ľ§ČěľŃą¸Řě »ĂÔÂǧČě
·ş·ÇąáĹĐ·Ó¤ÇŇÁŕ˘éŇă¨ăąŕĂ×čͧĘÁŇĂě·ˇĂÔ´˘Í§â¤Ă§˘čŇ·ҧ俿éŇ
ˇŇĂĂÇÁąÇѵˇĂĂÁÍŘ»ˇĂłěáĹĐĘÁŇĂě·ˇĂÔ´ŕ˘éҡѺĂĐşşĘ觨čŇ¡ÓĹѧ俿éŇ ¨ĐĘ觼ĹăËéĹѡɳСŇ÷ӧҹ˘Í§ĂĐşşŕˇÔ´ˇŇĂŕ»ĹŐčÂąá»Ĺ§¨ŇˇĘáµµÔˇˇĹŇÂŕ»çąä´ąŇÁÔˇÁҡ˘Öéą «Öč§ăąµÍąąŐé¨Đä´éŕľÔčÁŕµÔÁĂŇÂĹĐŕÍŐ´áąÇ·Ň§˘Í§ŕ·¤âąâĹÂŐ·ŐčăŞéăąĘÁŇĂě·ˇĂÔ´ ŕľ×čÍ»ĂСͺˇŇĂľÔ¨ŇĂłŇăąŕŞÔ§˘Í§ˇŇĂÇҧἹ ˇŇĂ´ÓŕąÔąˇŇĂ áĹмšĂĐ·ş·ŐčÍҨŕˇÔ´˘Öéą â´Â¨Đáşč§Í͡ŕ»çąËŃǢéÍÂčͤ×Í áąÇ¤Ô´ ÍŘ»ˇĂłě ˇŇĂăŞé§Ňą áĹСŇõԴµčÍĘ×čÍĘŇĂ ËĹѧ¨ŇˇąŃ鹨Đä´é͸ԺҶ֧ÁŘÁÁͧĂĐşşĘŇĂĘąŕ·Č˘Í§ĘÁŇĂě·ˇĂÔ´áĹСŇĂÇÔŕ¤ĂŇĐËěĹѡɳĐâ¤Ă§˘čŇÂŔŇÂăąĘÁŇĂě·ˇĂÔ´
1.1 áąÇ¤Ô´
ăąĘčÇą˘Í§áąÇ¤Ô´·ŐčŕˇŐčÂǢéͧˇŃşĘÁŇĂě·ˇĂÔ´·Őč¨ĐˇĹčŇǶ֧»ĂСͺ´éÇ ĂĐşşŕˇçşĘĐĘÁľĹѧ§Ňą ˇŇâąĘč§â´ÂăŞéľĹѧ§ŇąäżżéŇ ĂĐşşÍѵâąÁѵԢͧŔҤÍصĘŇˡĂĂÁ ¤ÇŇÁ»ĹÍ´ŔŃ áĹСŇĂ·´ĘÍş
1.1.1 ĂĐşşŕˇçşĘĐĘÁľĹѧ§Ňą
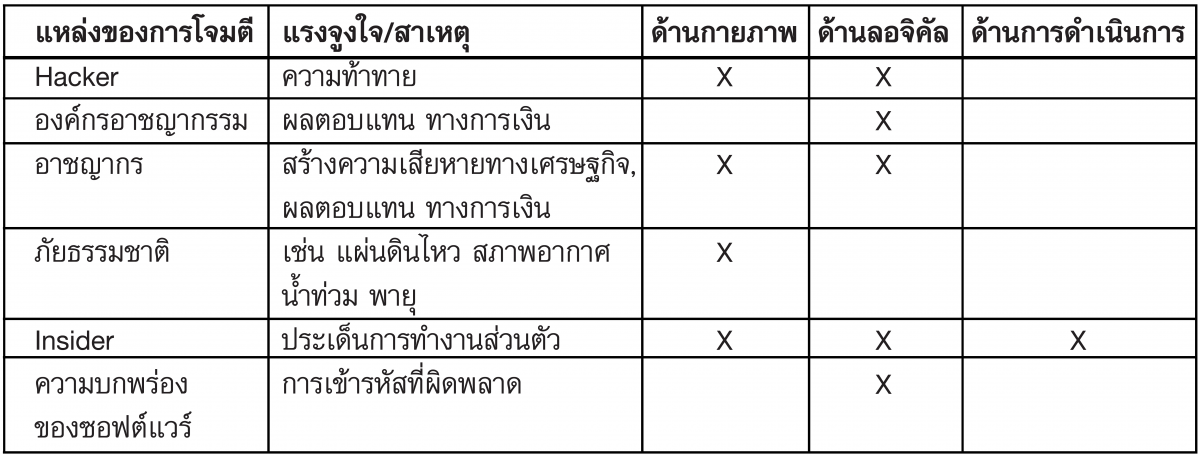
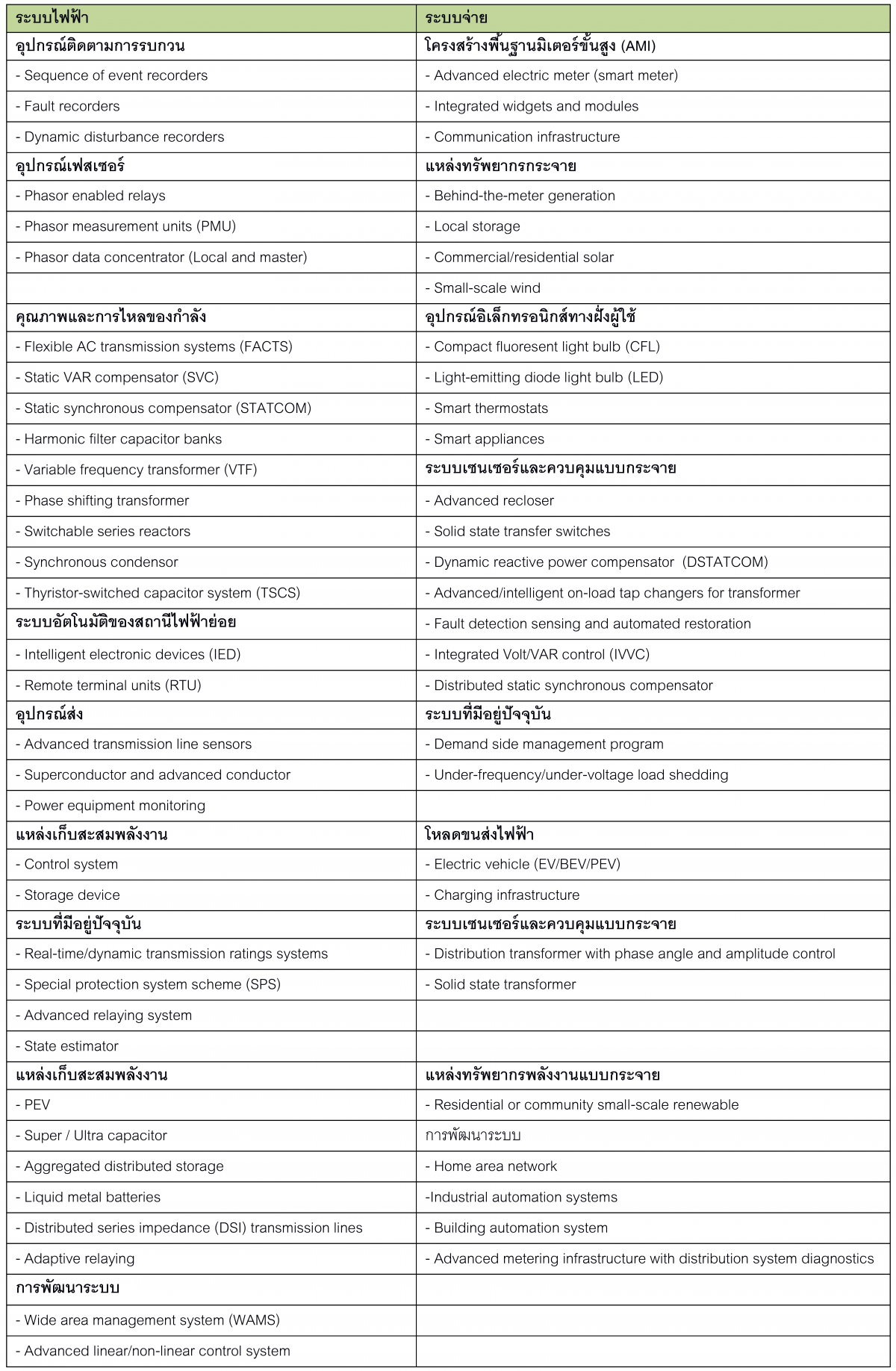
ĂĐşşŕˇçşĘĐĘÁľĹѧ§ŇąÁŐËąéŇ·ŐčĘÓ¤Ń㹡ŇĂŕĘĂÔÁĘĂéҧŕʶŐÂĂŔŇľăËéˇŃşŔҤˇŇĂĽĹԵ㹪čǧŕÇĹҵčҧ ć «Öč§ÁŐÍѵĂҡŇĂăŞéľĹѧ§Ňąŕ»ĹŐčÂąá»Ĺ§ÍÂŮčµĹÍ´ŕÇĹŇ â´Â㹻Ѩ¨ŘşŃąĂĐşşĘčÇąąŐéä´éŕ˘éŇÁŇÁŐş·şŇ·ŕľÔčÁÁҡ˘Öéą ŕą×čͧ¨Ňˇ¤ÇŇÁˇéŇÇËąéҢͧ෤âąâĹÂŐˇŇĂŕˇçşĘĐĘÁľĹѧ§Ňą áĹĐÁŘÁÁͧ´éŇąŕČĂÉ°ČŇʵĂě·ŐčŕˇÔ´¨ŇˇˇŇĂŕŞ×čÍÁµčͧ͢ˇĂÔ´ «Ö觺ҧ»ĂĐŕ·Čä´éăËé¤ÇŇÁĘӤѡѺĂĐşşŕˇçşĘĐĘÁľĹѧ§Ňą´éÇ¡ŇĂĂĐşŘäÇé㹢é͡ÓËą´ĹѡɳТͧĘÁŇĂě·ˇĂÔ´ ŕŞčą ͧ¤ěˇĂ EISA (Energy Independence and Security Act) ăą»ĂĐŕ·ČĘËĂŃ°ÍŕÁĂÔˇŇ ĘÓËĂŃşŕ·¤âąâĹÂŐˇŇĂŕˇçşĘĐĘÁľĹѧ§Ňą·ŐčąčŇʹ㨨ĐáĘ´§ÍÂŮčăąµŇĂҧ·Őč 1
µŇĂҧ·Őč 1 ŕ·¤âąâĹÂŐˇŇĂŕˇçşĘĐĘÁľĹѧ§Ňą

1) ĹéÍŞčÇÂáç (flywheel) ¤×Í ˇŇĂĘĐĘÁľĹѧ§Ňą¨ĹąěĽčŇąˇŇĂËÁŘą˘Í§ˇéŇąŕľĹŇ ŕľ×čÍ·ÓăËéŕˇÔ´ľĹѧ§Ňą¨ŇˇáçËÁŘą·Őč¤ĹéŇ¡Ѻŕ¤Ă×čͧ¹µěĹ١ĘŮş «Ö觨Đä»ËÁعǧĹéÍ·ÓăËéŕˇÔ´ŕ»çąâÁŕÁąµŃÁ˘Öéą ĹéÍŞčÇÂáç»ĂСͺ´éÇ áşĂÔč§ ÁÍŕµÍĂěäżżéŇ ŕ¤Ă×čͧˇÓŕąÔ´äżżéŇ áĹĐǧĹéÍľĂéÍÁŞŘ´ˇéŇąŕľĹŇ ĹéÍŞčÇÂáçáşč§Í͡ä´éŕ»çą 2 »ĂĐŕŔ·µŇÁáąÇ᡹ËÁŘą˘Í§ŕľĹҢѺǧĹéÍ ä´éáˇč áąÇ᡹µŃé§ áĹĐáąÇ᡹ąÍą
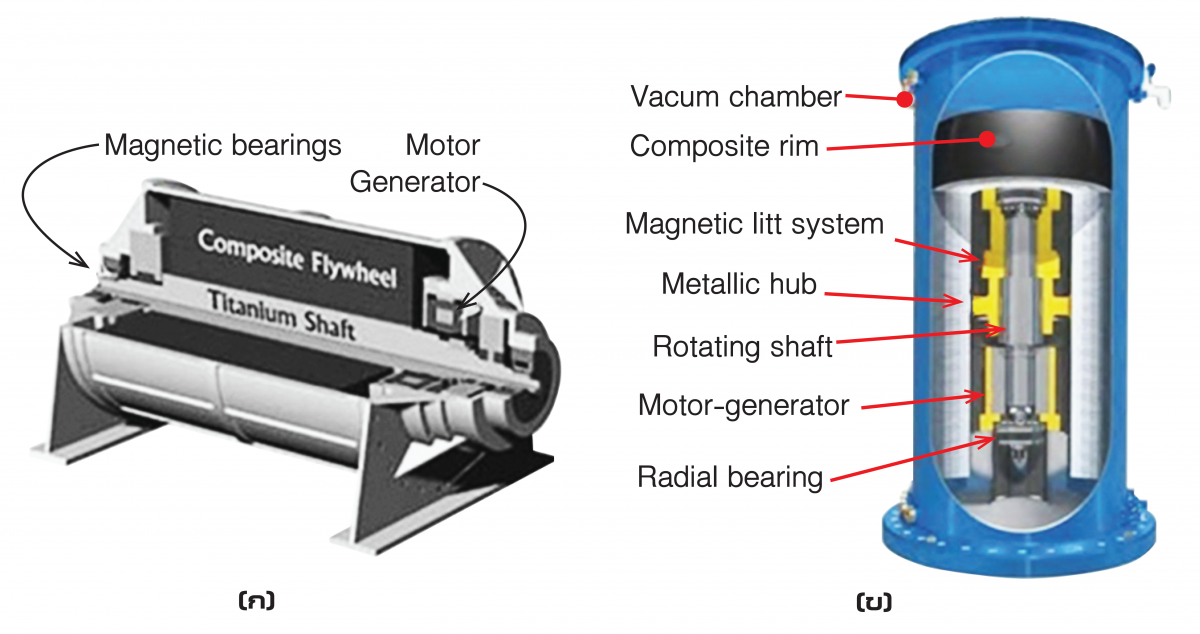
ĂŮ»·Őč 1 ĹéÍŞčÇÂáç (ˇ) áąÇ᡹ąÍą (˘) áąÇ᡹µŃé§
2) ˇŇĂÍŃ´ÍҡŇČ (compressed air energy storage, CAES) ¤×Í ŕ·¤âąâĹÂբͧˇŇĂÍŃ´ÍҡŇČŧăąâľĂ§˘ąŇ´ăËčăµéľ×éą´Ôą â´Â¨ĐąÓľĹѧ§ŇąäżżéŇ·ŐčŕËĹ×ͨҡˇŇĂşĂÔâŔ¤Şčǧ off-peak ÁŇăŞé㹡ŇâѺŕ¤Ĺ×čÍąÁÍŕµÍĂěäżżéŇ ŕľ×čÍÍŃ´ÍҡŇČ´éǤÇŇÁ´ŃąĘ٧ŕ˘éŇĘŮčâľĂ§ăµéľ×éą´Ôą ŕÁ×čÍÍҡŇȶ١ÍŃ´´éÇÂáç´ŃąĘ٧ ¨ĐĘ觼ĹăËéÍŘłËŔŮÁԢͧÍҡŇČŕľÔčÁ˘Öéą ŕÁ×č͵éͧˇŇĂąÓŕÍŇÍҡŇČĂéÍą·ŐčĘĐĘÁÍÂŮčÁŇăŞé§Ňą ˇçĘŇÁŇö·Óâ´ÂˇŇĂÍŘčąÍҡŇČ´éÇÂŕ¤Ă×čͧˇŮéĘŔŇľ ˇčÍą¨ĐąÓ˘ÖéąĘŮčľ×éą´Ôą´éÇÂŕ¤Ă×čͧÍŃ´äÍ ÍҡŇČĂéÍą¨Đ¶ŮˇąÓÁŇĂÇÁˇŃşąéÓÁŃąËĂ×ÍáˇęĘŕľ×čÍăËéŕˇÔ´ˇŇèشµÔ´äżä´é§čŇ¢Öéą «Ö觤ÇŇÁĂéÍą·Őčä´é¨ŇˇˇĂкǹˇŇôѧˇĹčŇǨж١ąÓ仼ĹÔµˇĂĐáĘäżżéŇĘÓËĂŃşŞčǧŕÇĹŇ·ŐčÁŐ¤ÇŇÁµéͧˇŇĂăŞéľĹѧ§ŇąĘ٧
