ŕ´ŞÄ·¸Ôě ľĹŕÂŐčÂÁ
ÍŐŕÁĹě : ÚBobby524@hotmail.com
Όྨ : facebook.com/bobbysound88

“ ąŃÂÂСŇþѲąŇ·ÄɮաŇĂÍ͡Ẻ˘Í§¤ĂÍĘâÍŕÇÍĂě Linkwitz-Riley
ŕ»çąĘÁÁµÔ°ŇąĘӤѷŐčä´é¨ŇˇŕĘŐ§ «Ö觶١»Ĺ´»Ĺčͨҡä´ĂŕÇÍĂěáµčĹеŃÇăąáąÇµŃé§ ”
... (ŕą×éÍËҵčͨҡµÍą·ŐčáĹéÇ..)...
¶Ń´ÁŇŕ»çą order 4th ËĂ×Í LR4/LR-4 ăą order ąŐéÍҨ¶×Íä´éÇčһѨ¨ŘşŃą¶ŮˇăŞéÍÂčҧáľĂčËĹŇ ăąÇ§ˇŇĂÍÍ´ÔâͤĂÍĘâÍŕÇÍĂě â´Ââ¤Ă§ ĘĂéҧ¨ĐŕˇÔ´¨ŇˇˇŇõčÍ cascade ˘Í§żÔĹŕµÍĂě Butterworth ¨Ňˇ order ·Őč 2nd ¨ÓąÇąĘͧŞŘ´ «Öč§ä´é¨Ř´µŃ´¤ÇŇÁŞŃąŕ·čҡѺ 24dB/octave ËĂ×Í 80dB/decade ĹѡɳСŇĂŕĹ×čÍąŕżĘ¨Đŕ·čҡѺ +/- 180 ͧČŇ â´ÂĽĹĂÇÁŕżĘµčҧˇŃą¶Ö§ 360 ͧČŇ «Öč§Áѡ¨ĐŕˇÔ´ in phase áĹШĐÁŐ»ŃËŇŕĂ×čͧ¤Ňşä·Áě´ŐŕĹÂě㹪čǧ low-pass áµčŕǡŕµÍĂěŕżĘµĂ§˘éŇÁÍÔąľŘµ áĹĐĂÇÁä´éáç´Ńąŕ·čҡѹ·Őč 1 âÇŵě... ¶Ń´ä»ŕ»çą order 8th ËĂ×Í LR8/LR-8 ĘÓËĂŃş order ąŐé ˇĂŇż¨Ř´µŃ´¤ÇŇÁŞŃą¨Đ´Ôč§Áҡ «Öč§ä´é¤čŇŕ·čҡѺ 48dB/octave ËĂ×Í 160dB/decade «Öč§ŕˇÔ´¨ŇˇˇŇõčÍ͹ءĂÁ order 4th ˘Í§żÔĹŕµÍĂě Butterworth ŕ˘éŇ´éÇ¡ѹ â´ÂŕżĘ¨ĐŕĹ×čÍą +/-360 ͧČŇ ŕżĘ¨Ö§ÁŐ¤čҵçˇŃşÍÔąľŘµáĹĐĂÇÁáç´Ńąä´é 1 âÇŵě ĘĂŘ»ÇčŇ L-R ¤ĂÍĘâÍŕÇÍĂěÁըشŕ´čąÍÂŮčËĹŇ»ĂСŇä×Í... (1) ĽĹĂÇÁ˘Í§áç´ŃąŕÍҵěľŘµ·Řˇ¤ÇŇÁ¶ŐčÁŐ¤čŇŕ·čŇŕ´ÔÁ â´ÂÍéҧÍÔ§ˇŃş¨Ř´µŃ´¤ĂÍĘâÍŕÇÍĂě... (2) ŕżĘ˘Í§ŕÍҵěľŘµÁŐ¤čŇŕ·čҡѹ·Řˇć ÂčŇą¤ÇŇÁ¶Őč ˇŇĂŃąµŐ¨ŇˇˇŇõͺʹͧâľĹŇĂě ł. ¨Ř´µŃ´¤ĂÍĘâÍŕÇÍĂě... (3) ˇŇõͺʹͧáÍÁľĹԨٴÁŐ¤ÇŇÁŕĂŐÂşµĹÍ´·ŘˇÂčŇą¤ÇŇÁ¶Őč ·Őč¨Ř´µŃ´ 24dB/octave ËĹѧ roll-off… (4) ĽĹĂÇÁ·Ň§ÍФŮʵԡĂĐËÇčҧä´ĂŕÇÍĂě 2 µŃǨĐŕ»çąÂŮąÔµŐé «Ö觡ŇõͺʹͧáÍÁľĹԨٴáµčĹТéҧ¨Đŕ»çą -6dB «Ö觨ĐäÁčľş»ŃËҡŇĂľŐ¤ŕÁ×čÍĂÇÁĘŃŇłÍФŮʵԡ·Ň§ŕÍҵěľŘµ... (5) ä´ĂŕÇÍĂě·ŘˇµŃǨĐŕËÁ×ÍąŕŞ×čÍÁµčÍĘŇÂáşşŕ´ŐÂǡѹ ąŃ蹤×ÍŕˇÔ´ˇŇĂ in phase ·Ńé§ËÁ´
