó¶ŇÁÇčŇ FlashAir ĘŇÁŇö·ÓÍĐäĂä´éşéҧ? ĂŮ»·Őč 1 ąčҨЪčÇÂŕ»çą¤ÓµÍşä´é´Ő·Őŕ´ŐÂÇ ËĂ×ͶéҨĐĘĂŘ»ÍÂčҧ§čŇÂć ˇç¤×Í ĘŇÁŇö·Óä´é 4 ÍÂčҧ ä´éáˇč
ăąâ¤Ă§§ŇąąŐéŕĂŇä´éăŞé¤ÇŇÁĘŇÁŇöŕˇ×Íş·Ńé§ 4 ÍÂčҧŕĹ ¡ŕÇ鹡çá¤čŕĂ×čͧʤĂÔ»ŔŇÉŇ Lua ŕ·čŇąŃéąŕͧ
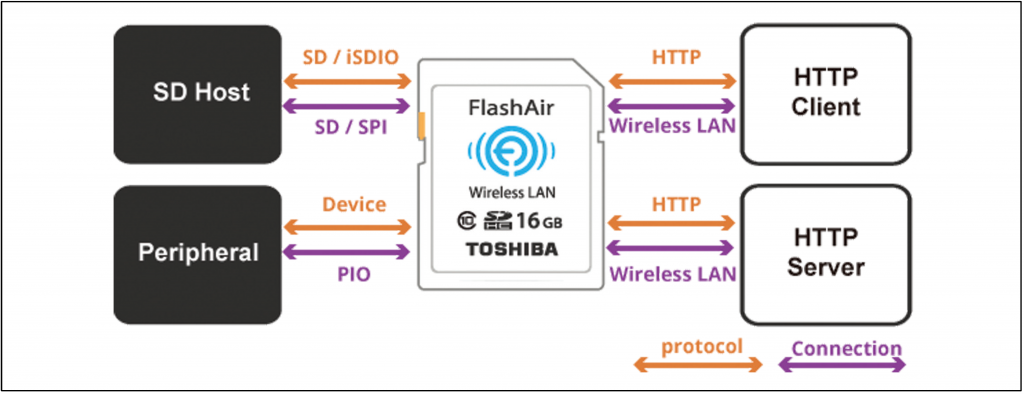
ĂŮ»·Őč 1 ä´ÍĐáˇĂÁ·Őč¨Đ͸ԺŇÂÍÂčҧ§čŇÂć ÇčŇ FlashAir ĘŇÁŇöăŞé·ÓÍĐäĂä´éşéҧ
ĂŮ»·Őč 2 ͧ¤ě»ĂСͺˇŇ÷ӧҹ˘Í§ËŘčąÂąµě
ĘčÇąÎŇĂě´áÇĂě
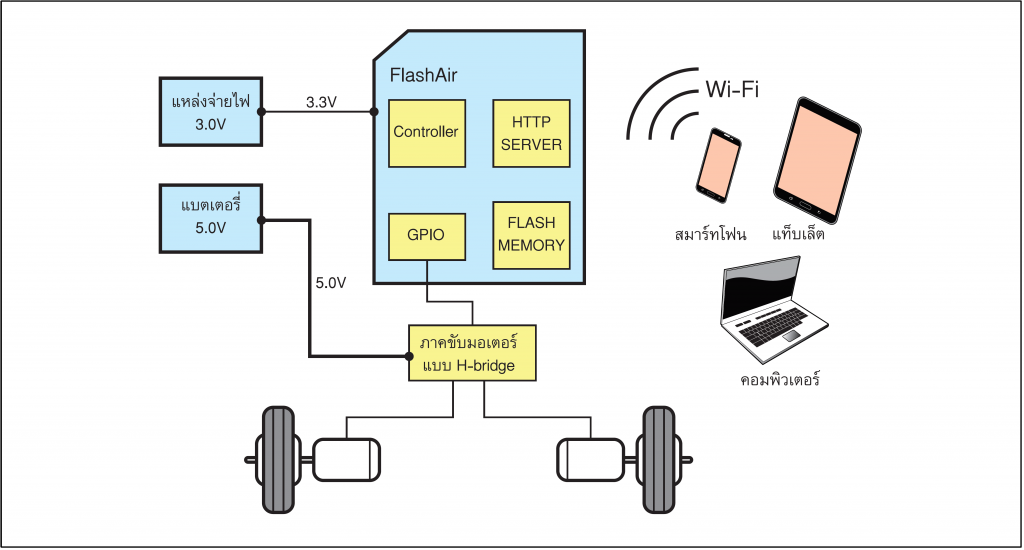
ĂŮ»·Őč 2 ŕ»çąáĽąĽŃ§ĘčÇąˇŇ÷ӧҹ˘Í§ËŘčąÂąµě ·ŐčÁŐ FlashAir ŕ»çąËŃÇă¨ËĹѡ˘Í§ˇŇäǺ¤ŘÁ â´Â FlashAir ¨Đ·Ó§Ňąŕ»çą·Ńé§ Web server áĹĐ Wireless AP (Access Point) ăËéˇŃşĘÁŇĂě·âżąËĂ×Íá·çşŕĹçµŕŞ×čÍÁµčÍŕ˘éŇÁŇĽčŇą·Ň§ Wi-Fi ąŃčąŕͧ ŕÁ×čÍĘÁŇĂě·âżąŕŞ×čÍÁˇŃş FlashAir ä´éĘÓŕĂç¨ áĹĐŕ»Ô´ËąéŇྨ http://flashair/index.html («Ö觡ç¤×ÍËąéҢͧŕÇçşŕľ¨·Őč¶ŮˇşŃą·Öˇşą FlashAir ąŃčąŕͧ «Ö觨ТÍŕĹčŇĂŇÂŕÍŐ´Áҡ˘ÖéąăąËŃǢéͶѴ令ĂŃş) ĽčŇą·Ň§ŕÇçşşĂŇÇŕ«ÍĂě ྨ·ŐčáĘ´§˘ÖéąÁŇ ¤×Í ĘčÇą¤ŃąşŃ§¤Ńş ·ŐčĽŮéăŞéĘŃ觧ҹËŘčąÂąµěăËé ŕ´ÔąËąéŇ ŕĹŐéÂÇ«éŇ¢ÇŇ ËÂŘ´ áĹĐÁŐ»ŘčÁáµĂŕĘŐ§µčҧć ŕÁ×č͡´»ŘčÁ¤Çş¤ŘÁ·Ôȷҧ¶Ůˇˇ´ ¤ÓĘŃ觤Ǻ¤ŘÁ GPIO ¨Đ¶ŮˇĘč§ÁŇÂѧ FlashAir ŕľ×č͢ѺÁÍŕµÍĂěăËéŕ¤Ĺ×čÍąä»ăą·ÔČ·ŐčˇÓËą´ Ëҡˇ´»ŘčÁáµĂ äżĹěŕĘŐ§·Őč¶ŮˇşŃą·ÖˇäÇé FalshAir ˇç¨Đ¶ŮˇŕĹčąÍ͡ÁҨҡŕÇçşşĂŇÇŕ«ÍĂě ËĹѡˇŇ÷ӧҹˇç§čŇÂć ŕľŐ§ŕ·čŇąŐéŕͧ¤ĂŃş
ĂŮ»·Őč 3 ἹĽŃ§·Ńé§ËÁ´˘Í§Ç§¨Ă¤Çş¤ŘÁ
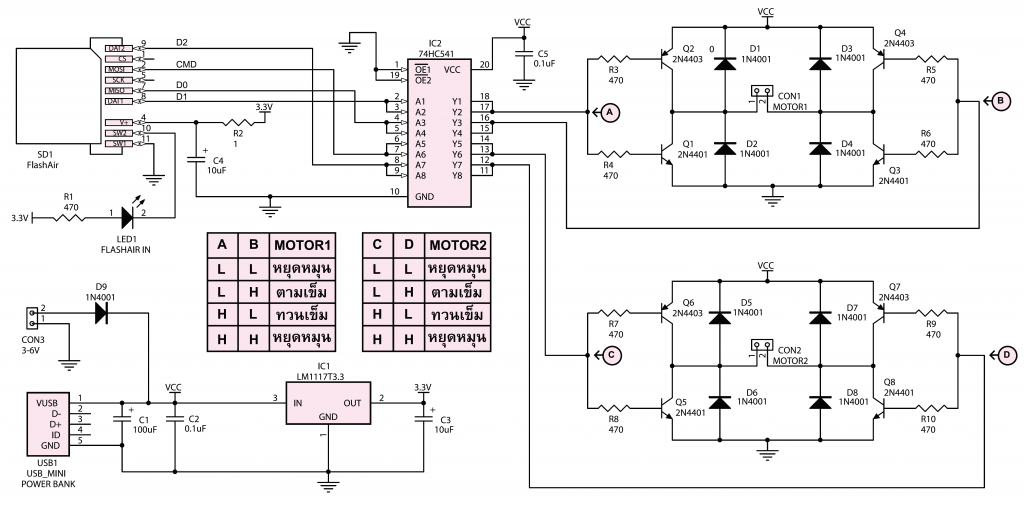