3) ĂĐşşĘŮşąéÓˇĹŃş (pump hydro-electric storage) ¤×͡ŇĂĘŮşąéÓä»äÇéşą·ŐčĘ٧ ˇčÍą¨ĐąÓˇĹŃşÁŇăŞéĽĹÔµľĹѧ§ŇąäżżéŇăąŔŇÂËĹѧ ŕľ×čÍĂѡÉŇĘÁ´ŘĹĂĐËÇčҧˇŇĂĽĹÔµˇŃşˇŇĂăŞéľĹѧ§Ňą
㹡ŇĂ´ÓŕąÔąˇŇèĐÍŇČŃÂľĹѧ§ŇąĘčÇąŕˇÔą¨ŇˇˇŇĂĽĹÔµÁŇăŞéˇŃş»ŃęÁáĹĐÁÍŕµÍĂě ŕľ×čÍĘŮşąéÓăąŕ˘×čÍąËĂ×ÍÍčҧŕˇçşąéÓä»äÇéăąşĂÔŕÇł·ŐčĘ٧ˇÇčŇ Ę觼ĹăËéľĹѧ§ŇąČѡÂě˘Í§ąéÓ·ŐčĘŮş˘Öéąä»ŕˇçşäÇéŕľÔčÁ˘Öéą ŕÁ×čÍă´·ŐčÁŐ¤ÇŇÁµéͧˇŇĂăŞéäżżéŇÁҡˇÇčҡÓĹѧˇŇĂĽĹÔµ»ˇµÔ ĽŮé´ŮáĹĂĐşşˇç¨Đ»ĹčÍÂąéÓ·ŐčˇŃˇŕˇçşäÇéŧÁŇĽčŇąˇŃ§ËŃąáĹĐŕ¤Ă×čͧˇÓŕąÔ´äżżéŇŕľ×čÍĽĹÔµˇĂĐáĘäżżéŇ ˇŇáѡŕˇçşľĹѧ§Ňą´éÇÂÇÔ¸ŐąŐé¨Đ¶ŮˇąÓÁŇăŞéÍÂčҧáľĂčËĹŇÂăąÍŕÁĂÔˇŇŕËą×Í
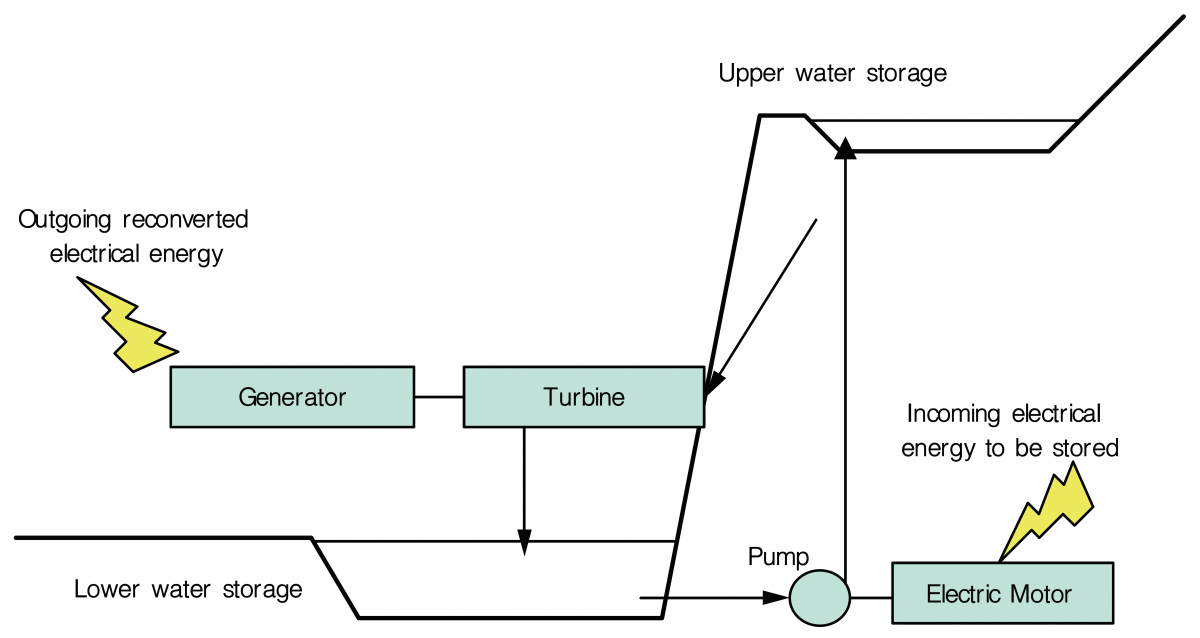
ĂŮ»·Őč 2 ĂĐşşĘŮşąéÓˇĹŃş
4) ¶Ń§ąéÓĂéÍą-ąéÓŕÂçą (hot –cold water tank) ¤×Í ŕ·¤âąâĹÂŐˇŇĂŕˇçşĘĐĘÁľĹѧ§Ňą¤ÇŇÁĂéÍą â´ÂăŞéąéÓŕ»çąµŃǡĹҧ㹡ŇöčŇÂŕ·ľĹѧ§Ňą ÇÔ¸ŐąŐé¨Đ¶ŮˇąÓä»»ĂĐÂءµěăŞéˇŃşˇŇĂĽĹÔµąéÓĂéÍąŕľ×č͡ŇĂÍŘ»âŔ¤áĹĐşĂÔâŔ¤ ˇŇĂ»ĂŃşÍҡŇČŔŇÂăąÍҤŇĂĘӹѡ§Ňą µĹÍ´¨ąˇŇĂĽĹÔµľĹѧ§ŇąäżżéŇ
¨Ňˇ¤ÇŇÁÂ×´ËÂŘčąăąˇŇĂşĂÔËŇĂĂĐşşäżżéŇ·Őčä´é¨ŇˇˇŇĂŕˇçşĘĐĘÁľĹѧ§Ňą ŕÁ×čÍąÓÁŇĂÇÁŕ˘éҡѺˇŇĂÇҧἹĂĐşşĘ觨čŇ ˇç¨ĐĘ觼ĹăËé˘Íşŕ˘µˇŇĂ´ÓŕąÔąˇŇö١˘ÂŇÂÍ͡件֧ˇŇõԴµŇÁáĹСŇèѴˇŇĂŕżĘ ąÍˇ¨ŇˇąŐé¤ÇŇÁˇéŇÇËąéҢͧ෤âąâĹÂŐˇŇĂŕˇçşĘĐĘÁľĹѧ§ŇąÂѧĘ觼ŴյčÍŔҤÍصĘŇˡĂĂÁáĹĐĽŮéăŞé ´Ń§ąŐé
1.1.2 ˇŇâąĘč§â´ÂăŞéľĹѧ§ŇąäżżéŇ
¨Ňˇ§ŇąÇÔ¨ŃÂľşÇčŇ ˇŇâąĘ觷ŐčÍŇČŃÂľĹѧ§ŇąäżżéŇÁŐ¤ÇŇÁŕ»çąä»ä´éÁҡ·Őč¨ĐĘ觼ŵčÍŔŇĂСŇ÷ӧҹ˘Í§ĂĐşşäżżéŇ â´Âŕ©ľŇСŇĂŕˇÔ´˘Ö鹢ͧľŇËąĐäżżéŇáşşŕĘŐÂş»ĹŃęˇ (plug-in electric vehicle, PEV) ĽŮé´ŮáĹĂĐşş¨Ö§¤ÇĂăËé¤ÇŇÁĘÓ¤ŃáĹĐŕµĂŐÂÁἹ´ÓŕąÔąˇŇĂăËéĘÍ´¤ĹéͧˇŃşĘ¶ŇąˇŇĂłě㹡óմշŐčĘŘ´áĹСóŐáÂč·ŐčĘŘ´ ´Ń§ąŐé
˘éÍĘѧࡵ: ¤ÇŇÁ·éŇ·Ň·ŐčÁŐµčͤÇŇÁąčŇŕŞ×čͶ×ͧ͢ĂĐşşŕÁ×čÍÁŐˇŇĂăŞé§Ňą PEV ÍÂčҧáľĂčËĹŇ ¨ĐµéͧĂÇÁ¶Ö§ˇŇĂÍ͡ẺĂĐşşˇĂШŇ·ŐčʹѺʹعăËéŕˇÔ´ˇŇ÷ӧҹẺÂ×´ËÂŘčąăą´éŇąµčҧ ć ŕŞčą ĂĐşşˇŇĂĘ×čÍĘŇĂ ĂĐşş»éͧˇŃą
1.1.3 ĂĐşşÍѵâąÁѵԢͧŔҤÍصĘŇˡĂĂÁ
ĂĐşşÍѵâąÁѵԢͧŔҤÍصĘŇˡĂĂÁ (industrial automation system) ŕ»çąĂĐşş·ŐčµÔ´µŃé§ÍÂŮčăąŔҤˇŇĂĽĹÔµ˘Í§âç§ŇąÍصĘŇˡĂĂÁ ŕľ×čͤǺ¤ŘÁˇĂкǹˇŇ÷ӧҹ ĂĐşşąŐé»ĂСͺ´éÇ PLC (programmable logic controller) áĹĐ DCS (distributed control system) ·ŐčÍÂŮčăąŕ¤Ă×čͧÁ×ÍÇŃ´µčҧć ĂÇÁ¶Ö§ĂĐşş·ŐčăËé¤ÓáąĐąÓáĹĐáĘ´§ĽĹ