ĘÔč§ËąÖ觷Őč¶ŮˇąÓä»áˇé»ŃËŇĂĐşşŕĘŐ§ äÁčÇčҨĐŕ»çąŕĂ×čͧˇŇĂ·Ó alignment ¤ĂÍĘâÍŕÇÍĂě·ŐčÍ͡Ẻâ´Â Linkwitz-Riley ·ÇčҶ×Íŕ»çąŕĂ×čͧŕĂŐÂş§čŇ·ŐčĘŘ´ â´Â·ŃčÇ仨ĐăŞéˇŃąŕľŐ§äÁčˇŐčÁҵðҹŕ·čŇąŃ鹤×Í order 2nd ˘Í§ Butterworth «Ö觵čÍ͹ءĂÁˇŃą ¤ÇŇÁ«Ńş«éÍą¨ĐŕˇÔ´˘ÖéąŕÁ×čͤÇŇÁ¶Őč˘Í§¤ĂÍĘâÍŕÇÍĂě¶Ůˇ»ĂŃşáµč§ ËĹѧ¨Ňˇ·čŇąä´éČÖˇÉŇáĹĐ»ŻÔŕʸÇÔ¸ŐˇŇĂ·Ńé§ËÁ´˘Í§Áҵðҹ·Ó§ŇąşŇ§ÍÂčҧ şĂÔÉŃ·şŇ§áËč§ µŃÇÍÂčҧ Rane ä´éľŃ˛ąŇµŃÇá»ĂĘÓËĂŃşˇŇĂáˇé»ŃËŇąŃ蹤×Í order ·Őč 4th «Öč§ŕ»çą¤ĂÍĘâÍŕÇÍĂě·Őč Linkwitz-Riley Í͡Ẻâ´Âŕ©ľŇĐ µŇÁáąÇ·Ň§ăąˇŇĂáˇé»ŃËҢͧŕ˘Ň «Öč§ÍҨ¨ĐÁŐÁҡˇÇčŇĂŘčąÍ×čąć ´éÇÂŕ˵ؼŵčÍ仹Őé... (1) ŕËÁŇĐ·Őč¨ĐăŞéˇŃşˇŇèѴˇŇĂ high-pass áĹĐ low-pass ŕÍҵěľŘµ«Öč§·Ó §ŇąľĂéÍÁć ˇŃąâ´Â¨ĐăËéÂčŇą¤ÇŇÁ¶Őčŕ´ŐÂǡѹŕĘÁÍ... (2) 㹡ŇĂŕ»ĹŐčÂąá»Ĺ§ÂčŇą¤ÇŇÁ¶ŐčĘŇÁŇöŕ»ĹŐčÂąä´éľĂéÍÁˇŃą·Ńé§ÂčŇą high-pass áĹĐ low-pass ŕÍҵěľŘµ â´Â¨ĐäÁčÁռŵčͤčŇáÍÁľĹԨٴËĂ×ͤčŇ Q (Quality factor)… (3) Sensitivity ˘Í§żÔĹŕµÍĂě¨ĐÁŐ¤čҵčÓÁҡć (Sensitivity ŕ»çąµŃÇŞŐéÇŃ´ĽĹˇĂĐ·ş˘Í§ÍŘ»ˇĂłě·ŐčäÁčŕËÁŇĐĘÁ ăą·ŐčąŐéÂÔ觵čÓÂÔ觴Ő)... (4) ŕ»çą¤ĂÍĘâÍŕÇÍĂě·ŐčÁŐ»ĂĐĘÔ·¸ÔŔŇľĘ٧Áҡ «Öč§ÁŐŞŘ´żÔĹŕµÍĂě order 4th ·ŐčşĂèŘ㹤ĂÍĘâÍŕÇÍĂě˘Í§ Rane «Öč§ŕ»çąµŃÇá»ĂËąÖč§ăąˇŇĂáˇé»ŃËŇ´éŇą¤ÇŇÁ¶ŐčŕĘŐ§ăËé·čŇąä´é
ąŃÂÂСŇþѲąŇ·ÄɮաŇĂÍ͡Ẻ˘Í§¤ĂÍĘâÍŕÇÍĂě Linkwitz-Riley ŕ»çąĘÁÁµÔ°ŇąĘӤѷŐčä´é¨ŇˇŕĘŐ§ «Ö觶١»Ĺ´»Ĺčͨҡä´ĂŕÇÍĂěáµčĹеŃÇăąáąÇµŃé§ áąčąÍąÇčŇä´ĂŕÇÍĂěäÁčÁŐ¤čҡŇĂËąčǧŕÇĹŇËĂ×Íä·Áě´ŐŕĹÂěăąµŃÇ ÁŃą¨Đ·ÓËąéŇ·ŐčÍÂčҧµĂ§ä»µĂ§ÁŇ áĹĐäÁčĘŇÁŇöËéŇÁÍҡŇĂä·Áě´ŐŕĹÂě·ŐčŕˇÔ´˘Öéąä´éŕËÁ×ÍąˇŃşşą¤ĂÍĘâÍŕÇÍĂěă´ć ˇŇ÷ӧҹĽÔ´ľĹŇ´ăąĹѡɳРlobing ¨ĐŕˇÔ´˘ÖéąŕÁ×čÍŕĘŐ§¶Ůˇ»Ĺ´»Ĺčͨҡä´ĂŕÇÍĂě·Ńé§Ęͧä»ĘŮč´éҹ˹éŇľĂéÍÁć ˇŃą
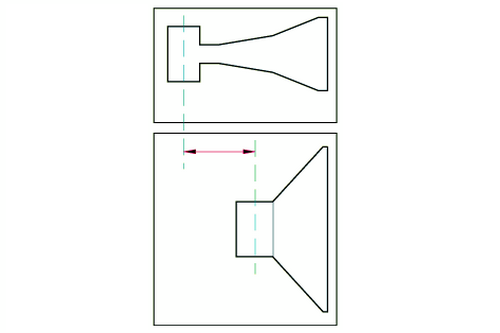
ĂŮ»ˇŇĂÇҧµÓáËąč§ä´ĂŕÇÍĂě
ăąĂŮ»ˇŇĂÇҧµÓáËąč§ä´ĂŕÇÍĂě ¨Đŕ»çąĹѡɳСŇĂÇҧä´ĂŕÇÍĂě·Ńé§Ęͧŕ·ŐÂşá·ąˇŃą
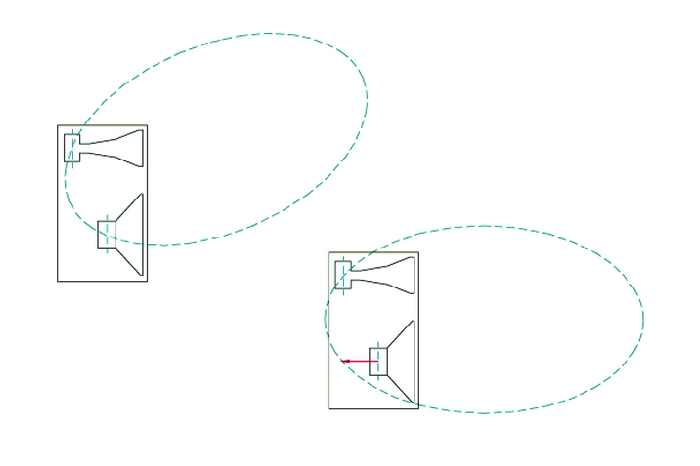
ĂŮ»ŕ»ĂŐÂşŕ·ŐÂşĹѡɳĐŕˇÔ´ lobing error áĹСŇĂáˇé»ŃËŇ´ŐŕĹÂěä·Áě ˝Ń觫éŇÂÁ×ÍäÁčÁŐ time alignment ´éŇą˘ÇŇÁŐ time alignment