ĂŮ»·Őč 3 ŕ»çąáĽąĽŃ§·Ńé§ËÁ´˘Í§Ç§¨Ă¤Çş¤ŘÁ ·ÔȷҧˇŇĂËÁŘą˘Í§ÁÍŕµÍĂě·Ńé§ĘͧµŃÇ ¶Ůˇ¤Çş¤ŘÁÁҨҡ GPIO ˘Í§ FlashAir (µŇÁˇŇäǺ¤ŘÁĽčҹ˹éŇŕÇçşŕľ¨) ˇŇäǺ¤ŘÁăËéÁÍŕµÍĂěËÁŘą«éŇÂ/˘ÇŇ/ËÂŘ´ ¨ĐµéͧăŞé˘Ň¤Çş¤ŘÁ 2 ˘Ň ŕľ×č͵čÍŕ»çąĘŃŇł¤Çş¤ŘÁăËéǧ¨Ă˘Ńş H-bridge â´Â˘Ň·Őč 9 áĹĐ˘Ň 2 ˘Í§ FlashAir ăŞé¤Çş¤ŘÁÁÍŕµÍĂě MOTOR1 ĘčÇą˘Ň·Őč 7 áĹĐ 8 ăŞé¤Çş¤ŘÁÁÍŕµÍĂě MOTOR2
ĘŃŇł¤Çş¤ŘÁ¨Ňˇ˘Ň GPIO ¨Đ¶ŮˇĘč§ä»Âѧǧ¨Ă˘Ńş H-bridge â´ÂĽčŇą IC2 (74HC541) «Öč§ŕ»çąşŃżŕżÍĂě (Buffer) «Ö觷ӧҹŕ»çąÇ§¨ĂĘčÇąˇŃąŞą·ŐčˇŃéąĂĐËÇčҧżŇˇ˘Í§ FlashAir ·ŐčăŞéáç´ŃąäżŕĹŐé§ÍÂŮč·Őč 3.3 âÇĹµě ˇŃşÍŐˇżŇˇ·Őčŕ»çąÇ§¨Ă˘ŃşÁÍŕµÍĂě·Őčăąâ¤Ă§§ŇąąŐé ·ŐčÍ͡ẺÁŇăËé·Ó§ŇąăąŞčǧáç´Ńą 5.0 - 9.0 âÇŵě (µŇÁáµč˘ąŇ´˘Í§ÁÍŕµÍĂě·ŐčąÓÁŇăŞé§Ňą)
áĹĐŕľ×čÍŕľÔčÁˇÓĹѧ˘ŃşˇĂĐáʢͧĘčÇąşŃżŕżÍĂěăËéÁҢÖéąÍŐˇąÔ´ ŕĂҡç¨ĐÇÔ¸ŐąÓăŞéşŃżŕżÍĂěŔŇÂăąÁҵč͢ąŇąˇŃąŕ»çą¤Ůč ˘ŇŕÍҵěľŘµ˘Í§şŃżŕżÍĂěáµčĹеŃǢͧ 74HC541 ĘŇÁŇö¨čŇ¡ĂĐáĘä´éĘ٧ĘŘ´ 35 mA ŕÁ×čÍąÓ˘ąŇąˇŃą ˇçŞčÇÂăËéŕÍҵěľŘµ˘ŃşˇĂĐáĘä´éÁҢÖéąŕ»çą 70 mA ŕľ×čÍŕ»çąˇŇĂŕĽ×čÍăËéáąčă¨ÇčҡĂĐáĘ·Őč¶ŮˇĘč§ä»˘ŃşÇ§¨Ă H-bridge ąŃéąŕľŐ§ľÍąŃčąŕͧ
ËÁŇÂŕËµŘ ËҡÁÍŕµÍĂě·Őč¤ŘłĽŮéÍčŇąąÓÁŇăŞé§ŇąąŃéąŕ»çąÁÍŕµÍĂ좹ҴŕĹ硷ŐčăŞéˇĂĐáʢѺäÁčŕˇÔą 100 mA ˇçÍҨąÓŕÍҵěľŘµ¨Ňˇ 74HC541 ä»ăŞé˘ŃşÁÍŕµÍĂěâ´ÂµĂ§ŕĹ¡çä´é ˇç¨ĐŞčÇÂĹ´˘ąŇ´˘Í§Ç§¨Ăâ´ÂĂÇÁăËéŕĹçˇĹ§ä´éÍŐˇÁҡ
ĘÓËĂѺǧ¨Ă˘ŃşÁÍŕµÍĂěáşş H-bridge «Öč§ăŞé˘ŃşÁÍŕµÍĂěáµčĹĐŞŘ´ ¨Đ»ĂСͺ·ĂŇą«ÔĘŕµÍĂě 4 µŃÇ (Q1 - Q4 áĹĐ Q5 - Q8) «Ö觨зӧҹĂčÇÁˇŃą â´Âǧ¨ĂąŐéĽŮéŕ˘ŐÂąä´éÍ͡ẺÁŇăËéĘŇÁŇöăŞé˘ŃşÁÍŕµÍĂ좹Ҵ 600 mA «Öč§ŕľŐ§ľÍĘÓËĂŃşăŞé§ŇąˇŃşÁÍŕµÍĂ좹ҴŕĹ硷ŃčÇä»ä´éÍÂčҧʺŇÂć
áËĹ觨čŇÂäżăąâ¤Ă§§ŇąąŐéŕĹ×͡ăŞéä´é 2 áşş â´Â¤ŘłĽŮéÍčŇąĘŇÁŇöăŞéáşµŕµÍĂŐč AA ¨ÓąÇą 4 ˇéÍą (1.5 V x 4 ˇéÍą = 6.0 V) µčÍĽčŇą·Ň§ CON3 ˇçä´é áĹĐÂѧĘŇÁŇöăŞé Power Bank ĘÓËĂŃşŞŇĂě¨áşµŕµÍĂŐč˘Í§ĘÁŇĂěµâżąâ´ÂµčÍĽčŇą·Ň§ USB1