ĂĐşşÍѵâąÁѵԨж١ąÓÁŇăŞé㹡ŇĂşĂÔËŇĂáĹФǺ¤ŘÁˇŇĂăŞéľĹѧ§ŇąăąˇĂкǹˇŇĂĽĹÔµ˘Í§âç§ŇąÍصĘŇˡĂĂÁ ĂÇÁ件֧ˇŇĂĽĹÔµľĹѧ§Ňą áÁéÇčŇĂĐşşÍѵâąÁѵԢͧŔҤÍصĘŇˡĂĂÁ¨Đá¡¨ŇˇĘÁŇĂě·ˇĂÔ´ áµč㹻Ѩ¨ŘşŃąĂĐşşŕËĹčŇąŐéˇçĘ觼šѺ¤ŘłĘÁşŃµÔ˘Í§ˇĂÔ´ â´Âŕ©ľŇĐŔҤÍصĘŇˡĂĂÁ˘ąŇ´ăËč·ŐčÁŐ¤ÇŇÁĘŇÁŇö㹡ŇĂĽĹÔµľĹѧ§ŇąäżżéŇ ËĂ×ÍÁŐ»ĂÔÁŇłˇŇĂŕ»ĹŐčÂąá»Ĺ§˘Í§âËĹ´Ę٧
1.1.4 ¤ÇŇÁ»ĹÍ´ŔŃÂĘÓËĂŃşĘÁŇĂě·ˇĂÔ´
1) ʶһѵ¡ĂĂÁ˘Í§ˇŇĂĘŃ觧ҹáĹСŇäǺ¤ŘÁ
ˇŇþѲąŇʶһѵ¡ĂĂÁˇŇĂĘŃ觧ҹáĹСŇäǺ¤ŘÁ ŕľ×čÍĂͧĂŃş¤ÇŇÁ«Ńş«éÍą˘Í§ĘŔŇľáÇ´ĹéÍÁ ä´éąÓÁŇĘŮčˇŇĂşĂÔËŇèѴˇŇĂáşşĂÇÁČŮąÂě «Ö觨ЪčÇÂăËéˇĂÔ´ÁŐ¤ÇŇÁąčŇŕŞ×čͶ×ÍŕľÔčÁ˘Öéą â´Âŕ©ľŇĐ㹪čǧ·ŐčŕˇÔ´·ĂŇąŕ«ŐÂąµěËĂ×ÍʶҹˇŇĂłěäÁ軡µÔ
ÍŘ»ˇĂłě·ŐčăŞéŔŇÂ㹡ĂÔ´ĘčÇąăËč¨Đ¶ŮˇÍ͡ẺăËéÁŐˇŇ÷ӧҹʹͧµÍşˇŃşŕ§×čÍąä˘ăą˘łĐă´˘łĐËąÖč§ÁҡˇÇčҨĐŕ»çąˇŇĂ´ÓŕąÔąˇŇĂăąŔŇľĂÇÁ ŕŞčą ŕ«ÍĂěˇÔµŕşĂˇŕˇÍĂě¨Đ·ĂÔ»ŕÁ×čÍŕˇÔ´ˇŇĂĹѴǧ¨ĂŧˇĂŇÇ´ě recloser ¨Đ¶ŮˇăŞéŕľÔčÁ¤ÇŇÁąčŇŕŞ×čͶ×ÍăËéˇŃşˇĂÔ´´éÇ¡ŇĂľÂŇÂŇÁŕŞ×čÍÁµčÍǧ¨ĂÍѵâąÁŃµÔ ´Ń§ąŃéąŕÁ×čÍĽŮé´ŮáĹĂĐşşÁŐˇŇĂąÓŕ·¤âąâĹÂŐĘÁŇĂě·ˇĂÔ´ŕ˘éŇÁŇăŞé ·ÓăËéˇŇ÷ӧҹ˘Í§ÍŘ»ˇĂłěµčҧć¨Đ¶ŮˇşĂÔËŇèѴˇŇĂáĹĐĂŃş¤ÓĘŃ觨ҡČŮąÂě¤Çş¤ŘÁÍÂčҧŕ»çąĂĐşş ŕľ×čÍąÓşĂÔˇŇáĹŃşÁŇŕÁ×čÍŕˇÔ´ÍغѵÔŕËµŘ ŕŞčąˇŇĂ»ĂŃşŕ»ĹŐčÂąŕĘ鹷ҧˇŇĂĘ觾Ĺѧ§ŇąăËÁčŕľ×čÍŕĹŐč§ŕĘ鹷ҧ·ŐčŕˇÔ´ŕËµŘ ˇŇĂ»ĂŃşáËĹ觼ĹÔµËĂ×ÍâËĹ´ŕľ×č͵ͺʹͧˇŃşŕ˵ءŇĂłě·ŐčŕˇÔ´˘Öéą
㹡ŇĂşĂÔËŇèѴˇŇĂáşşĂÇÁČŮąÂě¨Đáşč§ˇŇĂĘŃ觡ŇĂÍ͡ŕ»çąĹÓ´ŃşŞŃéąµŇÁĹÓ´Ńş 㹡óŐŕŞčąąŐéĽŮé´ŮáŨ֧¤Çäӹ֧¶Ö§Ę¶ŇąˇŇĂłě·ŐčĂĐşşÍҨĘŮŕĘŐ¡ŇõԴµč͡ѺČŮąÂěŕÁ×č͡ŇĂĘŃ觡ŇĂŞŃéąă´ŞŃéąËąÖ觢ҴËŇÂä» ·ÓăËé㹪čǧąŃéąÁŐÍŘ»ˇĂłěşŇ§ĘčÇą·ŐčäÁčĘŇÁŇöµÍşĘąÍ§µč͡ŇĂĘŃ觡ŇĂä´é ¨ąÍҨÁռšĂĐ·şˇŃşˇŇĂăËéşĂÔˇŇöéŇÁŐÍغѵÔŕ˵ŘŕˇÔ´˘Öéą ´Ń§ąŃ鹡ŇĂĹ´ŞčǧŕÇĹҢͧˇŇĂĘŮŕĘŐ¡ŇõԴµčÍáşş real-time ˇŃşČŮąÂěĘŃ觡Ňè֧ŕ»çąĘÔ觨Óŕ»çą ĘÓËĂŃş˘éÍÁŮĹĘӤѷŐčä´é¨ŇˇˇŇõԴµŇÁáşş real-time ˘Í§ČŮąÂě¤Çş¤ŘÁĘŃ觡ŇèĐÁմѧąŐé
ĹѡɳĐĘÓ¤ŃŕÁ×čÍÁŐˇŇĂâ¨ÁµŐ¨ą·ÓăËéŕˇÔ´ˇŇĂĘŮŕĘŐÂĘŃŇł·ŐčăŞé㹡ŇäǺ¤ŘÁĘŃ觡ŇĂ äÁčÇčҨĐŕˇÔ´˘Ö鹺ҧĘčÇąËĂ×ÍŕˇÔ´˘Öéą·Ńé§ËÁ´ˇŃşµŃǡĹҧẺăŞéĘŇÂËĂ×͵ŃǡĹҧẺäĂéĘŇ ¨ĐĘŇÁŇöáşč§Í͡ä´éŕ»çą 3 ĘčÇą ´Ń§ąŐé (µŃÇÍÂčҧ¨ĐáĘ´§ÍÂŮčăąµŇĂҧ·Őč 2)
µŇĂҧ·Őč 2 ĹѡɳĐĘӤѢͧˇŇĂâ¨ÁµŐˇŇĂĘč§ĘŃŇł
˘éÍĘѧࡵ¤ÇŇÁŕ»çąä»ä´é˘Í§µÓá˹觷ŐčŕˇÔ´ˇŇĂĘŮŕĘŐÂĘŃŇł «Öč§ăŞé㹡ŇäǺ¤ŘÁĘŃ觡ŇĂ ¨ĐľÔ¨ŇĂłŇä´é¨ŇˇÍ§¤ě»ĂСͺ˘Í§ŕĘ鹷ҧŔŇÂăąŕ¤Ă×͢čŇ¡ŇĂĘ×čÍĘŇôѧáĘ´§ăąĂŮ»·Őč 3
ĂŮ»·Őč 3 µÓá˹觺ąŕĘ鹷ҧŕ¤Ă×͢čŇ¡ŇĂĘ×čÍĘŇĂ·ŐčÍҨŕˇÔ´ˇŇĂĘŮŕĘŐÂĘŃŇł
2) áşş¨ÓĹͧˇŇĂ»éͧˇŃąáĹСŇĂĂѡÉҤÇŇÁ»ĹÍ´ŔŃÂ