ĘčÇąĂŮ»ŕ»ĂŐÂşŕ·ŐÂşĹѡɳĐŕˇÔ´ lobing error áĹСŇĂáˇé»ŃËŇ´ŐŕĹÂě ¨ĐáĘ´§ăËéŕË繶֧ˇŇĂŕ¤Ĺ×čÍą·Őč˘Í§ŕĘŐ§´Ń§ˇĹčŇÇ ¨Ňˇ´éҹ˹éŇä»´éŇąËĹѧ «Ö觷ÓăËéŕˇÔ´˘éÍĽÔ´ľĹŇ´ ąŃ蹤×ÍŔŇÇĐ lobing «Öč§äÁčÁŐˇŇèѴµÓáËąč§ăąŕĂ×čͧŕÇĹŇËĂ×Í time alignment ĘÓËĂŃş¤ĂÍĘâÍŕÇÍĂě˘Í§ Linkwitz-Riley ¨Ö§¶ŮˇąÓÁŇ»ĂĐÂءµěăŞéˇŃşä´ĂŕÇÍĂě·ŐčäÁčÍҨµÍşĘąÍ§ŕĂ×čͧˇŇèѴµÓá˹觴éŇąŕÇĹŇä´éŕͧ «Ö觡çŕËÁ×ÍąăĘčÂŇÇÔŕČÉăËéÁŃą ÍҡŇĂ lobing error ąŐé¤čҢͧÁŃąäÁčä´éŕ»çąČŮąÂě áµčĹѡɳĐĂŮ»·Ă§¨ĐŕÍŐ§áĹĐ·ÓăËéáÁ硹ԨٴŕˇÔ´ˇŇĂĽÔ´ľĹŇ´ä´é â´ÂáĘ´§ăąĂŮ»ŕ»ĂŐÂşŕ·ŐÂşĹѡɳĐŕˇÔ´ lobing error áĹСŇĂáˇé»ŃËŇ´ŐŕĹÂěä·Áě (˝Ń觺ą«éŇÂ) ¨ĐŕËçąĂŮ»·Ă§ĂŃČÁբͧ lobing ÁŃąŕÍŐ§˘Öéąä»´éŇąşą ĘčÇąĂŮ»ŕ»ĂŐÂşŕ·ŐÂşĹѡɳĐŕˇÔ´ lobing error áĹСŇĂáˇé»ŃËŇ´ŐŕĹÂěä·Áě (˝Ńč§Ĺčҧ˘ÇŇ) ¨Đŕ»çąĂŮ»·Őčä´ĂŕÇÍĂě¶Ůˇ¨Ń´µÓá˹觢ͧŕÇĹŇ«Ö觨ĐŕËçąÇčŇ lobing ¨ĐäÁčŕˇÔ´ˇŇĂŕÍŐ§«Ö觼Ť×ͨзÓăËéáÁ硹Ԩٴ·Ó§Ňąä´éŕµçÁ·Őč
µŃÇÍÂčҧǧ¨Ă¤ĂÍĘâÍŕÇÍĂěáşşľŇĘ«Őż˘Í§ order ·Őč 1st
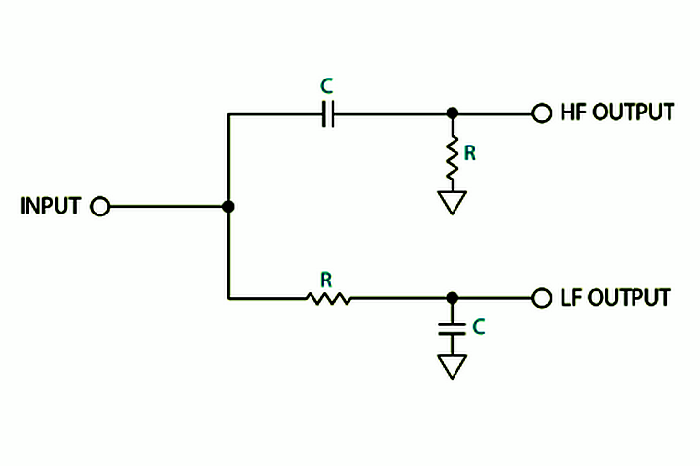
㹡ŇĂČÖˇÉҤĂÍĘâÍŕÇÍĂě ¤ÇĂŕĂÔčÁ¨ŇˇˇŇĂČÖˇÉŇǧ¨Ă¤ÇŇÁ¶Ő誹Դµčҧć ÍŇ·Ôǧ¨Ă cut-off ǧ¨Ă high-pass żÔĹŕµÍĂě ǧ¨Ă low-pass żÔĹŕµÍĂě ĘÓËĂŃşŕÍ繨ÔŕąŐÂĂě·ŐčµéͧˇŇĂŕąéąˇŇĂăŞé§ŇąáşşĂÇşĂŃ´ ÍҨ¨ĐČÖˇÉҡŇ÷ӧҹ˘Í§żÔĹŕµÍĂěáµčĹĐáşş ĂÇÁ¶Ö§ĹѡɳРorder µčҧć ŕĂÔčÁ¨Ňˇ order ·Őč 1st, 2nd, 3rd, 4th ˇçÇčŇˇŃąä» áµčĘÓËĂŃşĽŮé·ŐčÍÂҡŧĹÖˇăËéŕ˘éŇ㨶֧áˇčą ŕľ×čÍąÓä»áˇé»ŃËŇĂĐşşËĂ×ÍÍ͡Ẻ ËĂ×͵éͧˇŇĂáÁčąăąŕĂ×čͧąŐéˇçµéͧČÖˇÉҵŃé§áµčĂдѺǧ¨ĂµéąáşşˇŃąŕĹ·Őŕ´ŐÂÇ ăąÇ§¨Ă¤ĂÍĘâÍŕÇÍĂěáşşÍĐąŇĹ͡¨Đ»ĂСͺ´éÇ µŃǵéŇą·Ňą ËĂ×ÍăŞéÍѡÉĂÂčÍ R áĹĐ µŃÇŕˇçş»ĂĐ¨Ř ăŞéÍѡÉĂÂčÍ C â´ÂăąÇ§¨Ă order ·Őč 1st ¨ĐäÁčÁŐÍĐäĂÍ×čąŕĹ ąÍˇ¨Ňˇ R áĹĐ C «Ö觪ÔéąĘčÇą´Ń§ˇĹčŇÇąŐé¶ŮˇąÓÁŇăŞéăąÇ§¨ĂÍÔŕĹ硷ĂÍąÔˇĘěÍÂčҧÁҡ ŕĂ×čͧ˘Í§ R ¨Đ˘ÍŕĹčŇÂéÍąąÔ´ËąčÍ ŕĽ×čÍĽŮéÍčŇąşŇ§·čŇąäÁčä´éČÖˇÉŇÍÔŕĹ硷ĂÍąÔˇĘěÁŇâ´ÂµĂ§ ¶éŇ·čŇą·ĂŇş´ŐÍÂŮčáĹéǡç˘ÍăËé˘éŇÁŕą×éÍËŇĘčÇąąŐéä»ä´é...