ĘčÇą«ÍżµěáÇĂě
ăąâ¤Ă§§ŇąąŐé FlashAir ¨Đ·Ó§Ňąŕ»çą Web server áĹĐ Wireless AP ´Ń§·Őčä´éŕˇĂÔčąä»şéҧáĹéÇ㹵͹µéą â´ÂÁŐËąéҢͧŕÇçşŕľ¨«Ö觼Ůéŕ˘ŐÂąä´éĘĂéҧ˘Öéą ·Ó§Ňąŕ»çąĘčÇą¤ŃąşŃ§¤Ńş·ŐčăŞé¤Çş¤ŘÁˇŇĂŕ¤Ĺ×čÍą·Őč˘Í§ËŘčąÂąµě
ŕą×čͧ¨ŇˇˇŇäǺ¤ŘÁËŘčąÂąµě¨ĐµéͧăŞéľÍĂěµ GPIO ˘Í§ FlashAir ŕ»çąŕ¤Ă×čͧÁ×Í áµčÇčҿѧˇěŞŃąąŐé¨Đ¶Ůˇ»Ô´ŕÍŇäÇéŕ»çą¤čŇŕĂÔčÁµéą (default) ¶éҵéͧˇŇĂăŞé§Ňą¨Đµéͧŕ»Ô´âËÁ´·ŐčÇčŇąŐéŕĘŐ¡čÍą â´ÂˇŇĂáˇéäżĹě·ŐčŞ×čÍÇčŇ CONFIG «Öč§äżĹěąŐé¨ĐÍÂŮčăąâżĹŕ´ÍĂě (folder) Ş×čÍÇčŇ SD_WLAN áµčÇčŇâżĹŕ´ÍĂě¨Đ¶Ůˇ«čÍą (hidden) ŕÍŇäÇé ŕĂҨ֧ÍҨÁͧäÁčŕËçąâżĹŕ´ÍĂě·ŐčÇčŇąŐéˇçŕ»çąä´é ĘÓËĂŃş¤ŘłĽŮéÍčŇą·ŐčăŞéĂĐşş»ŻÔşŃµÔˇŇĂ Windows ÇÔ¸ŐˇŇáç¤×Í ăËé¤ŘłĽŮéÍčŇąˇÓËą´ÇÔ¸ŐˇŇĂáĘ´§äżĹě˘Í§ Windows ´éÇ¡ŇĂŕĹ×͡·Őč Show hidden files and folders ´Ń§ĂŮ»·Őč 4 ŕľ×čͻԴˇŇĂ«čÍąâżĹŕ´ÍĂěŕĘŐ¡čÍą ¨ŇˇąŃ鹨֧ăŞé Text Editor ľÔÁľěŕľÔčÁşĂĂ·Ń´ĘŘ´·éŇ¢ͧäżĹěÇčŇ IFMODE=1 ŕľ×čÍŕ»Ô´âËÁ´¤Çş¤ŘÁ GPIO ŕÁ×čÍŕĘĂç¨áĹéǡçĘŇÁŇöˇĹŃşä»áˇéăËéˇĹŃşŕ»çą Do not show hidden files ans folders ä´éµŇÁŕ´ÔÁ
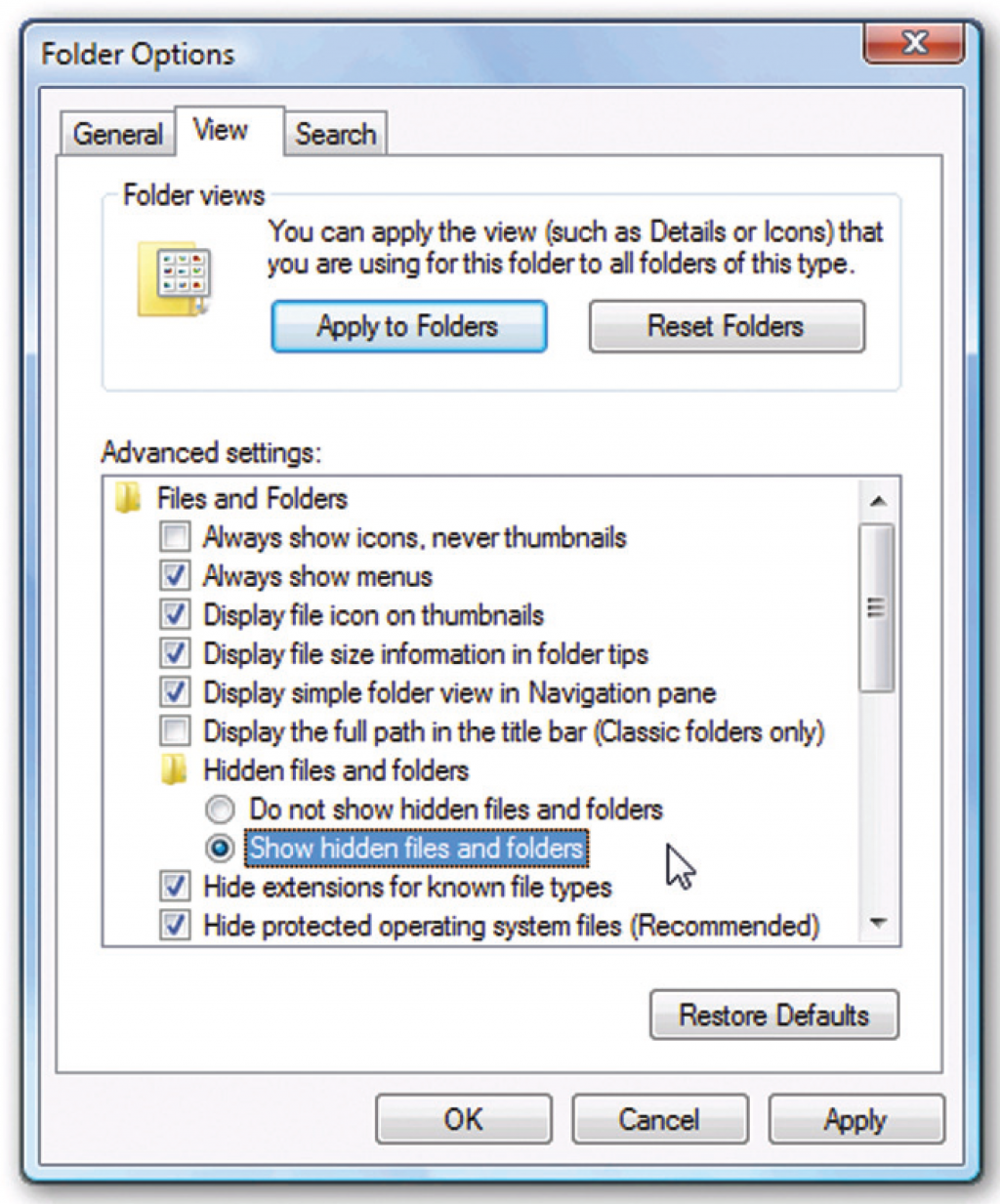
ĂŮ»·Őč 4 âżĹŕ´ÍĂě SD_WLAN «Öč§ŕ»çąĘčÇą·ŐčŕˇçşˇŇõŃ駤čҵčŇ§ć ˘Í§ FlashAir ăąŕĂÔčÁµéą (default) ¨Đ¶Ůˇ«čÍą (hidden) ÍÂŮč·ÓăËéŕĂҨ֧ÍҨÁͧäÁčŕËçąŕ¨éŇâżĹŕ´ÍĂě·ŐčÇčŇąŐé ĘÔ觷ŐčŕĂҵéͧ·Óˇç¤×Í »Ô´ˇŇĂ«čÍą·ŐčÇčŇąŐéŧŞŃčǤĂŇÇ ÇÔ¸ŐˇŇä×ÍăËé¤ŘłĽŮéÍčŇąˇÓËą´ăËéˇÓËą´ÇÔ¸ŐˇŇĂáĘ´§äżĹě´éÇ¡ŇĂŕĹ×͡ Show hidden files and folders
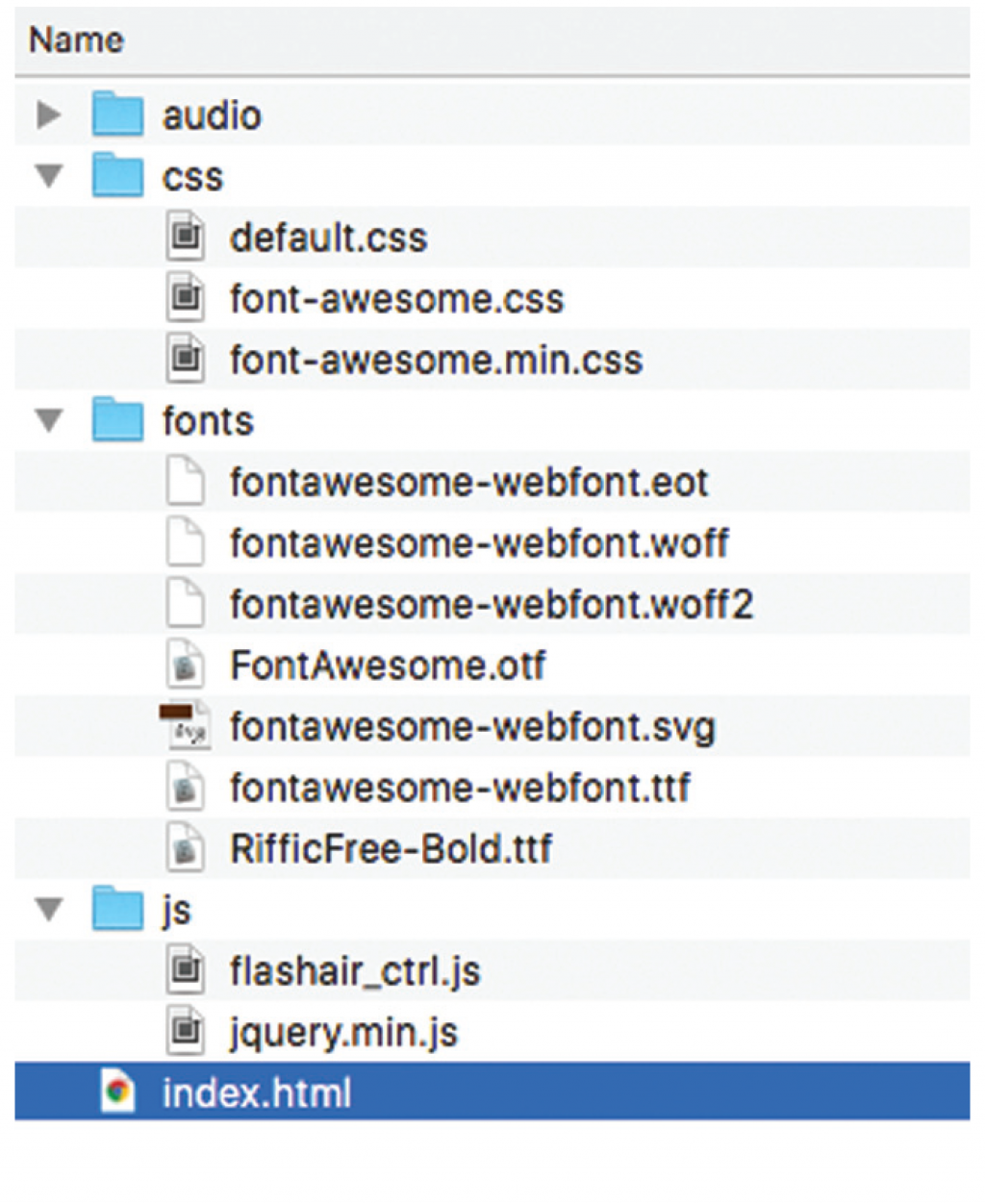
ĂŮ»·Őč 5 â¤Ă§ĘĂéҧâżĹŕ´ÍĂě˘Í§ŕÇçşŕľ¨·ŐčÍÂŮčŔŇÂăą FlashAir
ËĹѧ¨ŇˇąŃ鹤سĽŮéÍčŇą¨Đµéͧ´ŇÇąěâËĹ´äżĹě http://electronics.se-ed.com/download ÁŇ unzip ŧÂѧ FlashAir ĽĹĹŃľ¸ěˇç¤×Í äżĹě·ŐčÍÂŮčăą FlashAir ·Ńé§ËÁ´¨ĐÁŐâ¤Ă§ĘĂéҧâżĹŕ´ÍĂě´Ń§ ĂŮ»·Őč 5 ąŃčąŕͧ â´ÂÁŐäżĹě·Őčŕ»çąĘčÇąËĹѡ ¤×Í index.html áĹĐ flashair_ctrl.js ŕÁ×čͤسĽŮéÍčŇąŕ»Ô´ËąéŇྨ http://flashair/index.html ĽčŇą·Ň§ĘÁŇĂěµâżą index.html ˇç¨ĐąÓÁŇáĘ´§˘ÖéąşąŕÇçşşĂŇÇŕ«ÍĂě ľĂéÍÁˇŃşĘ¤ĂÔ» flashair_ctrl.js ¨Đ¶ŮˇâËĹ´˘Öéąŕľ×čÍĂͷӧҹ ĽĹĹŃľ¸ě·Őčä´éˇç¤×Í·Őč¨ÍŔŇľ˘Í§ĘÁŇĂěµâżą¨ĐÁŐËąéҵҴѧ ĂŮ»·Őč 6
㹡óշŐč»ŘčÁ¤Çş¤ŘÁ·ÔȷҧËĂ×Í»ŘčÁËÂŘ´¶Ůˇˇ´ ʤĂÔ» flashair_ctrl.js ¨Đ·ÓˇŇĂŕĂŐ¡ CGI (command.cgi) ˘Í§ FlashAir ŕľ×čÍĘŃč§ăËéľÍĂěµ CMD, D01, D1, D2 (´ŮἹĽŃ§Ç§¨ĂăąĂŮ»·Őč 1 »ĂСͺ) ÁŐĹͨԡŕ»çą HIGH (1) ËĂ×Í LOW (0) ŕ»çąˇŇäǺ¤ŘÁ·ÔȷҧˇŇĂËÁŘą˘Í§ÁÍŕµÍĂě
¡µŃÇÍÂčҧŕŞčą ŕÁ×č͡´»ŘčÁŕ´ÔąËąéŇ Ę¤ĂÔ» flashair_ctrl.js ¨ĐŕĂŐ¡ CGI ˘Í§ FlashAir â´ÂăŞé˘éͤÇŇÁ¤ÓĘŃ觴ѧąŐé
• http://flashair/command.cgi?op=190&CTRL=0x1f&DATA=0x0C
˘éͤÇŇÁµĂ§ĘčÇą DATA=0x0C ¤×͡ŇĂĘŃč§ăËéľÍĂěµ D1 (0x04) áĹĐ D2 (0x08) ÁŐĹͨԡŕ»çą HIGH ľĂéÍÁˇŃą·Ń駤Ůč (0x04 + 0x08 = 0x0C) ŕ»çąˇŇĂĘŃč§ăËéÁÍŕµÍĂě·Ńé§Ęͧ˘éҧËÁع仢éҧ˹éŇľĂéÍÁˇŃąąŃčąŕͧ ĘčÇąˇŇĂŕĹŐéÂÇ«éŇÂ/˘ÇŇ ËĂ×ͶÍÂËĹѧ ˇçăŞéËĹѡˇŇĂĹѡɳĐŕ´ŐÂǡѹ
ĂŮ»·Őč 6 ĹŇÂǧ¨ĂľÔÁľě˘ąŇ´ŕ·čŇáşş
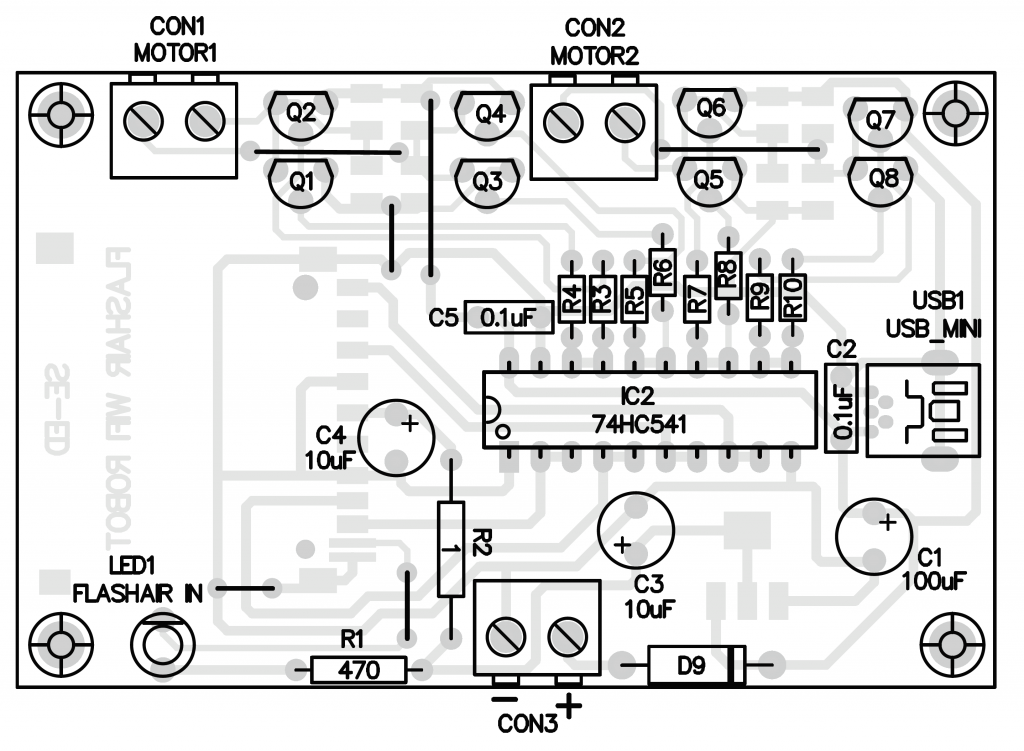
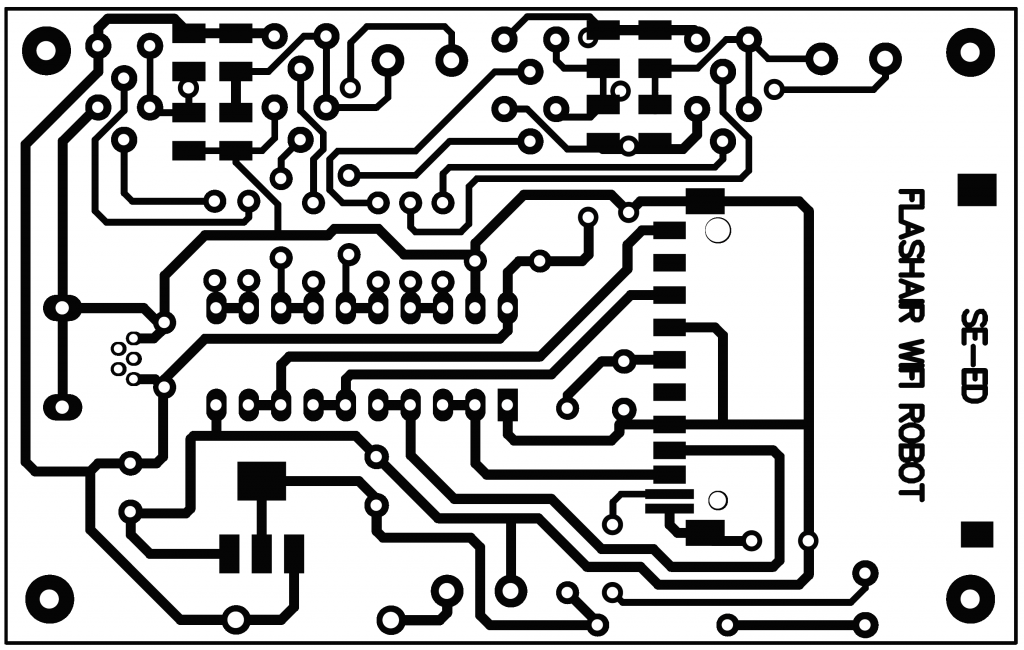
ĂŮ»·Őč 7 µÓá˹觡ŇĂŧÍŘ»ˇĂłě´éŇąşą (Top Layer)