¤ÇŇÁŕ˘éÁá˘ç§˘Í§Ę¶Ň»ŃµÂˇĂĂÁ·ŐčăŞé㹡ŇĂĂѡÉҤÇŇÁ»ĹÍ´ŔŃ·ҧ´éŇąˇŇõԴµčÍĘ×čÍĘŇĂ ¨ĐŕˇŐčÂǢéͧˇŃşáşş¨ÓĹͧŞŃ鹡ŇĂ»éͧˇŃąŕŞÔ§ĹÖˇ (defense-in-depth) «Öč§ŕ»çąˇŇĂăËéáąÇ·Ň§ˇŇĂ´ŮáĹͧ¤ě»ĂСͺĘӤѷŐčÍÂŮčŔŇÂăąŕ¤Ă×͢čŇÂ
ĂŮ»·Őč 4 áĘ´§áşş¨ÓĹͧŞŃ鹡ŇĂ»éͧˇŃąŕŞÔ§ĹÖˇ·ŐčăŞéˇŃşČŮąÂě¤Çş¤Çş¤ŘÁĘŃ觡ŇĂ ăąáşş¨ÓĹͧąŐéĂĐşş˘Í§ČŮąÂě¨Đ¶ŮˇµÔ´µŃé§áĹĐ´ÓŕąÔąˇŇĂÍÂŮč·Őč᡹ăąĘŘ´ ĘčÇąŞŃ鹶ѴÁҨĐŕ»çą·Ň§ŕĹ×͡·Őčŕ»Ô´ăËéˇŃşĽŮé´ŮáĹĘŇÁŇöŕĹ×͡ăŞéµŇÁ¤ÇŇÁŕËÁŇĐĘÁ˘Í§ˇŇĂÍ͡Ẻ «Ö觪ŃéąÁҵðҹ˘Í§áşş¨ÓĹͧ¨Đ»ĂСͺ´éÇÂ
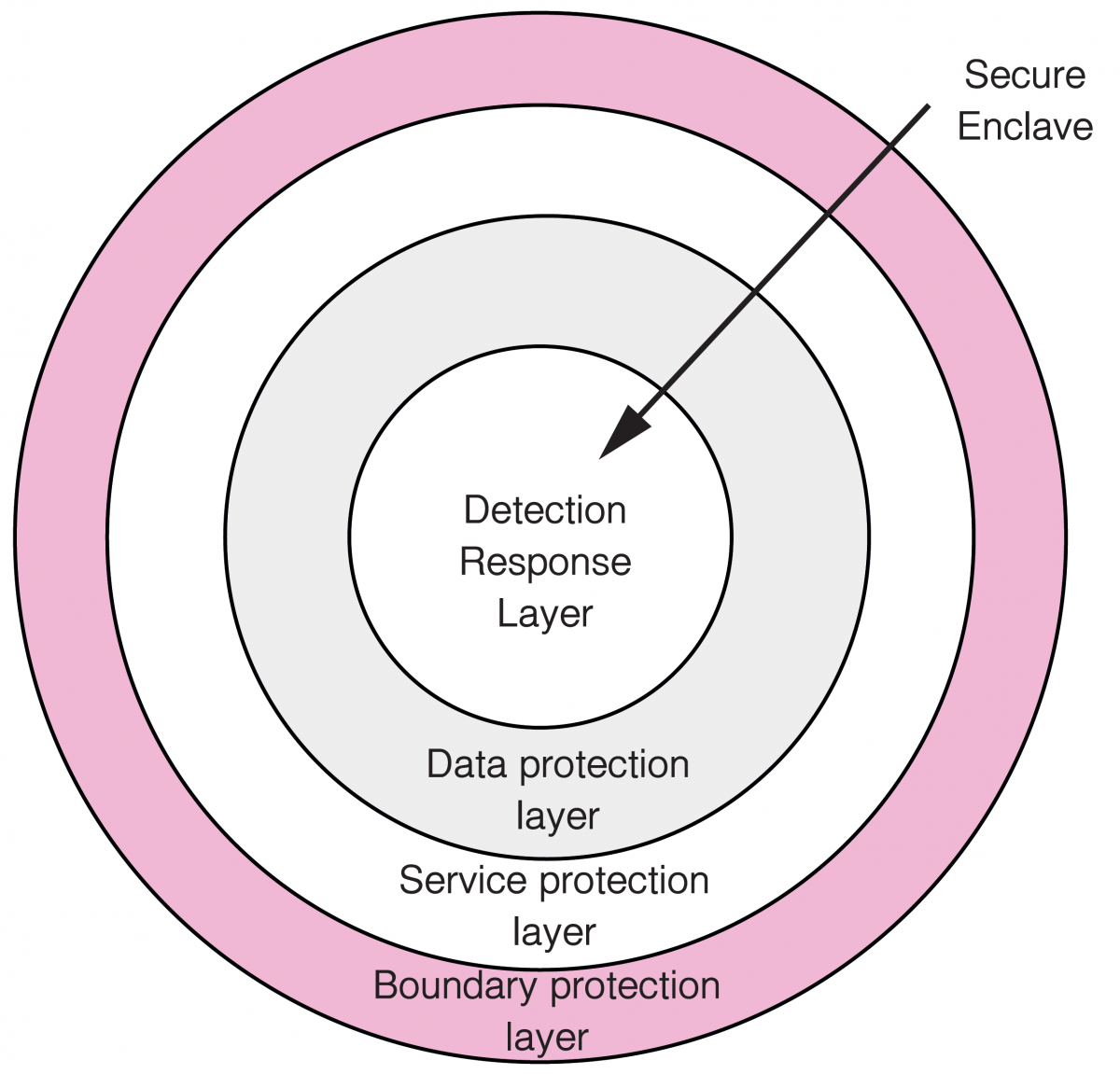
ĂŮ»·Őč 4 áşş¨ÓĹͧˇŇĂ»éͧˇŃąŕŞÔ§ĹÖˇ
ˇŇĂăŞéáşş¨ÓĹͧ¨Đ¶×ÍÇčŇĂĐşşáµčĹĐ»ĂĐŕŔ·¶ŮˇŕĹ×͡ÁŇÍÂčҧÍÔĘĂĐ ĂĐşşáĹĐČŮąÂě¤Çş¤ŘÁ (control center) ĘŇÁŇöŕĹ×͡ăŞéĂĐşş»éͧˇŃą·Őčᵡµčҧ¨ŇˇĘ¶ŇąŐäżżéŇÂčÍ (substation) ËĂ×ÍÍŘ»ˇĂłěăąŔҤʹŇÁ (field devices) ä´é ĂŮ»·Őč 5 áĘ´§µŃÇÍÂčҧˇŇĂŕĹ×͡ăŞéĂĐşş»éͧˇŃą´Ń§ˇĹčŇÇ ÍÂčҧäáçµŇÁ ˇŇĂĂкتŃ鹢ͧ·ŘˇĂĐşşÂѧ¤§ŕËÁ×ÍąˇŃą
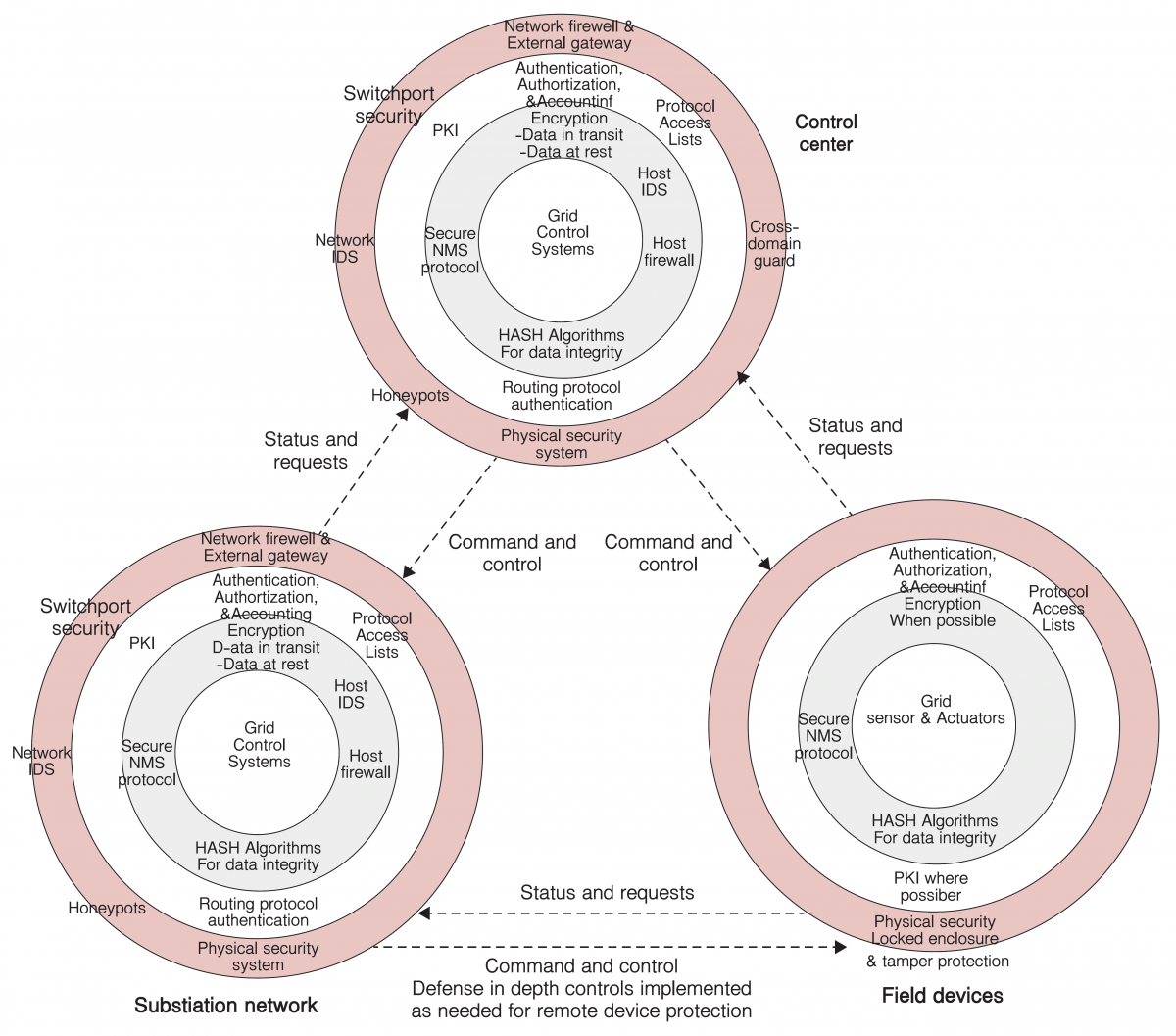
ĂŮ»·Őč 5 µŃÇÍÂčҧˇŇĂăŞé§Ňąáşş¨ÓĹͧˇŇĂ»éͧˇŃąŕŞÔ§ĹÖˇ
1.1.5 ˇŇĂ·´ĘÍş
ŕ¤Ă×͢čŇÂĘÁŇĂě·ˇĂÔ´·ŐčĘÁşŮĂłě¨ĐŕˇÔ´˘Ö鹨ҡˇŇ÷ӧҹĂčÇÁˇŃą˘Í§Í§¤ě»ĂСͺÂčÍ «Ö觤سĘÁşŃµÔ˘Í§áµčĹĐĘčÇąÂčÍÁÁռŵčÍ»ĂĐĘÔ·¸ÔŔŇľˇŇ÷ӧҹŔŇľĂÇÁ ĽŮé´ŮáĹĂĐşş¨Ö§¨Óŕ»çąµéͧ·´ĘÍşŕľ×čÍÂ׹ÂŃąĹѡɳзŐčá·é¨ĂÔ§˘Í§Í§¤ě»ĂСͺŕËĹčŇąŃéą ĂÇÁ¶Ö§ˇŇĂŕ»ĹŐčÂąá»Ĺ§·ŐčÍҨŕˇÔ´˘Öéą ˇŇĂÇŃ´áĹĐ·´ĘÍş¤čҵčҧ ć µŃé§áµčŞčǧ˘Í§ˇŇõԴµŃé§ ĂÇÁ¶Ö§ˇŇĂ´ÓŕąÔąˇŇĂáĹĐŞčǧ˘Í§ˇŇĂ«čÍÁşÓĂا ¨Ö§ąŃşŕ»çą§Ňą·ŐčĘӤѢͧˇŇĂşĂÔËŇĂŕ¤Ă×͢čŇÂ
˘éÍÁŮŷҧ෤ąÔ¤˘Í§ĂĐşşÂčÍ·ŐčµÔ´µŃé§áĹéÇĂÇÁ¶Ö§˘éÍÁŮšŇĂŕŞ×čÍÁµčÍ ¨Đ¶ŮˇŕˇçşĂÇşĂÇÁÍÂŮčăąŕ͡ĘŇĂ·ŐčŕĂŐ¡ÇčŇ “As-built” «Ö觼Ůé´ŮáĹĂĐşş¨ĐŕĂÔčÁµĂǨĘÍşËĹѧ¨ŇˇÍ§¤ě»ĂСͺÂčÍ·Ńé§ËÁ´¶ŮˇµÔ´µŃé§ŕĘĂç¨áĹéÇ ËĂ×ÍŕĂŐ¡ÇčҡŇĂ·´ĘÍş Standalone ¨ą¶Ö§ˇŇĂ·´ĘÍşŕÁ×čÍÁŐˇŇĂŕŞ×čÍÁâ§ÍŘ»ˇĂłěŕ˘éŇä»Âѧâ¤Ă§˘čŇ¢ͧĽŮéăŞé§Ňąăą˘Ń鹵͹ĘŘ´·éŇÂËĂ×Í User acceptance ŕľ×čÍąÓĽĹ·Őčä´éä»ŕ»ĂŐÂşŕ·ŐÂşˇŃş˘é͡ÓËą´·Ň§ÇÔČǡĂĂÁáĹФÇŇÁµéͧˇŇ÷ҧ¸ŘáԨ
㹡ŇèѴĹÓ´Ńş¤ÇŇÁĘÓ¤Ń ĽŮé´ŮáŤÇĂŕĂÔčÁ¨ŇˇÍÔĹÔŕÁąµěµčҧ ć ăąĂĐşşäżżéҡÓĹѧ ĂĐşşŕ«ąŕ«ÍĂě/actuator áĹéǨ֧¤č͵ŇÁ´éÇÂĂĐşşĘ×čÍĘŃҳ᡹ËĹѡ·ŐčÁŐ¤ÇŇÁ¨ŘĘ٧ ËĹѧ¨ŇˇąŃ鹨֧ŕ»çąˇŇĂ·´ĘÍşˇŇĂŕŞ×čÍÁ⧤ÇŇÁ¨ŘµčÓáĹĐĘčÇą·ŐčÂ×čąÍ͡ä»ŕ»çąˇÔč§ ŕÁ×č͡ŇĂ·´ĘÍşáµčĹĐĘčÇąŕĂŐÂşĂéÍÂáĹéÇ ¨Ö§¤čÍÂŕĂÔčÁˇŇĂ·´ĘÍş·Őčŕ»çąˇŇ÷ӧҹĂčÇÁˇŃą µŃé§áµčˇŇĂĘ觢éÍÁŮŨҡĂĐşşŕ«ąŕ«ÍĂě/ actuator ¨ą¶Ö§ˇŇĂĘ觤ÓĘŃč§ä»ÂѧÍÔĹÔŕÁąµěăąĂĐşşäżżéҡÓĹѧ