ĹѡɳРR ˘ąŇ´Áѡ¨Đşč§şÍˇÍѵĂŇ·ąˇÓĹѧÇѵµě¨ŇˇąéÍÂä»Áҡ

ĹѡɳРR áşşˇĂĐŕş×éͧ·ąÇѵµěáµč¤ÇŇÁ¤ĹŇ´ŕ¤Ĺ×čÍąĘ٧ ăąŔŇľÁŐŕ»çą˘ąŇ´·Ńé§ 5 Çѵµě
ĘÓËĂŃş µŃÇŕˇçş»ĂĐ¨Ř ËĂ×Í ¤Ň»Ň«ÔŕµÍĂě (C; Capacitor) ŕ»çąÍŘ»ˇĂłěÍÔŕĹ硷ĂÍąÔˇĘěľ×éą°ŇąµŃÇËąÖč§ ÁŐËąčÇÂŕ»çą "żŇĂŃ´" (F) ·ÓËąéŇ ·ŐčŕˇçşľĹѧ§ŇąăąĘąŇÁäżżéŇ ·ŐčĘĂéҧ˘ÖéąĂĐËÇčҧ¤Ů詹ǹ «Öč§ÁŐ¤čŇ»ĂШŘäżżéŇŕ·čҡѹ áµčÁŐşŇ§ŞąÔ´·ŐčÁŐ»ĂШصç˘éŇÁˇŃą â´Â·ŃčÇä»·čŇąĘŇÁŇöľşä´éăąÇ§¨ĂÍÔŕĹ硷ĂÍąÔˇĘěŕËÁ×Íą R… Ëҡ¶ŇÁÇčŇÁŃą·Ó§ŇąÂѧä§...? áĹĐ·ÓäÁµéͧŕÍŇÁŇăŞéăąÇ§¨Ă¤ĂÍĘâÍŕÇÍĂě...? µŃÇ C ¨Đ·Ó§ŇąĘͧʶҹР¤×Í·ÓËąéŇ·Őčŕˇçş»ĂШŘáĹФŇ»ĂĐ¨Ř ŕÁ×čÍÍÂŮčăąĘ¶ŇąĐŕˇçş»ĂШŘÁŃą¨Đ´Ů´ÍÔŕĹ硵ĂÍąä»äÇé·ŐčáĽčąŕľĹµ 㹡óշŐč»ĹčÍÂäżżéҢŃéÇĹşŕ˘éŇä» ÁŃą¨Đ´Ö§ÍÔŕĹ硵ĂÍą¨ŇˇáËĹ觨čŇÂäżŕ˘éŇä»ĂÇÁˇŃą·ŐčáĽčąŕľĹµ ·ÓăËéŕˇÔ´»ĂШŘĹş˘Öéą ˘łĐŕ´ŐÂǡѹÁŃąˇç¨ĐĽĹѡÍÔŕĹ硵ĂÍąä»Âѧ˝Ń觵ç˘éŇÁ ľÍÁŃąĽĹѡä»ŕÂÍĐćŕľĹµ´Ń§ˇĹčŇǨĐÁŐáµč»ĂШغǡÁҡˇÇčŇ ŕÁ×čÍŕˇçşáĹéǡçµéͧ¤ŇÂäÁč§ŃéąÍҨ·éͧᵡä´é... (ÎŇ) ʶҹСŇĂŕˇçş»ĂШŘŕ·ŐÂşä´éˇŃşˇŇĂŞŇĂě¨äżŕ˘éŇä»áşµŕµÍĂŐč ¶éŇäÁčÁŐˇŇõčÍǧ¨ĂÍÂčҧĘÁşŮĂłě ÍÔŕĹ硵ĂÍąÁŃą¨ĐÂѧ˝Ń§µŃÇÍÂŮčáĽčąŕľĹµąŃéą ŕÁ×čÍäËĂč·Őčµčͤú·Ńé§Ęͧ´éŇą (˘ŃéǺǡáĹĐĹş) ÍÔŕĹ硵ĂÍąˇç¨ĐÇÔ觨ҡáĽčąŕľĹµ¨Ňˇ˝Ńč§Ĺş ä»áĽčąŕľĹµşÇˇ·Ńą·Ő ¨Ö§ŕĂŐ¡ÇčҡŇäŇ»ĂШعŃčąŕͧ ·ŐąŐéµŃÇŕˇçş»ĂШطŐčăŞéˇŃą·ŃčÇä»ÁŐÍÂŮčĘͧẺ¤×Í áşş¤čҤ§·ŐčˇŃşáşşŕ»ĹŐčÂą¤čŇä´é áĹĐ㹪ąÔ´¤čҤ§·ŐčąŃéą ÁŐËĹŇÂáşşăËéŕĹ×͡ (ąčҨĐĘѡ 7 áşş áµč¤§äÁčŕÍŇÁŇŕĹčŇ·Ńé§ËÁ´) ĘÓËĂѺǧ ¨Ă¤ĂÍĘâÍŕÇÍĂě¨ĐąÔÂÁăŞéµŃÇŕˇçş»ĂШŘáşşâľĹŐâľĂäľĹŐą ăąÇ§ˇŇĂŕĂŐ¡Ş×čÍÂčÍÇčŇ MKP ŕ»çąµŃÇŕˇçş»ĂШطŐčÁŐ»ĂĐĘÔ·¸ÔŔŇľĘ٧ˇÇčŇ áĹĐĘŇÁŇö·Ó§Ňąä´é·Ńé§áç´ŃąˇĂĐáʵçáĹСĂĐáĘĘĹŃş ¶éҷӧҹˇŃşˇĂĐáĘĘĹŃşÁŃą¨Đŕ»ĹŐčÂąâËÁ´µŃÇŕͧ价ӧҹ¤ĹéҵŃÇŕˇçş»ĂШŘáşşâľĹŐĘäµĂŐą ËĂ×Í MKS (ËŇ«×é͵ŇÁĂéŇąăËčć ăąşéŇąËÁéÍ ËĂ×ÍĂéŇąÍÔŕĹ硷ĂÍąÔˇĘěŞŃéąąÓ ŕŞčą ş.ąŃ°ľ§ÉěĎ ˇçÁŐ˘ŇÂ)
ˇŇĂąÓ R ˇÓĹѧÇѵµěµčÓËĹҵŃÇÁŇ»ĂĐÂءµěăŞéá·ą R ÇѵµěĘ٧
ÍŘ»ˇĂłěÍÔŕĹ硷ĂÍąÔˇĘě˘Í§Ç§¨Ă¤ĂÍĘâÍŕÇÍĂě·Őč˘Ň´äÁčä´é¤×Í µŃÇŕËąŐčÂÇąÓ ËĂ×Í Inductor ăŞéĘŃĹѡɳě L şŇ§·ŐÍҨ¨ĐŕĂŐ¡ÇčŇ ¤ÍÂĹě ËĂ×Í ĂŐáͤŕµÍĂě áĹéÇáµč¨ĐŕĂŐ¡ˇŃą â´ÂÁŐËąčÇÂŕ»çą H "ŕÎąĂŐ" ÁŐĘͧ˘Ň·Ó§Ňąŕ»çąľŇĘ«Őż â´ÂÁŐËąéŇ·Őč»éͧˇŃąˇŇĂŕ»ĹŐčÂąá»Ĺ§˘Í§ˇĂĐáĘäż żéŇ·ŐčäËĹĽčŇąµŃÇÁŃą ĹѡɳĐĂŮ»Ăčҧŕ»çąĹÇ´·Í§á´§ÁéÇąˇĹÁć «Öč§ÁŐ·Ńé§áşşáˇąáĹĐäĂé᡹ ŕÁ×č͡ĂĐáĘäËĹĽčŇą ľĹѧ§Ňą¨Đ¶ŮˇˇŃˇäÇéŞŃčǤĂŇÇăąĂŮ»˘Í§ĘąŇÁáÁčŕËĹçˇÍÂŮčăąµŃÇŕËąŐčÂÇąÓ ŕÁ×č͡ĂĐáĘąŃéąÁŐˇŇĂŕ»ĹŐčÂąá»Ĺ§ä» â´ÂĘąŇÁáÁčŕËĹ硹Ń鹨ĐÁŐá»ĂĽŃąµŇÁŕÇĹŇ ¨Ö§·ÓăËéŕˇÔ´áç´Ńąäż żéŇăąµŃÇąÓ ·ŐąŐéˇçŕ˘éҡ®˘Í§żŇĂŇŕ´Âě ·ŐčĘĂŘ»äÇéÇčŇ ÁŃą¨ĐŕˇÔ´ˇŇõéŇąˇŇĂŕ»ĹŐčÂąá»Ĺ§˘Í§ˇĂĐáĘ·ŐčÁŃąĘĂéҧ˘Öéą µŃÇŕËąŐčÂÇąÓ¶×Íŕ»çąÍŘ»ˇĂłěËąÖč§ăąĘŇÁ¤×Í R, C áĹĐ L ¶ŮˇąÓä»ăŞéăąÇ§¨ĂľŇĘ«Őż¤ĂÍĘâÍŕÇÍĂěáĹĐǧ¨ĂľŇĘ«ŐżÍ×čąć Áҡ·ŐčĘŘ´ «Ö觨شŕ´čą˘Í§ L şŇ§ŞąÔ´¨ĐäÁčÂÍÁăËéäż AC äËĹĽčŇą ¨ĐÂÍÁăËéŕ©ľŇĐ DC ĽčŇąŕ·čŇąŃéą ŕŞčą âŞé¤ áĹĐÂѧĘŇÁŇöăŞéăąÇ§¨ĂżÔĹŕµÍĂěŕľ×čÍá¡ĘŃŇł·ŐčÁŐ¤ÇŇÁ¶ŐčᵡµčҧˇŃąáĹĐăŞéĂčÇÁˇŃşµŃÇ C ŕľ×čÍăËéĘŇÁŇö»ĂŃşËҤÇŇÁ¶Őčä´é ÍÂčҧŕŞčąˇŇĂËҤÇŇÁ¶ŐčÇÔ·ÂŘ ŕĂҤ§äÁčŧĹÖˇ¶Ö§ĂĐ´Ńş·ÄÉ®Őǧ¨Ă ŕˇĂ§¨ĐËĹŘ´¤Íąŕ«ç»µě˘Í§ş·¤ÇŇÁąŐé