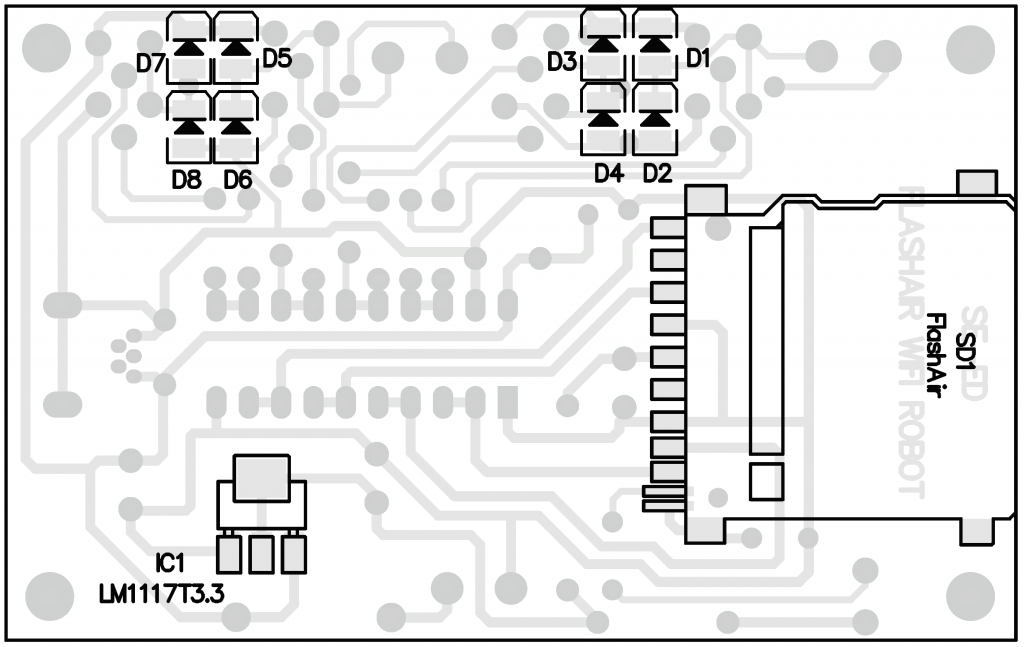
ĂŮ»·Őč 8 µÓá˹觡ŇĂŧÍŘ»ˇĂłě´éŇąĹčҧ (Bottom Layer)
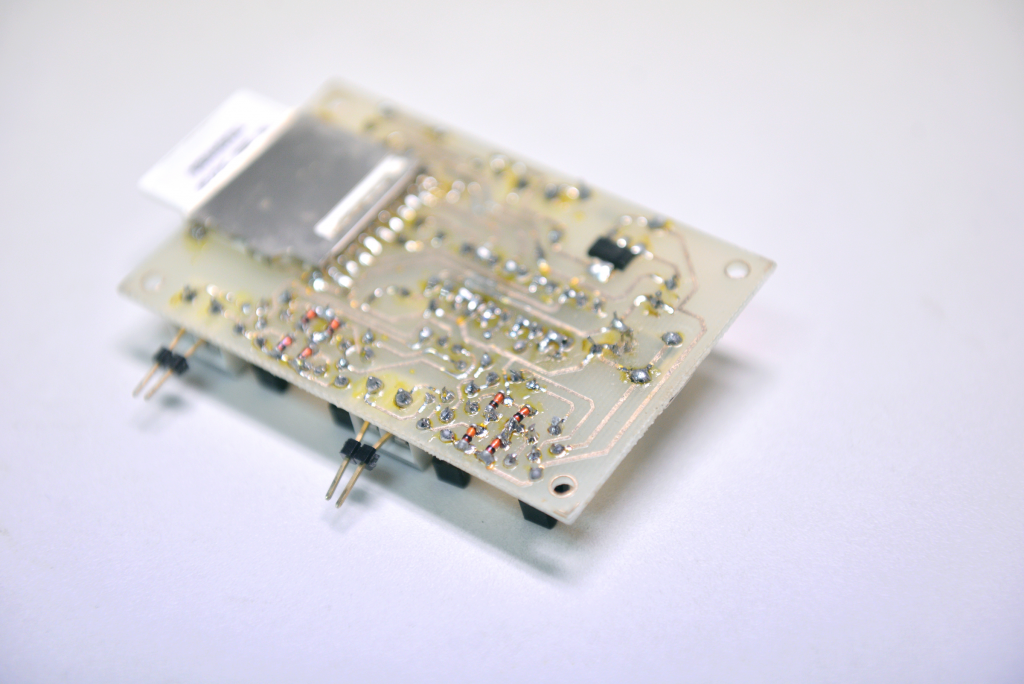
ĂŮ»·Őč 7 áĹĐ 8 ŕ»çąµÓáËąč§ăąˇŇĂŧÍŘ»ˇĂłěşąáĽčą PCB ·Ń駷ҧ´éŇąşąáĹĐĹčҧ ÇÔ¸ŐˇŇĂŧÍŘ»ˇĂłě ¤ÇĂŕĂÔčÁŧÍŘ»ˇĂłě·ŐčÍÂŮčŞŃéą´éŇąşą (Top Layer) ˇčÍą â´ÂˇŇĂŕĂÔčÁşŃ´ˇĂŐÍŘ»ˇĂłě·ŐčÁŐ¤ÇŇÁĘ٧ąéÍÂć ˇčÍą ŕŞčą ĹÇ´¨ŃęÁ»ě, µŃǵéŇą·Ňą, µŃÇŕˇçş»ĂĐ¨Ř áĹĐ«ç͡ŕˇçµ IC2 ¨ŇˇąŃ鹨֧µŇÁ´éÇÂÍŘ»ˇĂłě·ŐčĘ٧Áҡ˘Öéą äĹčŕĂŐ§ˇŃąÁҨą¤Ăş
¨ŇˇąŃ鹨֧¤čͺѴˇĂŐÍŘ»ˇĂłě·ŐčÍÂŮčŞŃéą´éŇąĹčҧ (Bottom Layer) ÍŘ»ˇĂłě·ŐčµÔ´µŃé§ÍÂŮč㹪ŃéąąŐéŕ»çąáşş SMD ·Ńé§ËÁ´ 㹡ŇúѴˇĂŐ¨Ö§Âҡ˘ÖéąáĹФ§µéͧă¨ŕÂçąáĹĐ »Ăҳյ㹡ŇĂ»ĂСͺĘѡ˹čÍ ŕą×čͧ¨ŇˇÍŘ»ˇĂłě SMD ÁŐ˘ąŇ´ŕĹ硴éÇÂąŃčąŕͧ ąÍˇ¨ŇˇąŃ鹤ÇĂĂĐÁŃ´ĂĐÇѧŕˇŐčÂǡѺĂĐ´Ńş¤ÇŇÁĂé͹㹡ŇúѴˇĂŐ ĂĐÁŃ´ĂĐÇѧäÁčăËéÍŘ»ˇĂłěáĹĐáĽčąÇ§¨ĂľÔÁľěä´éĂŃş¤ÇŇÁĂéÍąĘĐĘÁ·ŐčÁҡŕˇÔąä» ŕľĂŇĐÍҨ·ÓăËéŕˇÔ´¤ÇŇÁŕĘŐÂËŇ¢Öéąä´éąŃčąŕͧ ËĹѧ¨ŇˇąŃéąŕ»çąˇŇõĂǨĘÍşŕş×éͧµéą â´ÂăËéąÓÁŃŵÔÁÔŕµÍĂěµĂǨĘÍş¤ÇŇÁµčÍŕą×čͧ ĹͧµĂǨ´ŮÇčŇŕˇÔ´ˇŇĂĹѴǧ¨ĂËĂ×ÍäÁč ËĹѧ¨ŇˇµĂǨĘÍş´ŐáĹéÇ ˘ŃéąµčÍ仡çŕ»çąˇŇĂ·´ĘÍş
ăËéąÓáËĹ觨čŇÂäż AA ¨ŇˇăąËŃǢé͡čÍąµčÍŕ˘éҡѺşÍĂě´·Őč¤ÍąŕąçˇŕµÍĂě CON3 ĹͧăŞéÁŃŵÔÁÔŕµÍĂěÇŃ´áç´ŃąµŇÁ¨Ř´µčҧć áç´Ńą·Őč¨Ř´ VCC ŕÁ×čÍŕ·ŐÂşˇŃşˇĂŇÇ´ě (GND) ¤ÇèĐÍÂŮč·ŐčĂŇÇć 5 âÇŵě áĹĐĹͧÇŃ´áç´Ńą·ŐčŕÍҵěľŘµ˘Í§ IC1 «Öč§ŕ»çą low-drop linear regulator ŕ·ŐÂşˇŃş GND ¨Đµéͧä´éáç´ŃąÍ͡ÁŇ·Őč 3.3 âÇŵě ËҡŕˇÔąˇÇčŇąŐéÍҨ·ÓăËé FlashAir ŕĘŐÂËŇÂä´é
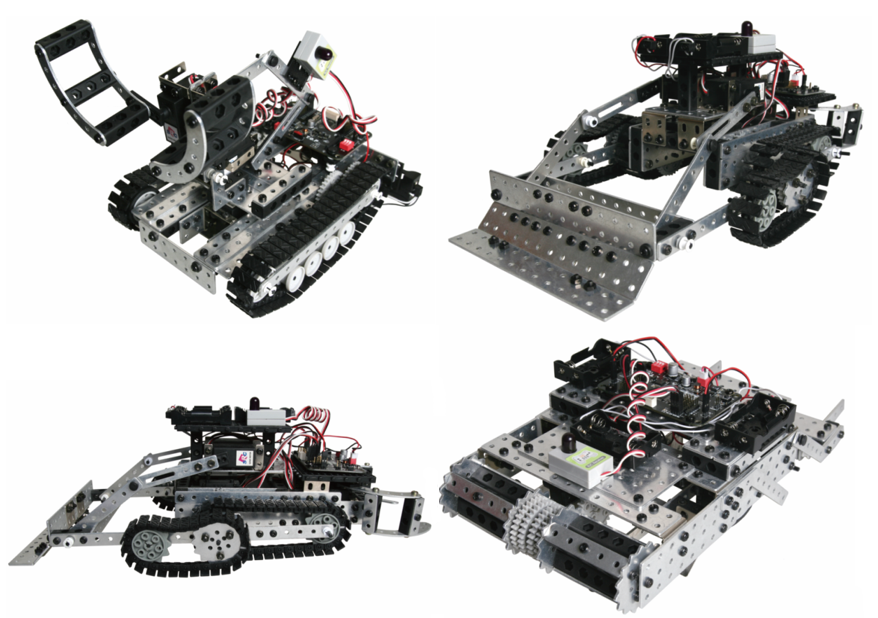
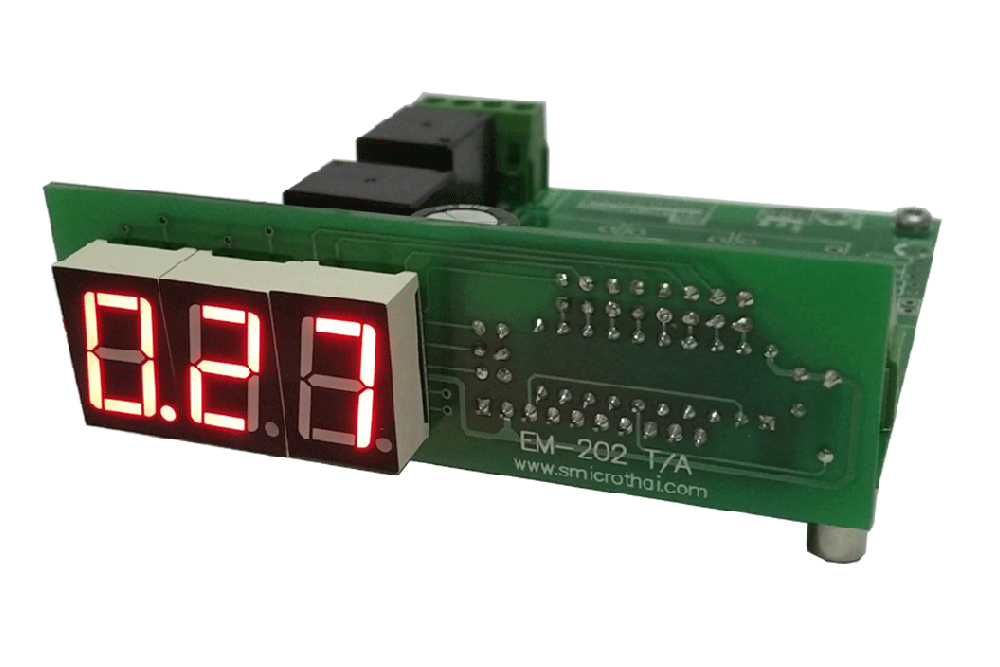