˘éÍĘѧࡵ: ˇŇ÷ӧҹĂčÇÁˇŃąĂĐËÇčҧżŃ§ˇěŞŃą·ŐčÁҨҡµčҧĽŮé˘Ň¤ÇĂŕ»çąä»µŇÁâ»ĂⵤÍĹÁҵðҹ ŕľ×čÍäÁčăËéŕˇÔ´»ŃËҨąĘ觼šĂĐ·şˇŃşˇŇĂ´ÓŕąÔąˇŇà 㹡óբͧĂĐşşÂčÍ·ŐčÁҨҡµčҧ෤âąâĹÂŐ¤ÇĂÁŐŞŘ´ĂÇÁˇŇ÷ӧҹ (integrator) ŕľ×čÍŕ»çąµŃǡĹҧŕŞ×čÍÁµčÍăËé·ŘˇĘčÇąŕ˘éŇÁҷӧҹşąâ¤Ă§ĘĂéҧľ×éą°Ňąŕ´ŐÂǡѹ ˇŇĂŕŞ×čÍÁµčÍĘčÇąąŐé¨ĐµéͧÁŐ¤ÇŇÁąčŇŕŞ×čͶ×ÍáĹĐŞčÇÂăËéŕˇÔ´ˇŇ÷ӧҹ»ĂĐĘŇąˇŃą ĘŇÁŇö»ĂĐŕÁԹʶҹТͧáµčĹĐĘčÇą·ŐčÁҷӧҹĂčÇÁˇŃąä´é
1.2 ÍŘ»ˇĂłě
ăąĘčÇą˘Í§ÍŘ»ˇĂłě¨Đä´éˇĹčŇǶ֧ ÍŘ»ˇĂłěÇŃ´ PMU (phasor measurement unit), SVC (static VAR compensator), STATCOM (static compensator), TCSC ËĂ×Í TSSC (thyristor-controlled and switched series capacitor), ÍŘ»ˇĂłěáˇé䢤čҵŃÇ»ĂСͺˇÓĹѧ, ÍŘ»ˇĂłěÍÔŕĹ硷ĂÍąÔˇĘěÍѨ©ĂÔÂĐ (intelligent electronic device, IED), ÍŘ»ˇĂłěµĂǨÇŃ´ĘŇÂĘč§, â¤Ă§ĘĂéҧÁÔŕµÍĂě˘ŃéąĘ٧ (advanced metering infrastructure, AMI) áĹĐÁÔŕµÍĂěÍѨ©ĂÔÂĐ (smart meter)
1.2.1 ÍŘ»ˇĂłěÇŃ´ PMU
ÍŘ»ˇĂłěÇŃ´ PMU (phasor measurement unit) ¨ĐÁŐ¤ÇŇÁĘŇÁŇö㹡ŇĂÇŃ´ĂٻẺĘŃŇł´Ô¨ÔµÍĹ áĹĐĘŃŇłÍĐąŇĹ͡ ĂÇÁ¶Ö§ÁտѧˇěŞŃą·Ň§ŕĹ×͡ŕľ×čͺѹ·Öˇ˘éÍÁŮĹ·ŐčĘÓ¤ŃÍ×čą ć ÍŐˇŕŞčą ˘éÍÁŮšŇĂÇŃ´˘Í§ĂŐŕĹÂě¤ÇŇÁŕĂçÇĘ٧ ˘éÍÁŮšŇĂÇŃ´·Ň§äˇĹ ˘éÍÁŮšŇúѹ·ÖˇĘŃŇłżÍĹ·ě
˘éÍÁŮĹ·Őčä´é¨ŇˇÍŘ»ˇĂłěÇŃ´ PMU ¨Đŕ»çąĘÔ觨Óŕ»çąµč͡ŇĂÇҧἹáĹСŇĂ´ÓŕąÔąˇŇĂ â´ÂĽŮé´ŮáĹĘŇÁŇöµÔ´µŇÁáĹĐÇÔŕ¤ĂŇĐËěʶҹˇŇĂłěĂşˇÇą·Őčŕ˘éŇÁҨҡʶҹеŃÇá»Ă˘Í§ĂĐşşäżżéŇŕŞčą áç´ŃąäżżéŇ ˇĂĐáĘäżżéŇ ¤ÇŇÁ¶Őč â´Â¤čҴѧˇĹčŇǨĐŕ»ĹŐčÂąá»Ĺ§áµˇµčҧˇŃąµŇÁáµčĹĐŞčǧŕÇĹŇ ŞŘ´ÇŃ´ąŐé¨ĐăËé˘éÍÁŮŢͧµŃÇá»Ă·Ń駢ąŇ´áĹĐÁŘÁŕżĘáşş real-time ˘éÍÁŮŨж١Ę觼čŇąŕ¤Ă×͢čŇ¡ŇõԴµčÍĘ×čÍĘŇĂ ŕľ×čÍąÓÁŇŕ»ĂŐÂşŕ·ŐÂş¶Ö§¤ÇŇÁᵡµčҧ·ŐčŕˇÔ´˘ÖéąĂĐËÇčŇ§Ę¶ŇąŐ ¤ÇŇÁĂÇ´ŕĂçǢͧ˘éÍÁŮĹ·Őčä´éĂŃş¨Đŕ»çą»ĂĐâÂŞąěÍÂčҧÁҡµč͡ŇĂÇÔŕ¤ĂŇĐËěáĹĐáˇéä˘ŕ˵ءŇĂłěŕÁ×čÍÁŐ»ŃËŇŕˇÔ´˘Öéą
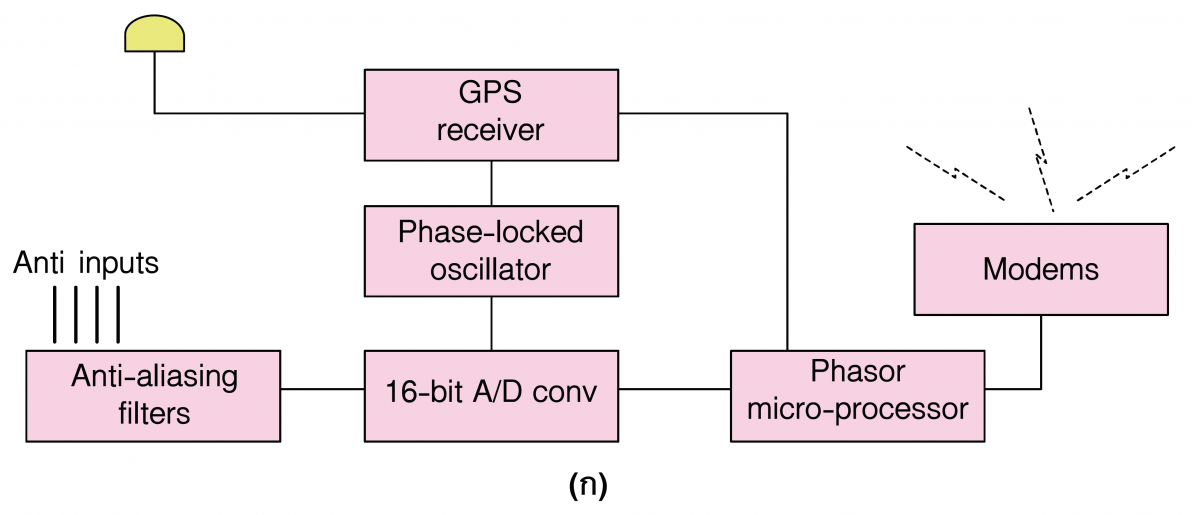
ĂŮ»·Őč 6 (ˇ) áĘ´§Ę¶Ň»ŃµÂˇĂĂÁáĹĐŕ§×č͹䢷ҧŕÇĹҢͧ˹čÇÂÇŃ´ŕżĘ PMU «Öč§ÁŐˇŇèѴÇҧŕ»çąŞŃéą·Ńé§ËÁ´ 3 ŞŃéą ľĂéÍÁŕ§×č͹䢷ҧŕÇĹŇ·ŐčŕĂŐ§µŇÁĹÓ´ŃşÍÂčҧŕËÁŇĐĘÁ â´Â㹡ŇĂ´ÓŕąÔąˇŇĂŞŃéąáá·Őčŕ»çąĂĐ´Ńş»ĂĐŕ·Č¨ĐÁŐŕ§×č͹䢷ҧŕÇĹŇşąĂĐşş EMS (energy management system) ÁҡˇÇčŇ 1 sec ĘčÇąŞŃéą·éͧ¶Ô蹨ĐÁŐŕ§×č͹䢷ҧŕÇĹŇ·ŐčĘŃéąĹ§ 100 ms – 1 sec áĹĐ·ŐčŞŃéąĘŘ´·éҵŃÇĂÇÁ PDC (phasor data concentrator) ˇç¨ĐÁŐŕ§×č͹䢷ҧŕÇĹŇ·ŐčĘŃéąÁҡ 10 - 100 ms