ˇŇĂąÓ R ˇÓĹѧÇѵµěµčÓËĹҵŃÇÁŇ»ĂĐÂءµěăŞéá·ą R ÇѵµěĘ٧
ˇŇĂąÓ R ˇÓĹѧÇѵµěµčÓËĹҵŃÇÁҵčÍŕľÔčÁˇÓĹѧÇѵµě

ŔŇľ C ŞąÔ´ MKP

ŔŇľ C ŞąÔ´ MKS

ŔŇľ˘´ĹÇ´ŕËąŐčÂǹӾѹĘÓŕĂç¨ĂŮ»ľĂéÍÁăŞé§Ňą
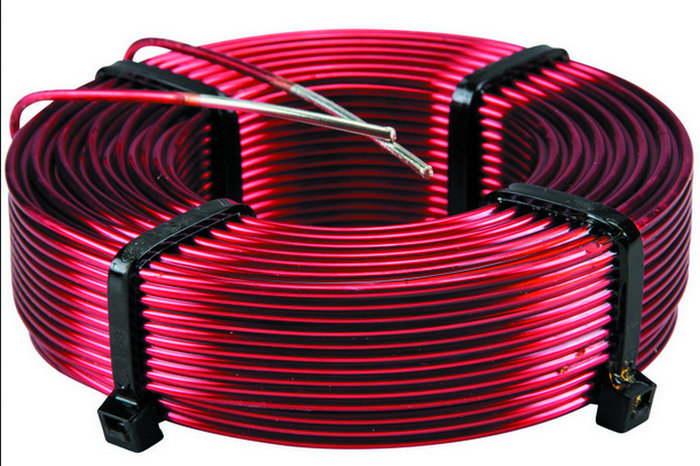
ŔŇľ˘´ĹÇ´¤čŇ 1.8mH ˘ąŇ´ 14AWG

ŔŇľ˘´ĹÇ´¤čŇ 0.3mH ˘ąŇ´ 20AWG

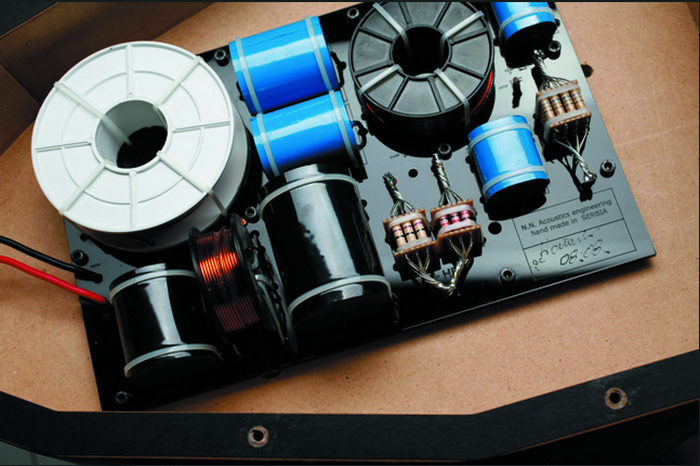
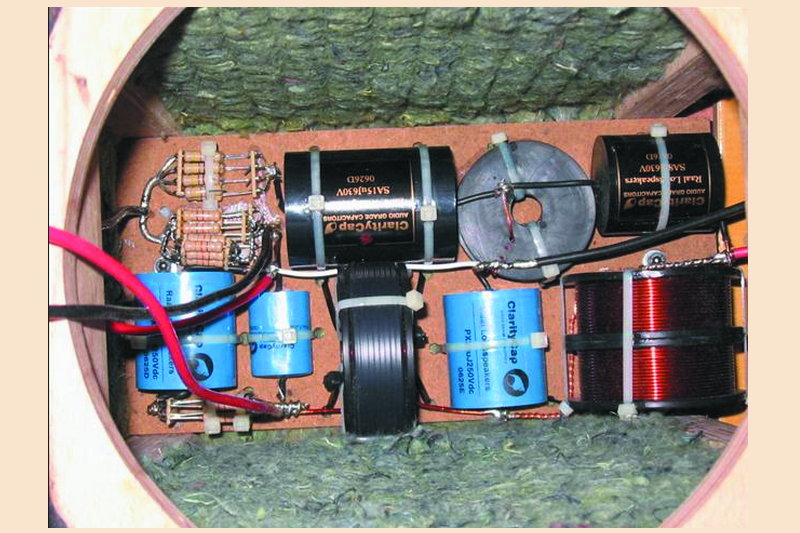
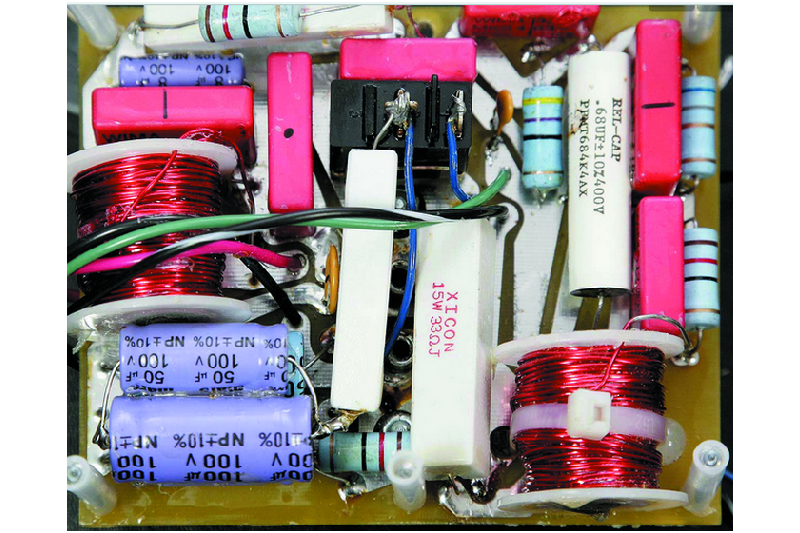
¤ĂÍĘâÍŕÇÍĂěµŃÇąŐéÁŐÍŘ»ˇĂłěŕˇ×Íş·ŘˇŕˇĂ´
¤ĂÍĘâÍŕÇÍĂěŕ»çąµŃǨѴĘĂäě¤ÇŇÁ¶Őč â´ÂÁŐǧ¨ĂˇĂͧ¤ÇŇÁ¶ŐčËĂ×ÍżÔĹŕµÍĂ쪹ԴµčŇ§ć şĂèŘÍÂŮčŔŇÂăą... ·ÓäÁ¨Ö§µéͧˇĂͧ¤ÇŇÁ¶Őč ŕÇĹŇŕĘŐ§ÍÂŮčăąĂĐşşäżżéŇ ŕÁ×čÍÁŃą¶čŇ·ʹĽčŇąĹÓ⾧ËĂ×Íä´ĂŕÇÍĂě ŕĘŐ§ąŃ鹨ж١»ĹčÍÂĽčŇąä´ĂŕÇÍĂě «Ö觻Ѩ¨ŘşŃąäÁč¤čÍÂąÔÂÁăŞéä´ĂŕÇÍĂě·ŐčĘŇÁŇöµÍşĘąÍ§·ŘˇÂčŇą¤ÇŇÁ¶Őč (20Hz-20kHz) ŔŇÂăąµŃÇŕ´ŐÂǡѹ áÁé¨ĐÁŐˇŇĂ·Óä´ĂŕÇÍĂ쪹ԴżŮĹŕèąěËĂ×Íâ¤áͤŕŞŐÂĹÍ͡ÁҡçµŇÁ ĘÓËĂŃşżŮĹŕĂą¨ěËĂ×Íâ¤áͤŕŞŐÂĹÂѧäÁčĘŇÁŇöµÍşĘąÍ§ŕĂ×čͧˇÓĹѧ˘ŃşĘŮ§ć ¨Ń´ć ä´é ŕ˵ؼšçŕľĂŇĐÇčŇ ˇŇĂ·Őč¨ĐĘĂéҧä´ĂŕÇÍĂě·ŐčµÍşĘąÍ§·ŘˇÂčŇą¤ÇŇÁ¶ŐčáĹĐăËéˇÓĹѧ˘ŃşĘŮ§ć ąčҨзÓăËéÁյ鹷عĘ٧ÍÂŮčáĹĐ µŃÇÍÂčҧä´ĂŕÇÍĂě«ŃşÇŮŕżÍĂě ¶éŇ»éÍą¤Ĺ×蹤ÇŇÁ¶Őč 50Hz ĽĹ¨Đ·ÓăËéĹÓ⾧ĘŃčą 50 ¤ĂŃ駵čÍÇÔąŇ·Ő áĹĐä´ĂŕÇÍĂě¨ĐÁŐŕĘŐ§´Ń§ä´é ¤Ĺ×čąąŃéąµéͧÁŐáÍÁľĹԨٴ ÂÔ觴ѧÁҡä´ĂŕÇÍĂě¨ĐµéͧĘŃčąĂŘąáçÁҡ áĹеéͧÁŐ Sensitivity ·ŐčĘŮ§ć ¶ŇÁÇčŇáĹéÇä´ĂŕÇÍĂě·ŐčŕĂŇ»éÍąÁŃąµÍşĘąÍ§µčͤÇŇÁ¶ŐčąŃéąËĂ×ÍäÁč »ˇµÔä´ĂŕÇÍĂě·ŐčµÍşĘąÍ§ÂčŇą¤ÇŇÁ¶ŐčµčÓ ¨ĐÁŐĘŕ»çˇ»ĂĐÁŇł 