ĂŮ»·Őč 9 ËŘčąÂąµě·Őč»ĂСͺ˘ÖéąÁҨҡ T.O.P Full series
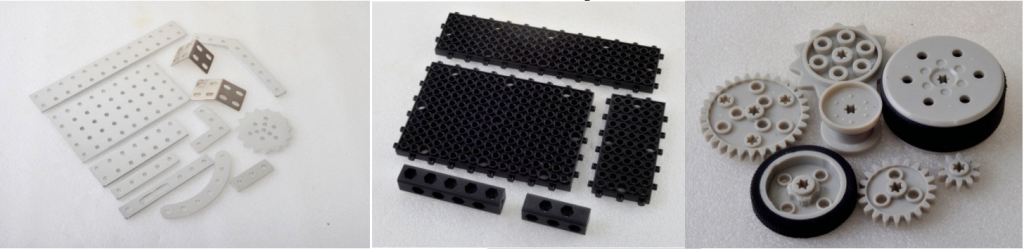
ĂŮ»·Őč 10 ŕżĂÁÍĐĹŮÁÔŕąŐÂÁ·ŐčąÓÁŇ»ĂСͺËŘčąÂąµě
ĘčÇąâ¤Ă§ĘĂéҧ˘Í§ËŘčąÂąµě·Őč¶ŮˇŕĹ×͡ÁŇăŞéăąâ¤Ă§§ŇąąŐé ĽŮéŕ˘ŐÂąä´éąÓ ŞŘ´ËŘčąÂąµěŕľ×č͡ŇĂČÖˇÉŇ T.O.P (Training course Of Professional) ŞŘ´ŕĂŐÂąĂŮéËŘčąÂąµě˘ŃéąĘ٧ ÁŇăŞé§Ňąŕą×čͧ¨Ňˇŕ»çąŞŘ´¤Ôµ·ŐčÁŐŞÔéąĘčÇą»ĂСͺẺÍĐĹŮÁÔŕąŐÂÁ ¶Í´»ĂСͺä´é§čŇ áĹĐÂѧĘŇÁŇö»ĂŃş»Ăا´Ń´á»Ĺ§µŇÁ¨ÔąµąŇˇŇĂä´éÍÂčҧäÁč¨ÓˇŃ´ÍŐˇ´éÇ â´Â¤ŘłĽŮéÍčŇą·ŐčĘąă¨ËŘčąÂąµěĂŘčąąŐéˇçĘŇÁŇöĘÍş¶ŇÁ˘éÍÁŮĹä´éἹˇ STEM Education ˘Í§şĂÔÉŃ· «ŐŕÍç´ÂŮपŃčą ¨ÓˇŃ´ (ÁËŇŞą)
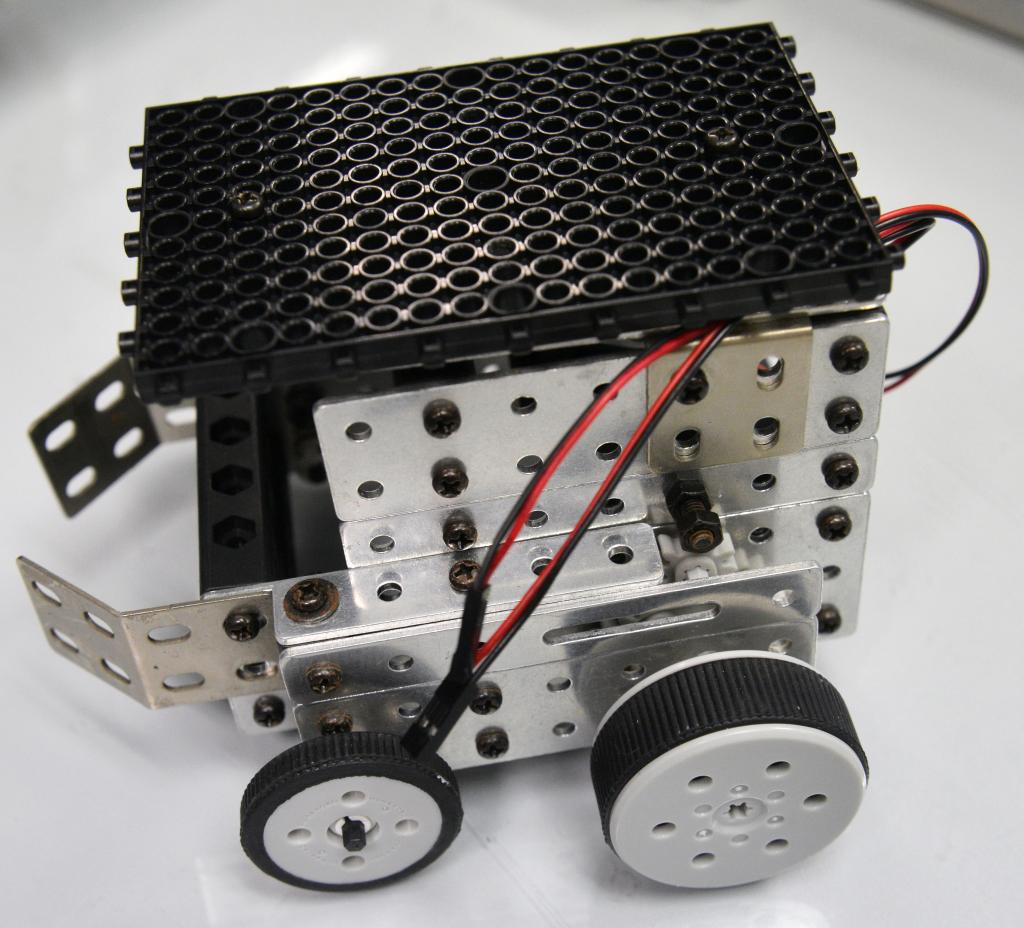
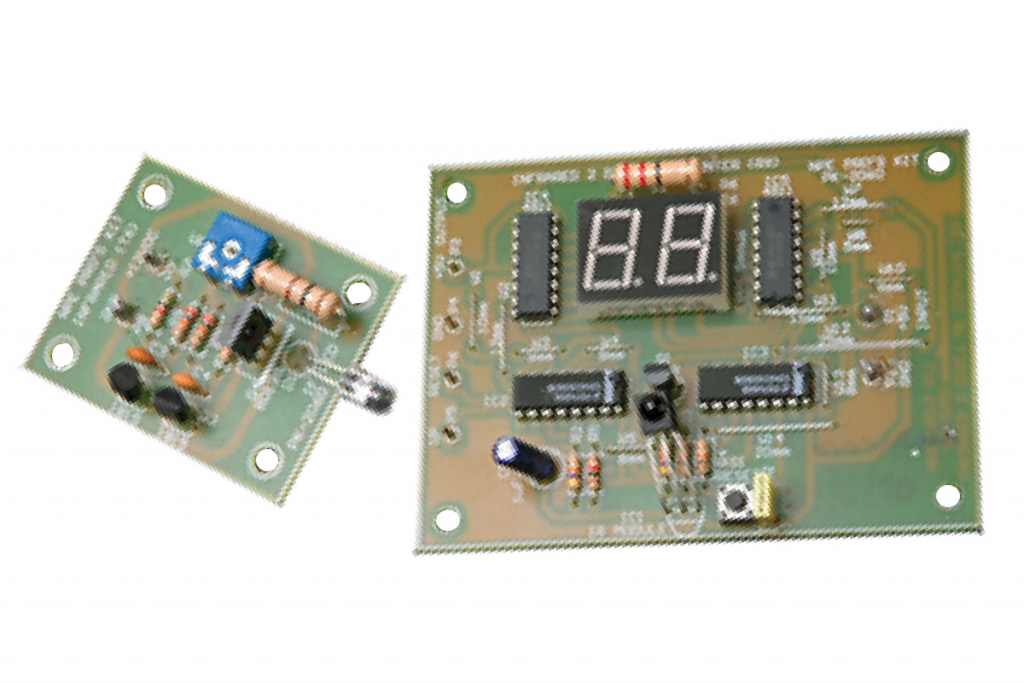
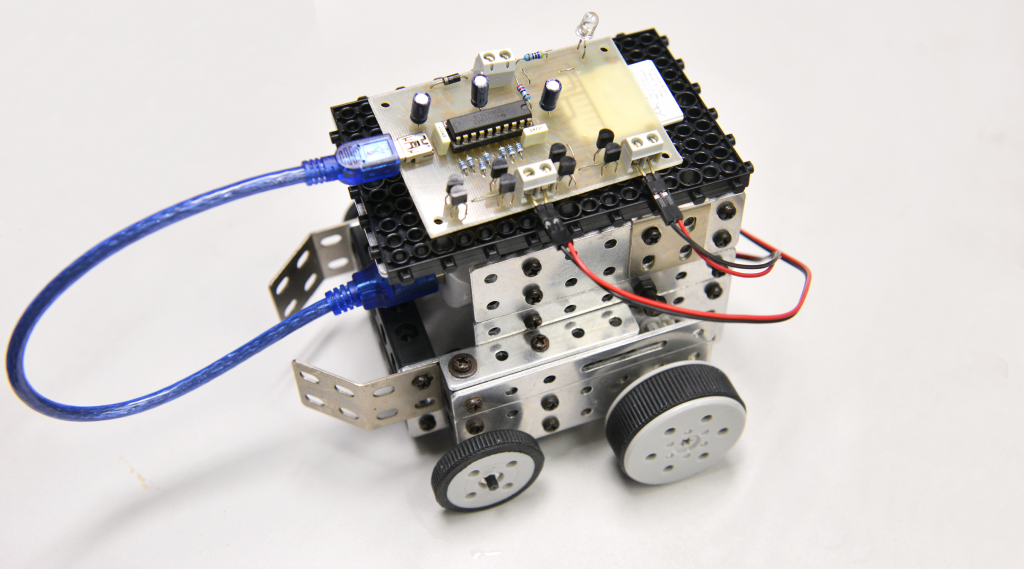
ĂŮ»·Őč 11 ËŘčąÂąµě Wi-Fi Robot ·Őč»ĂСͺŕĘĂç¨ŕ»çąĂŮ»ŕ»çąĂčҧ
ĂŮ»·Őč 11 ŕ»çąËŘčąÂąµěµŇÁ¨ÔąµąŇˇŇĂłě·ŐčĽŮéŕ˘ŐÂąÍÂҡä´é ˇŇĂ»ĂСͺËŘčąÂąµěˇç·Óä´éäÁčÂҡŕĹ ŕą×čͧ¨ŇˇŞŘ´ T.O.P (Training course Of Professional) ä´é¶ŮˇÍ͡ẺÁŇŕľ×čÍŞčÇÂ㹡ŇĂĘĂéҧáĹСŇĂĘéĂҧËŘčąÂąµěÍÂŮčáĹéÇ ĘÓËĂŃşŕ´çˇËĂ×ÍáÁéáµč¤ŘłĽŮéÍčŇą·ŐčÍҨäÁčÁշѡÉзҧŞčҧˇçÂѧĘŇÁŇö»ĂСͺËŘčąÂąµě˘Öéąŕͧä´éÍÂčҧʺŇÂć
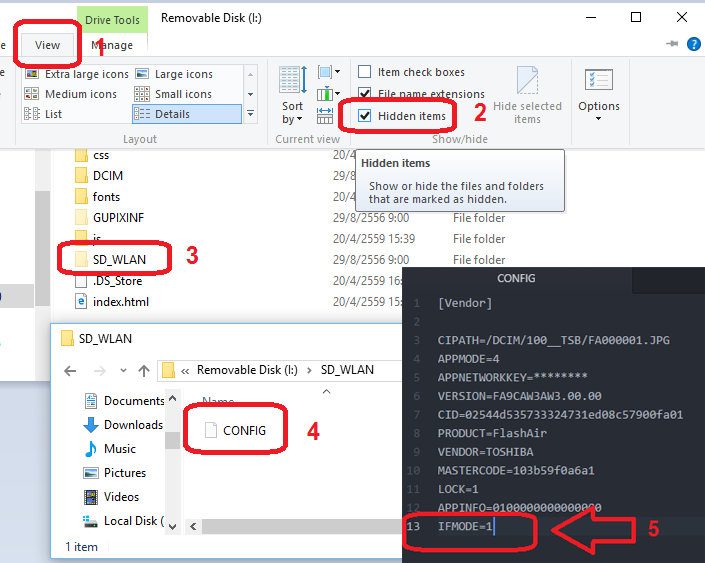
ĂŮ»·Őč 12 ·ÓˇŇĂáˇéä˘ CONFIG ˘Í§ FlashAir ŕľ×čÍăËéĘŇÁŇö¤Çş¤ŘÁ GPIO ä´é
ÁҶ֧˘Ń鹵͹ąŐéáĘ´§ÇčŇâ¤Ă§§ŇąľĂéÍÁ·ÓˇŇĂ·´ĘÍşáĹéÇ ˇčÍąÍ×čąăËé¤Ń´Ĺ͡äżĹě·Ńé§ËÁ´Ĺ§ăą FlashAir ŕĘŐ¡čÍą ˘Ń鹵͹ ¤×Í ŕĘŐÂş FlashAir ŕ˘éҡѺ¤ÍÁľÔÇŕµÍĂě˘Í§·čŇą áĹéÇä»´ŇÇąěâËĹ´äżĹě·ŐčăŞéĂčÇÁˇŃşÇ§¨Ăä´é·ŐčŕÇçşä«µě http://electronics.se-ed.com/download