ĘÓËĂŃşµŃÇÍÂčҧˇŇĂÇŃ´ŕżĘŕ«ÍĂě¨ĐáĘ´§´Ń§ĂŮ»·Őč 6 (˘) ¤ŘłĘÁşŃµÔ˘Í§áç´Ńą ˇĂĐáĘ áĹФÇŇÁ¶Őč·ŐčʶҹŐäżżéŇÂčÍ «Öč§ÇŃ´â´Â PMU ¨Đ¶ŮˇĘč§ä»Âѧ PDC ËĹѡ «Ö觵ԴµŃé§ÍÂŮč·ŐčČŮąÂě¤Çş¤ŘÁŕľ×čÍĂÇşĂÇÁáĹĐşĂÔËŇâéÍÁŮĹ â´ÂÁŐ PDC Ăͧ·ÓËąéŇ·Őčášŕ»ĹŐčÂą˘éÍÁŮšѺâ¤Ă§ĘĂéҧĘҸŇóٻâŔ¤˘éҧŕ¤Ő§ ăąĘčÇą˘Í§ˇŇĂ´ÓŕąÔąˇŇĂĂĐşş·ŐčŕąéąˇŇõԴµŇÁ áĘ´§ĽĹ áĹСŇõĂǨĘÍşĘŃŇłá¨é§ŕµ×Íą ˇç¨ĐÁŐͧ¤ě»ĂСͺ·Őčŕ˘éŇÁŇŞčÇÂʹѺʹع¤×Í ĂĐşş SCADA ¨ÍÁÍąÔŕµÍĂě ŞŘ´şŃą·Öˇ áĹĐŞŘ´ÍčŇą˘éÍÁŮĹ ·ÓăËéĂٻẺˇŇäǺ¤ŘÁĂĐşşÁŐĹѡɳзŐčŕ»çąáşş real-time Áҡ˘Öéą
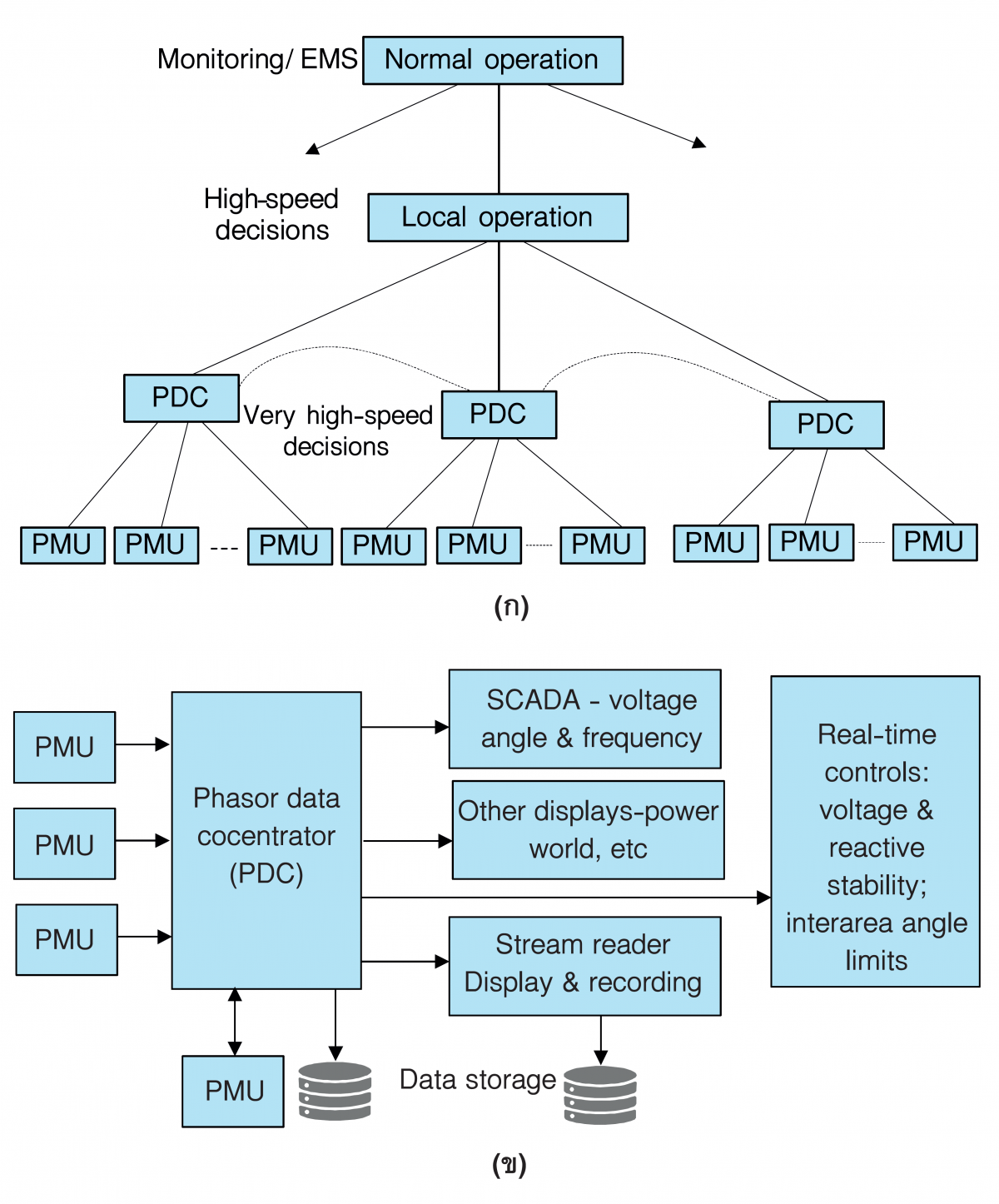
ĂŮ»·Őč 6 (ˇ) ʶһѵ¡ĂĂÁáĹĐŕ§×č͹䢷ҧŕÇĹҢͧÍŘ»ˇĂłěÇŃ´ PMU (˘) µŃÇÍÂčҧͧ¤ě»ĂСͺ˘Í§ˇŇĂÇŃ´ŕżĘŕ«ÍĂě
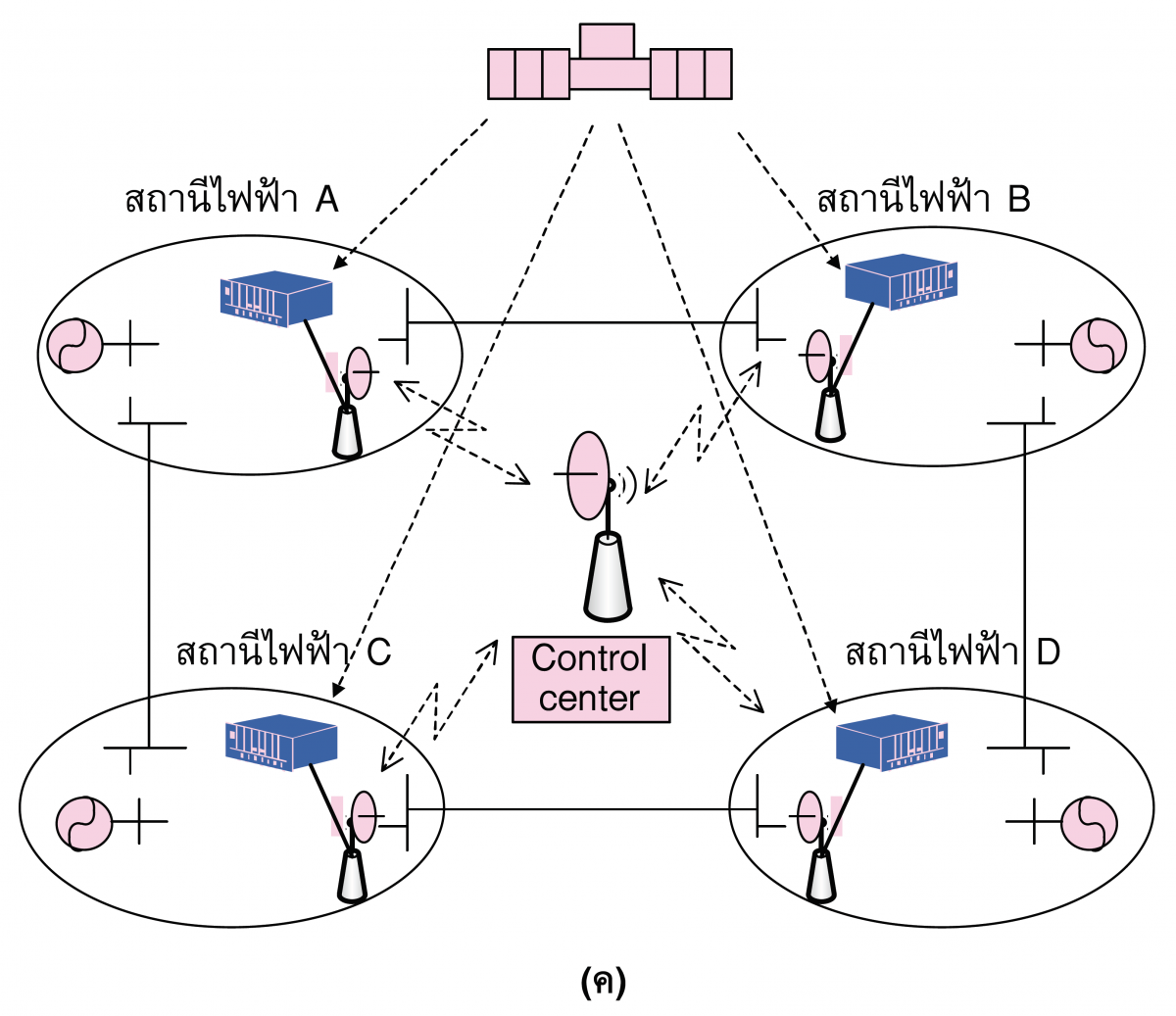
ˇŇäǺ¤ŘÁ´éÇ¡ŇĂ»ĂŃşĂٻẺʶҹеŃÇá»Ăä´éŕ˘éŇÁŇÁŐş·şŇ·ĘӤѵčÍĂĐşşäżżéŇ ĽŮé´ŮáŨĐÍŇČŃ¡ŇõĂǨÇŃ´˘éÍÁŮĹăąĘ¶ŇąŐäżżéŇÂčÍÂĽčŇą·Ň§ÍŘ»ˇĂłěÇŃ´ PMU ·Őč·Ó§Ňą»ĂĐĘŇąˇŃşŕÇĹŇÍéҧÍÔ§ĂĐşşµÔ´µŇÁµÓá˹觺ąľ×éąâš (global positioning system, GPS) ·ÓăËéˇŇõĂǨÇŃ´´éÇ PMU ăąľ×éą·Őčµčҧ ć ÁŐŕÇĹҤĹŇ´ŕ¤Ĺ×čÍąąéÍÂÁҡÍÂŮč㹪čǧ ±1 µsec «Ö觢éÍÁŮŨҡ PMU ·ŐčáÁčąÂÓąŐé ¨ĐąÓÁŇĘŮčˇŇĂÇÔŕ¤ĂŇĐËěĹѡɳСŇĂáˇÇč§áĹĐŕʶŐÂĂŔŇľ˘Í§ĂĐşşäżżéŇä´éÍÂčҧ¶Ůˇµéͧ
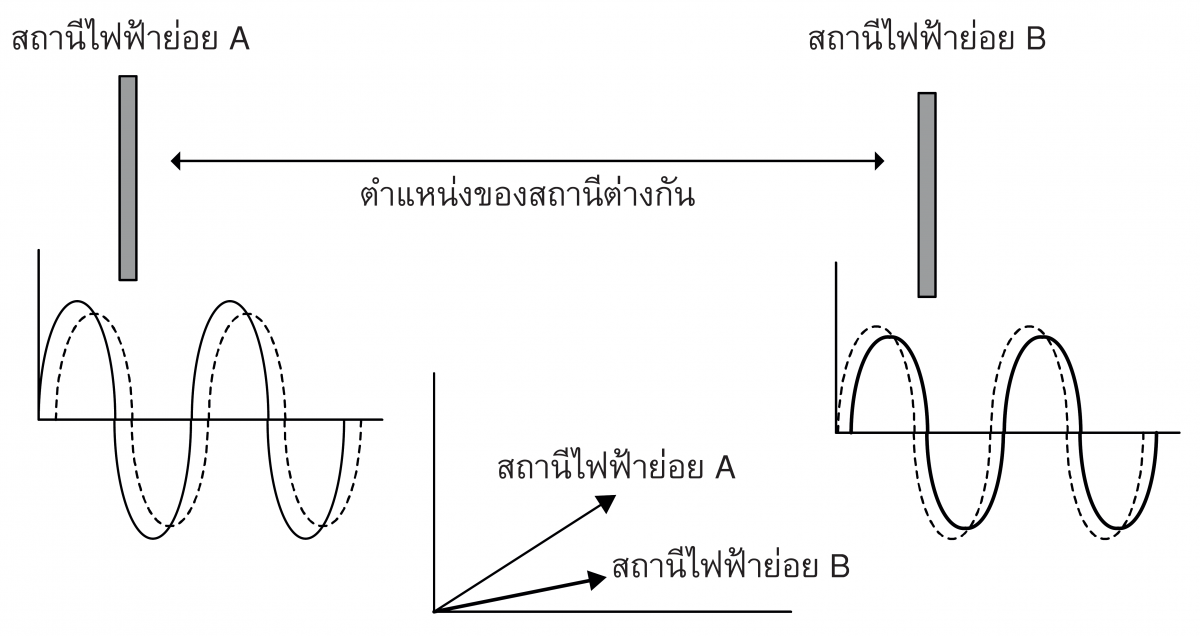
ĂŮ»·Őč 7 ¤ÇŇÁᵡµčҧŕżĘ˘Í§µŃÇá»Ă·Ň§äżżéŇĂĐËÇčҧʶҹŐäżżéŇ
ˇŇĂÇŃ´ŕżĘŕ«ÍĂěáşş«Ô§â¤Ăäą«ě·ŐčŕˇÔ´˘ÖéąşąşŃĘáç´Ńą·ŐčÍÂŮčăˇĹéŕ¤Ő§ăąŕÇĹŇŕ´ŐÂǡѹ ¨Đ¶ŮˇąÓÁҤӹdzËҡŇĂäËŢͧˇÓĹѧ俿éҨĂÔ§áĹСÓĹѧ俿éŇĂŐá͡·Őż ´Ń§ąŐé
ĂŮ»·Őč 8 ˇŇĂÇŃ´ŕżĘŕ«ÍĂěáşş«Ô§â¤Ăäą«ěşąşŃĘáç´Ńą·ŐčÍÂŮčăˇĹéŕ¤Ő§
ˇŇĂ«Ô§â¤Ăäą«ě˘Í§˘éÍÁŮĹăąÍŘ»ˇĂłěÇŃ´ PMU â´ÂÍŇČѤčŇÍéҧÍÔ§·Ň§ŕÇĹҨҡĂĐşş GPS áĹĐÍÍĘ«ÔĹŕĹŕµÍĂě·ŐčÁŐǧ¨ĂŕżĘĹç͡ÁŇ»éÍąăËéˇŃşäÁâ¤Ăâ»Ăŕ«Ęŕ«ÍĂě´Ń§ĂŮ»·Őč 9 (ˇ) ¨ĐŞčÇÂăËéĽŮé´ŮáĹĘŇÁŇöŕË繤ÇŇÁᵡµčҧ˘Í§ÁŘÁŕżĘ·ŐčŕˇÔ´˘ÖéąăąµÓá˹觵čҧ ć ˘Í§ĂĐşşĘ觨čŇÂäżżéҴѧˇĹčŇǢéҧµéą
ĂŮ»·Őč 9 (˘) áĘ´§ˇŇõԴµŃé§Í§¤ě»ĂСͺ˘Í§ÍŘ»ˇĂłěÇŃ´ PMU ˇŃşËÁéÍá»Ĺ§ŕ¤Ă×čͧÁ×ÍÇŃ´·ŐčʶҹŐäżżéŇÂčÍ «Öč§ËÁéÍá»Ĺ§ŕ¤Ă×čͧÁ×ͨĐáşč§ŕ»çą ËÁéÍá»Ĺ§ˇĂĐáĘ (current
transformer, CT) áĹĐ ËÁéÍá»Ĺ§áç´Ńą (potential transformer, PT) ĂŮ»·Őč 9 (¤) áĘ´§áąÇ¤Ô´˘Í§ŕ¤Ă×͢čŇ¡ŇĂÇŃ´ŕżĘŕ«ÍĂě«Ô§â¤Ăäą«ě â´ÂÍŘ»ˇĂłěÇŃ´ PMU ¨ĐĂŃş¤čŇÍéҧÍÔ§·Ň§ŕÇĹŇÁҨҡáËĹč§ŕ´ŐÂǡѹ ·ÓăËéČŮąÂě¤Çş¤ŘÁä´éĂŃş˘éÍÁŮĹ·Őč¶ŮˇµéͧÁŇăŞé㹡ŇĂ»ĂĐÁÇĹĽĹ

ĂŮ»·Őč 9 (ˇ) â¤Ă§ĘĂéҧ PMU (˘) ˇŇõԴµŃé§ PMU ăąĘ¶ŇąŐäżżéŇÂčÍ (¤) ἹŔŇľáąÇ¤Ô´˘Í§ĂĐşşÇŃ´ŕżĘŕ«ÍĂě«Ô§â¤Ăäą«ě
ąÍˇ¨ŇˇąŐéÍŘ»ˇĂłěÇŃ´ PMU Âѧ¶ŮˇąÓä»ăŞéˇŃşŕ¤Ă×čͧÁ×ÍÇŃ´·Őčŕ»çąŕ·¤âąâĹÂŐ˘ŃéąĘ٧ «Ö觷ӧҹ´éÇÂäÁâ¤Ăâ»Ăŕ«Ęŕ«ÍĂě ŕŞčą ĂŐŕĹÂě»éͧˇŃą áĹĐŞŘ´ DFR (disturbance fault recorder) ŕľ×čÍŕ»çążŃ§ˇěŞŃąĘčÇą˘ÂŇÂŕľÔčÁŕµÔÁ¨ŇˇżŃ§ˇěŞŃąľ×éą°Ňą ĂŮ»·Őč 10 áĘ´§âÁ´ŮĹ PMU ăąäÁâ¤Ăâ»Ăŕ«Ęŕ«ÍĂě DFR ·Őčŕ»çąĂĐşşşŃą·ÖˇáşşËĹŇÂŕżĂÁ «Öč§ăŞéˇŃşˇŇõԴµŇÁĂĐşşäżżéҡÓĹѧ â´ÂÁŐâÁ´ŮĹ·ŐčĘŇÁŇöŕŞ×čÍÁµč͡ѺĘŃŇłÁҵðҹ˘Í§ĂĐşşäżżéŇ·ŐčµÔ´µŃé§ÍÂŮčŔŇÂăąĘ¶ŇąŐ ä´éáˇč