20-200Hz «Öč§ŕ»çą¤Íą«ŮÁŕÁÍĂěâ»Ă´Ńˇ«ě 㹧ҹäĹżě«ŇÇ´ě˘Í§Á×ÍÍŇŞŐľ¨ĐŕĹ×͡ăŞé˘ąŇ´·ŐčµčÓˇÇčŇ 100Hz ËĂ×ÍăąâçŔҾ¹µĂěĂĐşş THX ¨ĐŕĹ×͡ăŞéµčÓˇÇčŇ 80Hz µŃǺʹŐéÁѡ¨ĐÁŐˇĂÇ¢ąŇ´ăËč µŃé§áµč 5 ąÔéÇ 8 ąÔéÇ 10 ąÔéÇ 12 ąÔéÇ 18 ąÔéÇËĂ×Í 21 ąÔéÇ ÇŃʴبеͺʹͧˇŇáĂĐľ×ÍăąÍѵĂҤÇŇÁŕĂçǵčÓ ŕľĂŇĐĽąŃ§ˇĂÇÂÁŐÁÇĹÁҡ·ÓăËéµÍşĘąÍ§ˇŇĂĘŃčą·ŐčĂŘąáçä´é´Ő ÍÂčҧäáç´Ő ¤ÇĂŕŞç¤Ęŕ»çˇä´ĂŕÇÍĂě¨Đ·ÓăËéĂŮéÇčŇÁŃąµÍşĘąÍ§¤ÇŇÁ¶ŐčµŃé§áµčˇŐčŕÎÔõ«ě¶Ö§ˇŐčŕÎÔõ«ě

B&C ĂŘčą 15CXN76
¶Ń´ä» ĹÓ⾧ŕĘŐ§ˇĹҧ ËĂ×Í ÁÔ´ŕèąě ¤ŘłĘÁşŃµÔ¨ĐµÍşĘąÍ§µčͤÇŇÁ¶ŐčÂčŇąˇĹҧć ä´é´Ő â´Â·ŃčÇ仨еͺʹͧ¤ÇŇÁ¶ŐčŞčǧ 300 ¶Ö§ 5kHz ¶éҵéͧˇŇĂăËéŕĘŐ§ˇĹҧÍ͡ÁŇŞŃ´¤ÇĂăŞéä´ĂŕÇÍĂ쪹ԴąŐé µŃǺʹŐé¨ĐÁŐˇĂÇÂäÁčăËč «Öč§ÁŐĂŮ»·Ă§ËĹŇÂáşş ·Ńé§áşşÎÍĂěą áşşâ´ÁáĹéÇáµčĽŮéĽĹÔµ¨ĐÍ͡Ẻ ĘčÇąăËč¨ĐąÔÂÁăŞéˇŃşŕ¤Ă×čͧăŞéäżżéŇŔŇÂăąşéŇą ăąŕ¤Ă×čͧâ·Ă·ŃČąě ÇÔ·ÂŘ ĘÓËĂŃş§ŇąľŐŕÍ ¨ĐăŞéËĹŇ¢ąŇ´µŃé§áµč˘ąŇ´ 6.5 ąÔéǶ֧ 15 ąÔéÇ â´ÂĘĂŘ»¤×͵ͺʹͧ¤ÇŇÁ¶ŐčÂčŇąäÁčµčÓŕˇÔąä»áĹĐäÁčĘ٧¨ąŕˇÔąä»... ¶Ń´ä» ä´ĂŕÇÍĂěŕĘŐ§áËĹÁ ËĂ×Í ·ÇŐµŕµÍĂě ÁŐĹѡɳТąŇ´ŕĹçˇáĹĐăËéŕĘŐ§Ę٧¨Ń´ â´Â·ŃčÇä»ÁŐăËéŕĹ×͡·Ńé§áşşâ´ÁáĹĐáşşÎÍĂěą ¤ŘłĘÁşŃµÔ¨ĐµÍşĘąÍ§¤ÇŇÁ¶Őč»ĂĐÁŇł 2k-20kHz »Ń¨¨ŘşŃąÁŐ·ÇŐµŕµÍĂ쪹ԴľÔŕČÉ·Őč·Ó´éÇÂĂÔşşÍąĘŇÁŇöµÍşĘąÍ§¤ÇŇÁ¶Őčä´éĘ٧¶Ö§ 80kHz-100kHz ÍŃą·Őč¨ĂÔ§ÂčŇąąŐéÁŃąŕˇÔą·ŐčË٤ąŕĂҨĐĂŃşä´é áµčĽŮéĽĹÔµąčҨĐÁŐŕ˵ؼĹÇčŇ·ÓÁŇŕľ×čÍÍĐäĂ áĹĐä´ĂŕÇÍĂěÍŐˇ»ĂĐŕŔ··ŐčąčҨѺµŇÁͧ¤×Í áşşâ¤áÍç¤ŕŞŐÂĹ ŔŇÂăąä´ĂŕÇÍĂěµŃÇŕ´ŐÂÇĘŇÁŇöµÍşĘąÍ§¤ÇŇÁ¶Őčä´éˇÇéҧÁҡµŃé§áµč 