ĂŮ»·Őč 13 Ş×čÍŕ¤Ă×͢čŇ¢ͧ FlashAir
ĂŮ»·Őč 14 Ëąéҵčҧ¶ŇÁĂËŃĘĽčŇąĘÓËĂŃş http://flashair/
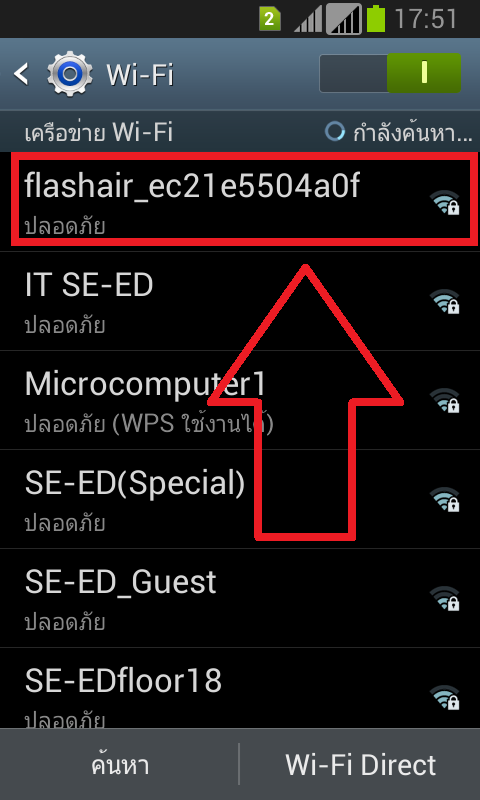
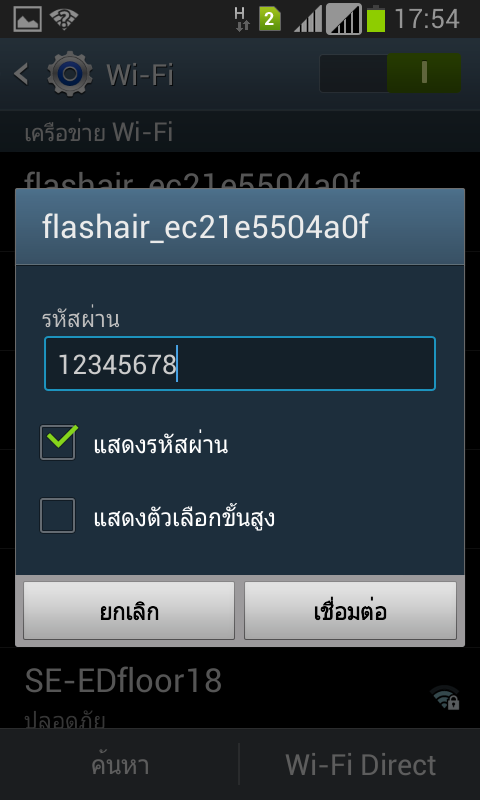
ŕÁ×čÍŕµĂŐÂÁ¤ÇŇÁľĂéÍÁ·Ň§´éŇą FlashAir ŕĂŐÂşĂéÍÂáĹéǤĂŇÇąŐéˇçÁŇĹŘ¡ѹµčÍŕĹ ŕĂÔčÁ¨ŇˇµčÍǧ¨ĂăËé¤ĂşľĂéÍÁ¨čŇÂáç´ŃąăËéˇŃşÇ§¨Ă ŕÁ×čÍŕĂÔčÁ·Ó§ŇąËҡ FlashAir ÍÂŮčăą«ç͡ŕˇçµ LED1 ¨ĐµÔ´ĘÇčҧ ¨ŇˇąŃéąăËé·ÓˇŇäéąËŇĘŃŇł WiFi ·ŐčÍÂŮčăˇĹéć ˇŃşµŃÇâ¤Ă§§Ňą 㹡ŇĂ·´Ĺͧŕş×éͧµéąąŐé¨ĐăŞéâ·ĂČŃľ·ěÁ×Ͷ×ÍŕŞ×čÍÁµčÍ ăËéŕ»Ô´ WiFi áĹФéąËŇŕ¤Ă×͢čŇ·ŐčŞ×čÍ “flashair_xxxxxxx” ŕÁ×čÍŕ¨ÍáĹéǡçăËéŕŞ×čÍÁµčÍä´éŕĹ ŕľĂŇĐąŃ蹤×ÍĘŃŇł¨Ňˇ FlashAir ˘Í§ŕĂŇąŃčąŕͧ
ËĹѧ¨Ňˇ·ŐčŕŞ×čÍÁµčÍŕĘĂç¨áĹéÇăËéŕ»Ô´ web browser ăąâ·ĂČŃľ·ě˘ÖéąÁŇ ľĂéÍÁˇŃşľÔÁľě㹪čͧ URL ŕ»çą http://flashair/ ¨ŇˇąŃ鹨ĐÁŐËąéҵčҧăËÁč˘ÖéąÁŇŕľ×čÍăËéŕĂŇăĘčĂËŃĘĽčŇą Ëҡ·čŇąÂѧäÁčä´éµŃé§ĂËŃĘĽčŇąăËÁč ¤čŇ Default ¨Đŕ»çą “12345678” ŕÁ×čÍä´éáĹéǡ硴»ŘčÁ OK (´Ń§ĂŮ»·Őč 14)
ŕÁ×čÍŕ˘éŇÁŇä´éáĹéÇ ˘Ń鹵͹µčÍ仨зӡŇĂâËĹ´äżĹě index.html ˘ÖéąÁŇ â´ÂăËéľÔÁľě http://flashair/index.html 㹪čͧ URL «Öč§äżĹěąŐéŕ»çąËąéŇÍÔąŕ·ÍĂěŕżĘ·ŐčăŞéĘÓËĂŃş¤Çş¤ŘÁËŘčąÂąµě˘Í§ŕĂŇ ŕÁ×čÍŕ»Ô´˘ÖéąÁŇ·čŇą¨Đä´éËąéŇÍÔąŕ·ÍĂěŕżĘ´Ń§áĘ´§ăąĂŮ»·Őč 15 ąŃčąáĘ´§ÇčŇŕĂŇĘŇÁŇöµÔ´µč͡Ѻ FlashAir ä´éáĹéÇ ˘Ń鹵͹µčÍ仨Đŕ»çąˇŇĂĘŃč§ăËéËŘčąÂąµěä»ăą·Ôȷҧ·ŐčŕĂҵéͧˇŇĂ ·Óä´éâ´ÂˇŇá´»ŘčÁşąËąéҨÍâ·ĂČŃľ·ě˘Í§ŕĂŇ Ëҡ¶ŮˇµéͧËŘčąÂąµě˘Í§ŕĂҨеéͧŕ´ÔąËąéŇ, ¶Í´ËĹѧ, ŕĹŐéÂÇ«éŇÂ, ŕĹŐéÂǢÇŇ áĹĐĘŃč§ăËéËÂŘ´ä´é
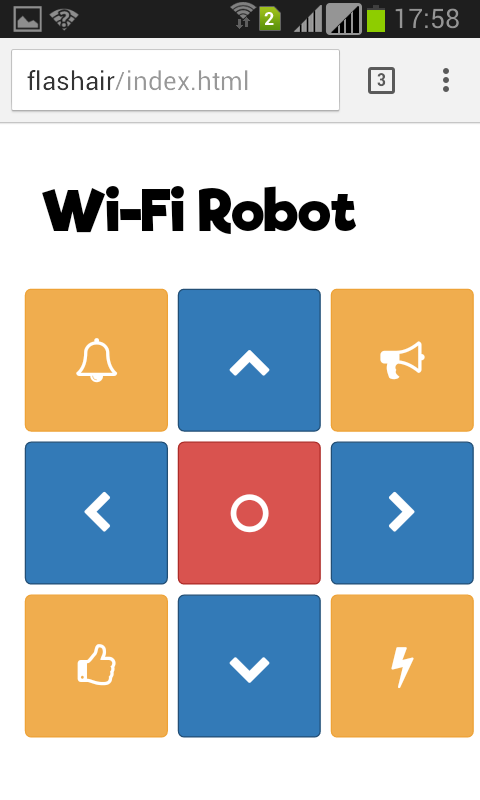
ĂŮ»·Őč 15 ËąéŇŕÇçş index.html ·ŐčâËĹ´˘ÖéąÁŇ