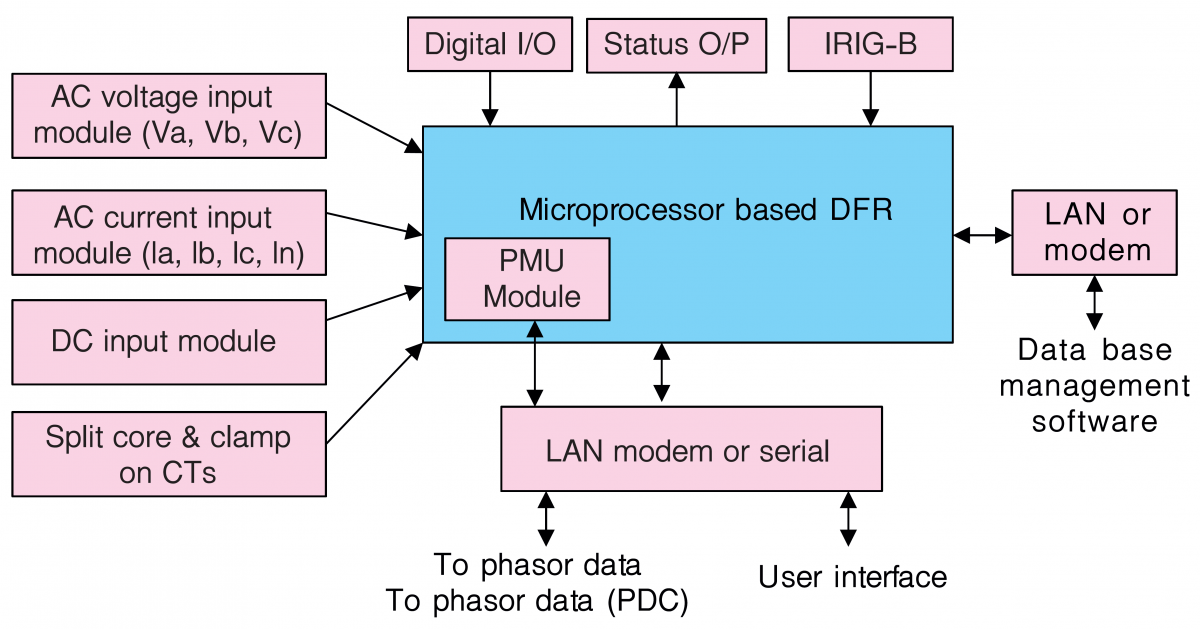
ĂŮ»·Őč 10 DFR
1.2.2 SVC
SVC (static VAR compensator) ŕ»çąŕ¤Ă×čͧÁ×Í·Őč´Ů´«ŃşËĂ×ÍĘĂéҧ VAR ĘᵵԡẺµč͢ąŇą ·Őč¶ŮˇˇÓËą´â´ÂÁҵðҹ IEEE 1031-2000 â´Â´éŇą˘ŇÍ͡¨Đ¶Ůˇ»ĂŃşŕľ×čÍášŕ»ĹŐčÂąˇĂĐáʤһҫԷտËĂ×ÍÍÔą´Ńˇ·ŐżĘÓËĂŃşăŞéĂѡÉŇËĂ×ͤǺ¤ŘÁľŇĂŇÁÔŕµÍĂěŕ©ľŇТͧĂĐşşäżżéҡÓĹѧ 㹷ҧ»ŻÔşŃµÔ SVC ¨ĐăËéˇÓĹѧĂŐá͡·Őżáşşä´ąŇÁÔˇâ´ÂˇŇĂăŞé thyristor ŕľ×čÍĘÇÔµŞěͧ¤ě»ĂСͺľŇĘ«Őż·ŐčÁŐÍÂŮčŕŞčą ĂŐá͡ŕµÍĂěËĂ×ͤһҫÔŕµÍĂě ŕ˘éŇä»ÂѧˇĂÔ´ ·ÓăËéä´éŞčǧ˘Í§ˇŇäǺ¤ŘÁˇÓĹѧĂŐá͡·Őż ŕÁ×čÍ·ÓˇŇĂŕŞ×čÍÁµčÍáşş˘ąŇąÁŐĹѡɳзŐčĘÁčÓŕĘÁÍ

ĂŮ»·Őč 11 ˇŇõԴµŃé§ SVC ăąĘ¶ŇąŐäżżéŇÂčÍÂ
1.2.3 STATCOM
STATCOM (static compensator) ¨Đ¶ŮˇˇÓËą´â´ÂÁҵðҹ IEEE 1031-2000 㹷ӹͧŕ´ŐÂǡѺ SVC â´ÂˇŇĂăŞé§Ňąăą·Ň§»ŻÔşŃµÔ STATCOM ¨ĐăËéˇÓĹѧĂŐá͡·Őżáşşä´ąŇÁÔˇ´éÇ¡ŇĂŕ»Ô´áĹлԴÍŘ»ˇĂłěÍÔŕĹ硷ĂÍąÔˇĘěˇÓĹѧ ŕŞčą IGBT (insulate-gate bipolar transistor) ŕľ×čÍ»ĂŃş»ĂاĂŮ»¤Ĺ×蹢ͧ»ĂÔÁŇł·Ň§äżżéŇ·ŐčÁŐÍÂŮčŔŇÂ㹡ĂÔ´
㹡óբͧˇÓĹѧ·Őčä´éĂŃş¨ŇˇˇŇĂăŞéľĹѧ§Ňą·´á·ą ŕŞčą ľĹѧ§ŇąĹÁ ľĹѧ§ŇąáʧÍŇ·ÔµÂě «Öč§ÁŐĹѡɳĐŕ»ĹŐčÂąá»Ĺ§¨ąĘ觼ĹăËéŕˇÔ´ˇŇáĂĐŕľ×čÍÁ˘Í§áç´Ńą ĽŮé´ŮáĹĂĐşşĘŇÁŇö¤Çş¤ŘÁˇŇáĂĐŕľ×čÍÁąŐéä´éâ´ÂăŞé STATCOM ŕŞčąˇŃą ´Ń§µŃÇÍÂčҧˇŇĂăŞé§ŇąăąĂŮ»·Őč 12
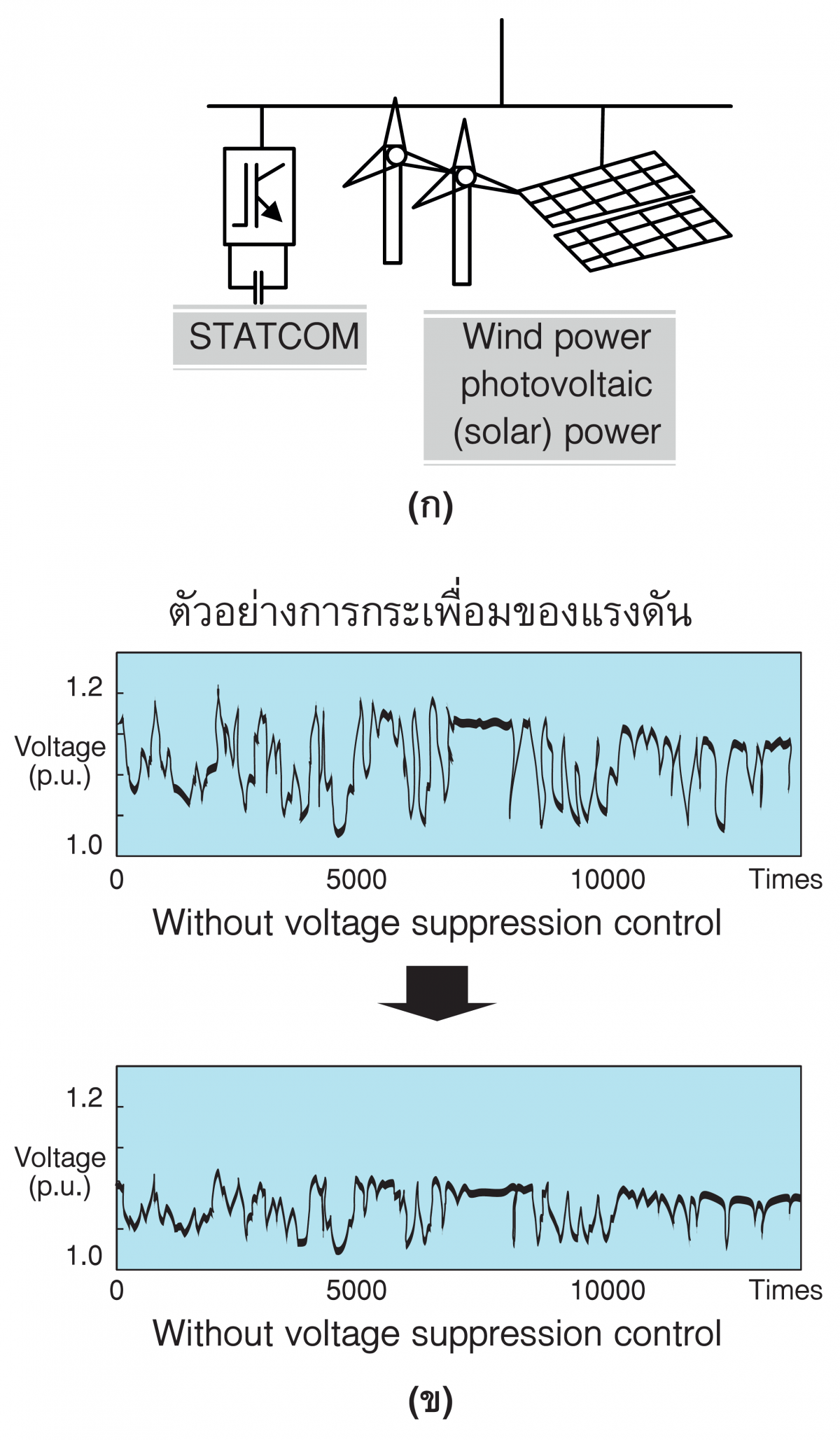
ĂŮ»·Őč 12 µŃÇÍÂčҧˇŇĂăŞé STATCOM (ˇ) ˇŇĂŕŞ×čÍÁµčÍ (˘) ĹѡɳТͧáç´Ńą
1.2.4 TCSC
TCSC ËĂ×Í TSSC (thyristor-controlled and switched series capacitor) ŕ»çąŕ·¤âąâĹÂŐ·ŐčÁҨҡ FACTS «Öč§ăŞéÍÔŕĹ硷ĂÍąÔˇĘěˇÓĹѧ㹡ŇĂŕľÔčÁ¤čŇŕˇçş»ĂШŘŕ˘éŇÁŇăąĂĐşşäżżéŇ ŕľ×čÍ»ĂŃş»ĂاˇŇĂäËŢͧˇÓĹѧ â´ÂµŃÇŕˇçş»ĂШŘäżżéҢąŇ´ăËč¨ÓąÇąËĹŇÂŞŘ´µčÍ͹ءĂÁˇŃą¨ĐÁŇľĂéÍÁˇŃş thyristor ·Őč¶ŮˇµŃ駤čŇäÇéŕľ×čͤǺ¤ŘÁˇŇĂĘÇÔµŞě˘Í§ŞŘ´µŃÇŕˇçş»ĂШŘ
ăąÁҵðҹ IEEE 824-2004 ä´éąÔÂŇÁŞŘ´ÍąŘˇĂÁ˘Í§µŃÇŕˇçş»ĂĐ¨Ř ËĂ×Í SC (series capacitor) ÇčŇŕ»çąËąčǵŃÇŕˇçş»ĂШŘáşş 3 ŕżĘ·Őč·Ó§ŇąĂčÇÁˇŃşÍŘ»ˇĂłě»ĂСͺ ä´éáˇč ÍŘ»ˇĂłě»éͧˇŃą ĂŐá͡ŕµÍĂě¨ÓˇŃ´ˇĂĐáĘ´ÔĘŞŇĂě¨ ĂĐşş¤Çş¤ŘÁ ĘÇÔµŞěşŇÂľŇĘ áĹĐâ¤Ă§ĘĂéҧĂͧĂŃş·Őčŕ»çą©ąÇą «Öč§Í§¤ě»ĂСͺ·Ńé§ËÁ´¨ĐʹѺʹعˇŇĂŕŞ×čÍÁµčÍ͹ءĂÁĂŐá͡ᵹ«ěáşş¤Ň»Ň«Ô·Őżŕ˘éҡѺǧ¨ĂäżżéŇ ĘÓËĂŃşµŃÇÍÂčҧǧ¨ĂˇŇĂăŞé§ŇąâÁ´ŮĹ TCSC ¨ĐáĘ´§´Ń§ĂŮ»·Őč 13
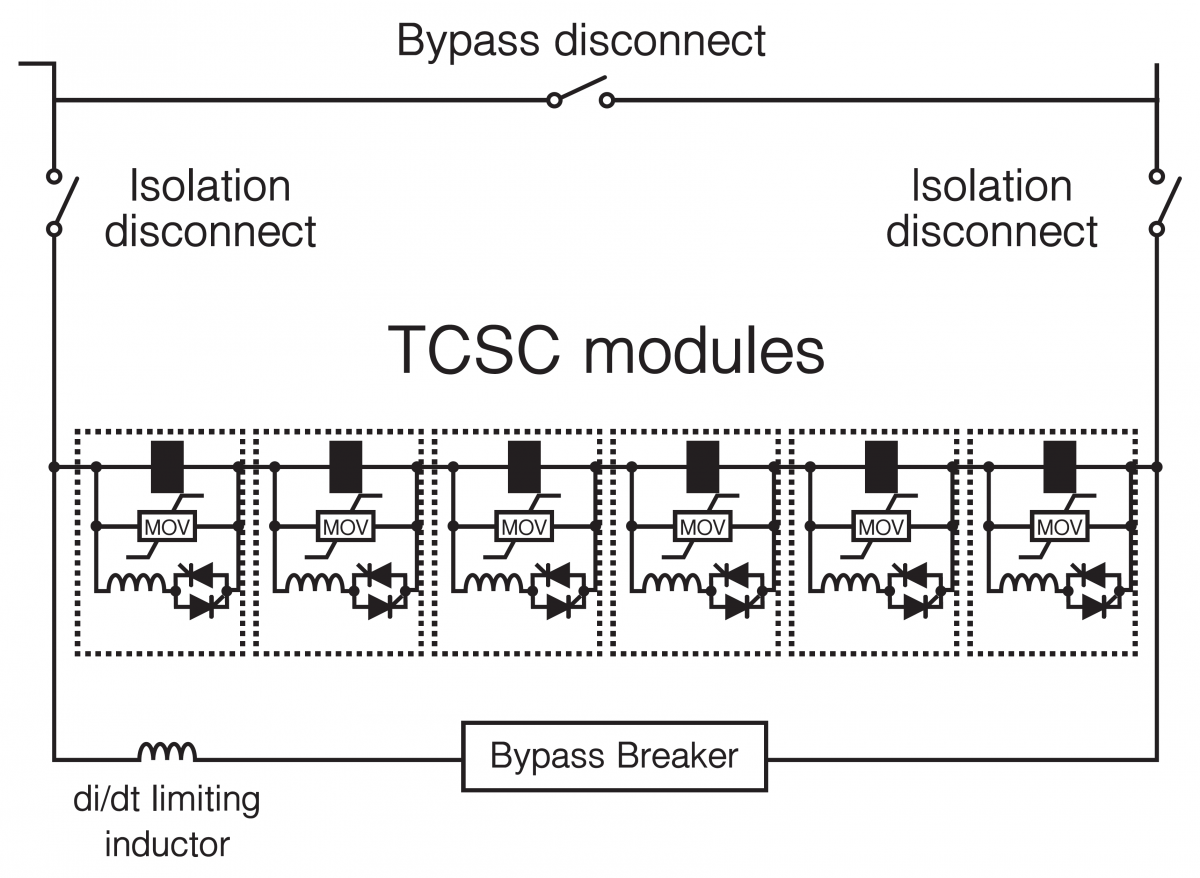