40Hz-18kHz ÂŐčËéÍ B&C ĽĹÔµËĹŇÂÁŇăËéŕĹ×͡ËĹŇÂĂŘčąµŃé§áµč 5 ąÔéǨą¶Ö§ 15 ąÔéÇ áµčÍÔÁľŐá´ą«ěĘčÇąăËč¨Đŕ»çą 8 âÍËěÁ«Ö觶éҵéͧˇŇĂăËéŕËĹ×Í 4 âÍËěÁµéͧąÓä´ĂŕÇÍĂě 2 µŃÇÁҵč͢ąŇąˇŃą¨Đä´éÍÔÁľŐá´ą«ěĂÇÁŕ·čҡѺ 4 âÍËěÁ ÍÂčҧäáç´Ő â¤áÍç¤ŕŞŐšÓĹѧ˘ŃşäÁčĘ٧ąŃˇ»ĂĐÁŇł 800 Çѵµě (B&C ĂŘčą 15CXN76) ąčҨĐŕËÁŇĐĘÓËĂŃşˇŇĂąÓÁŇ»ĂСͺµŮéáÍÁ»ě µŮéá˘Çą ·Óä«´ěżŐĹ´ěËĂ×ÍÁÍąÔŕµÍĂě¨ĐŕËÁŇĐÁҡ ŕľĂŇеͺʹͧ¤ÇŇÁ¶Őčä´éĘĐ㨨ĂÔ§ć áµčˇÓĹѧ˘ŃşµÓáËąč§ŕÁąľŐŕÍÍҨ¨ĐäÁč¨Ř㨢ŇâË´
ŕÁ×čÍ·ĂŇş¤ŘłĘÁşŃµÔ˘Í§ä´ĂŕÇÍĂěáµčĹĐ»ĂĐŕŔ·áĹéÇ ·ÓăËéŕĂŇĂŮéÇčŇ ˇŇèѴµÓáËąč§ÂčŇą¤ÇŇÁ¶Őčµčҧć ăËéä´ĂŕÇÍĂěąŃéąÁŐ¤ÇŇÁĘÓ¤ŃÍÂčҧ äĂ ĹÓ´ŃşµčÍä»ŕĂҨĐÁŇČÖˇÉŇľ×鹰ҹǧ¨ĂˇĂͧ¤ÇŇÁ¶ŐčáµčĹĐ»ĂĐŕŔ·ˇŃą «Ö觹Ń蹡ç¤×Íǧ¨ĂżÔĹŕµÍĂěąŃčąŕͧ ¨ĐŕËçąÇčҡŇĂÍ͡ẺĂĐşşŕĘŐ§¨Ó ŕ»çąµéͧăŞé¤ĂÍĘâÍŕÇÍĂě·Őč»ĂСͺ´éÇ ÂżÔĹŕµÍĂěáµčĹĐŞąÔ´ÁҨѴˇŇáѺÂčŇą¤ÇŇÁ¶Őč ŕżĘ áÍÁľĹԨٴ ĂÇÁ¶Ö§ä·Áě´ŐŕĹÂěÍŐˇ´éÇÂ...
... (â»Ă´µÔ´µŇÁÍčŇąµÍąµčÍä»..)...
ʧǹĹÔ˘ĘÔ·¸Ôě µŇÁľĂĐĂŇŞşŃѵÔĹÔ˘ĘÔ·¸Ôě ľ.Č. 2539 www.thailandindustry.com
Copyright (C) 2009 www.thailandindustry.com All rights reserved.
˘ÍʧǹĘÔ·¸Ôě ˘éÍÁŮĹ ŕą×éÍËŇ ş·¤ÇŇÁ áĹĐĂŮ»ŔŇľ (ăąĘčÇą·Őč·Ó˘Öéąŕͧ) ·Ńé§ËÁ´·Őč»Ăҡ®ÍÂŮčăąŕÇçşä«µě www.thailandindustry.com ËéŇÁÁÔăËéşŘ¤¤Ĺă´ ¤Ń´Ĺ͡ ËĂ×Í ·ÓĘÓŕąŇ ËĂ×Í ´Ń´á»Ĺ§ ˘éͤÇŇÁËĂ×Íş·¤ÇŇÁă´ć ˘Í§ŕÇçşä«µě ËҡĽŮéă´ĹĐŕÁÔ´ äÁčÇčҡŇĂĹ͡ŕĹŐÂą ËĂ×ÍąÓĘčǹ˹Öč§Ęčǹ㴢ͧş·¤ÇŇÁąŐéä»ăŞé ´Ń´á»Ĺ§ â´ÂäÁčä´éĂѺ͹Řҵŕ»çąĹŇÂĹѡɳěÍѡÉĂ ¨Đ¶Ůˇ´ÓŕąÔą¤´Ő µŇÁ·Ő衯ËÁŇÂşŃѵÔäÇéĘ٧ĘŘ´