ŕľÔčÁŕµÔÁ ĘÓËĂŃş·čŇą·Őčŧ App ĘÓËĂŃşĘ᡹ QR Code äÇéăąÁ×Ͷ×ÍÍÂŮčáĹéÇ ·čŇąĘŇÁŇöăŞéÁ×Ͷ×ÍĘ᡹ŕľ×čÍ´Ö§˘éÍÁŮĹŞ×čÍŕÇçşÍ͡ÁŇáĹéÇăŞéâ»ĂáˇĂÁŕÇçşŕşĂŇÇěŕ«ÍĂěâ´ÂäÁčµéͧľÔÁľěăą URL ´Ń§áĘ´§ăąĂŮ»·Őč 16
ĂŮ»·Őč 16 QR Code ĘÓËĂŃşâËĹ´
Ëҡä´éĽĹĹŃľ¸ěáşşąŐéáĹéÇáĘ´§ÇčŇâ¤Ă§§Ňą Flashair WiFi Robot ĘŇÁŇöăŞé§Ňąä´éáĹéÇ ¤ĂŇÇąŐéˇç˘ÖéąÍÂŮčˇŃş·čŇąáĹéÇÇčҨĐÁŐáąÇ·Ň§ăąˇŇĂ»ĂŃşáµč§ËĂ×Íŕ»ĹŐčÂąá»Ĺ§ĂٻẺ˘Í§ËŘčąÂąµěŕ»çąáşşă´ ËĂ×ÍÍҨ¨ĐąÓä»ĘÍąĹ١ËĹŇą˘Í§·čŇąăËéÁŐľ×鹰ҹ㹡Ňúѧ¤ŃşáĹĐĘĂéҧËŘčąÂąµěä´éŕͧ «Ö觹ѺÇčŇŕ»çąˇéŇÇĘÓ¤ŃÁҡŕĹ·Őŕ´ŐÂǹФĂŃş
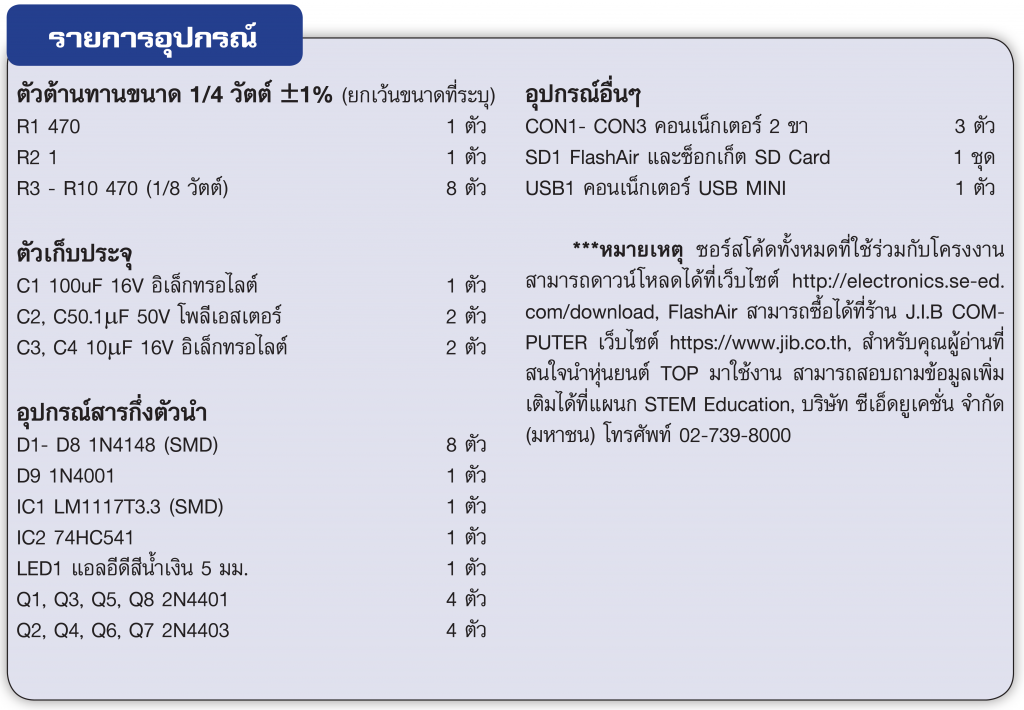
ËÁŇÂŕ˵Ř: «ÍĂěĘâ¤é´·Ńé§ËÁ´·ŐčăŞéĂčÇÁˇŃşâ¤Ă§§ŇąĘŇÁŇö´ŇÇąěâËĹ´ä´é·ŐčŕÇçşä«µě http://electronics.se-ed.com/download, FlashAir ĘŇÁŇö«×éÍä´é·ŐčĂéŇą J.I.B COMPUTER ŕÇçşä«µě https://www.jib.co.th, ĘÓËĂŃş¤ŘłĽŮéÍčŇą·Őčʹ㨹ÓËŘčąÂąµě TOP ÁŇăŞé§Ňą ĘŇÁŇöĘÍş¶ŇÁ˘éÍÁŮĹŕľÔčÁŕµÔÁä´é·ŐčἹˇ STEM Education, şĂÔÉŃ· «ŐŕÍç´ÂŮपŃčą ¨ÓˇŃ´ (ÁËŇŞą) â·ĂČŃľ·ě 02-739-8000
ʧǹĹÔ˘ĘÔ·¸Ôě µŇÁľĂĐĂŇŞşŃѵÔĹÔ˘ĘÔ·¸Ôě ľ.Č. 2539 www.thailandindustry.com
Copyright (C) 2009 www.thailandindustry.com All rights reserved.
˘ÍʧǹĘÔ·¸Ôě ˘éÍÁŮĹ ŕą×éÍËŇ ş·¤ÇŇÁ áĹĐĂŮ»ŔŇľ (ăąĘčÇą·Őč·Ó˘Öéąŕͧ) ·Ńé§ËÁ´·Őč»Ăҡ®ÍÂŮčăąŕÇçşä«µě www.thailandindustry.com ËéŇÁÁÔăËéşŘ¤¤Ĺă´ ¤Ń´Ĺ͡ ËĂ×Í ·ÓĘÓŕąŇ ËĂ×Í ´Ń´á»Ĺ§ ˘éͤÇŇÁËĂ×Íş·¤ÇŇÁă´ć ˘Í§ŕÇçşä«µě ËҡĽŮéă´ĹĐŕÁÔ´ äÁčÇčҡŇĂĹ͡ŕĹŐÂą ËĂ×ÍąÓĘčǹ˹Öč§Ęčǹ㴢ͧş·¤ÇŇÁąŐéä»ăŞé ´Ń´á»Ĺ§ â´ÂäÁčä´éĂѺ͹Řҵŕ»çąĹŇÂĹѡɳěÍѡÉĂ ¨Đ¶Ůˇ´ÓŕąÔą¤´Ő µŇÁ·Ő衯ËÁŇÂşŃѵÔäÇéĘ٧ĘŘ´