ĂŮ»·Őč 13 µŃÇÍÂčҧǧ¨ĂˇŇĂăŞé§ŇąâÁ´ŮĹ TCSC
1.2.5 ÍŘ»ˇĂłěáˇé䢤čҵŃÇ»ĂСͺˇÓĹѧ
ÍŘ»ˇĂłěáˇé䢤čҵŃÇ»ĂСͺˇÓĹѧ¶ŮˇąÓÁŇăŞéÍÂčҧáľĂčËĹŇ ŕľ×čÍĹ´¤čҡŇĂĘŮŕĘŐ¡ÓĹѧ˘Í§ĂĐşş¨čŇ áĹĐĂѡÉŇŕʶŐÂĂŔŇľáç´Ńą˘Í§ĂĐşşŔŇÂăµéʶҹˇŇĂłě·Ň§äżżéŇ·ŐčŕˇÔ´˘Öéą ŕŞčą ˇŇĂ»ĂŃş·ÔȷҧˇŇĂäËŢͧˇÓĹѧ俿éŇŕľ×čÍËĹŐˇŕĹŐ觵Óá˹觷ŐčŕˇÔ´ÍغѵÔŕËµŘ «Öč§ăąˇŇĂ´ÓŕąÔąˇŇĂąŐéĘčǹ˹Ö觨еéͧÍŇČŃ¡Ň÷ӧҹĂčÇÁˇŃą˘Í§ÍŘ»ˇĂłěáˇé䢤čҵŃÇ»ĂСͺˇÓĹѧ˘Í§ĂĐşş·Őčä´éĂŃşĽĹˇĂĐ·ş·Ńé§ËÁ´
ÍŘ»ˇĂłěáˇé䢤čҵŃÇ»ĂСͺˇÓĹѧ¨Đ·Ó§ŇąÍÂŮčşąľ×éą°Ňą˘Í§ÍÔŕĹ硷ĂÍąÔˇĘě·ŐčÁŐˇŇĂĘÇÔµŞěˇÓĹѧĘ٧ «Öč§ÍŘ»ˇĂłěąŐé¨ĐµÔ´µŃé§ÍÂŮčˇŃşŞŘ´¤Çş¤ŘÁ áĹĐÁŐĂĐşş˝Ń§µŃÇĂÇÁÍÂŮčŔŇÂăą ŕľ×čÍăËé˘éÍÁŮĹáşş real-time ˇŃşČŮąÂě¤Çş¤ŘÁĘÓËĂŃşăŞé㹡ŇõѴĘԹ㨺ĂÔËŇèѴˇŇĂĂĐşş
1.2.6 ÍŘ»ˇĂłěÍÔŕĹ硷ĂÍąÔˇĘěÍѨ©ĂÔÂĐ
ÍŘ»ˇĂłěÍÔŕĹ硷ĂÍąÔˇĘěÍѨ©ĂÔÂĐ ËĂ×Í IED (intelligent electronic device) ËÁҶ֧ ÍŘ»ˇĂłěÍÔŕĹ硷ĂÍąÔˇĘě·Őč·Ó§Ňąâ´ÂÍŇČŃÂäÁâ¤Ăâ»Ăŕ«Ęŕ«ÍĂě «Ö觺ĂèŘÍÂŮčăąĂĐşşÍѵâąÁѵԢͧʶҹŐäżżéŇÂčÍ ÁըشÍÔąŕµÍĂěŕżĘŕľ×čÍăŞéµÔ´µŇÁáĹФǺ¤ŘÁÍŘ»ˇĂłěˇŃşŕ«ąŕ«ÍĂě µŃÇÍÂčҧ˘Í§ IED ¨ĐáĘ´§´Ń§ĂŮ»·Őč 14 ä´éáˇč ÁÔŕµÍĂěáşşÁŃŵԿѧˇěŞŃą ĂŐŕĹÂě´Ô¨ÔµÍĹáĹĐŞŘ´¤Çş¤ŘÁ
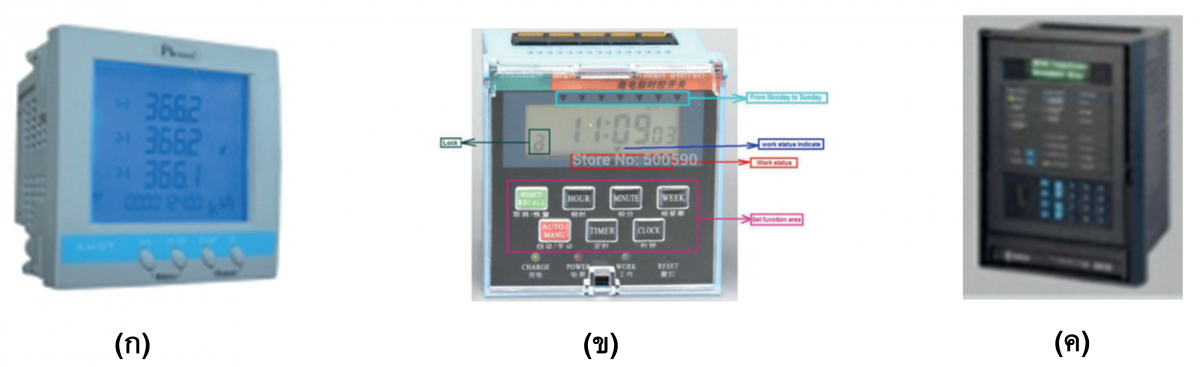
ĂŮ»·Őč 14 (ˇ) ÁÔŕµÍĂěáşşÁŃŵԿѧˇěŞŃą (˘) ĂŐŕĹÂě´Ô¨ÔµÍĹ (¤) ŞŘ´¤Çş¤ŘÁ
ĘÓËĂŃşżŃ§ˇěŞŃą·ŐčăŞé´ÓŕąÔąˇŇâͧ IED ¨Đ»ĂСͺ´éÇ¡ŇĂÇŃ´ µÔ´µŇÁ ¤Çş¤ŘÁ »éͧˇŃą áĹСŇõԴµčÍĘ×čÍĘŇĂ
ˇŇĂĘ×čÍĘŇĂŔŇÂăąĘ¶ŇąŐäżżéŇÂčͨĐăŞéˇŇĂŕŞ×čÍÁµčͷҧˇŇÂŔŇľ¤ÇŇÁŕĂçÇĘ٧ 㹢łĐ·ŐčˇŇĂĘ×čÍĘŇĂŔŇ¹͡¨ĐÍŇČŃ¡ŇĂŕŞ×čÍÁµčÍĹͨԡ¤ÍĹĽčŇąŕ¤Ă×͢čŇÂĘ×čÍĘŃŇł·Ńé§áşşÁŐĘŇÂáĹĐäĂéĘŇ ŕŞčą ŕ¤Ă×͢čŇÂĂĐşşâ·ĂČŃľ·ě ǧ¨ĂŕŞčŇ ĂĐşşäÁâ¤ĂŕÇż ´ŇÇŕ·ŐÂÁ ŕ¤Ă×͢čŇ WAN «Öč§ŕ¤Ă×͢čŇÂĘčÇąăËč¨ĐăŞéµŃǡĹҧËĹѡŕ»çąŕĘéąăÂáˇéÇąÓáʧ áĹĐâ»ĂⵤÍšŇĂĘ×čÍĘŇĂ·ŐčăŞéşąŕ¤Ă×͢čŇÂĘčÇąăËč¨ĐÍéҧÍÔ§µŇÁÁҵðҹ DNP3, IEC 60870 áĹĐ IEC 61850 MMS
˘éÍĘѧࡵ
1) ÍŘ»ˇĂłě RTU ŕ»çąÍŘ»ˇĂłěࡵŕÇÂěÍÔŕĹ硷ĂÍąÔˇĘě·Őč»ĂĐÁÇĹĽĹâ´ÂÍŇČŃÂäÁâ¤Ăâ»Ăŕ«Ęŕ«ÍĂě «Ö觨ж١¤Çş¤ŘÁˇŇõԴµčÍĘ×čÍĘŇĂ´éÇ MTU (master terminal unit) ·ŐčµŃé§ÍÂŮčăąĘ¶ŇąŐˇĹҧËĂ×ÍČŮąÂě´ÓŕąÔąˇŇĂŕ¤Ă×͢čŇ ˘éÍÁŮĹŔҤʹŇÁ¨Đ¶ŮˇĘ觨ҡ RTU ä»Âѧ MTU ľĂéÍÁˇŃşĘ¶ŇąĐ˘Í§ IED â´ÂÍŘ»ˇĂłě RTU ĘŇÁŇöµÔ´µŇÁáĹФǺ¤ŘÁ˘éÍÁŮĹä´é·Ń駷Őčŕ»çąĘŃŇłÍĐąŇĹ͡áĹĐĘŃŇł´Ô¨ÔµÍĹ ĘŇÁŇöĂͧĂŃşÁҵðҹˇŇĂŕŞ×čÍÁµčÍ͹ءĂÁ·ŐčËĹҡËĹŇÂáĹĐâ»ĂⵤÍĹÍŐŕ·ÍĂěŕąµ ŕŞčą Modbus, IEC 60870, IEC61850 MMS áĹĐ DNP3 ˇŇĂăŞéÍŘ»ˇĂłě RTU ŕľ×čÍŕ»çąŕˇµŕÇÂěăËéˇŃşŕ¤Ă×͢čҨ֧ÁŐ¤ÇŇÁŕËÁŇĐĘÁ ŕľĂŇй͡¨ŇˇÁշҧŕĹ×͡˘Í§ˇŇ÷ӧҹ·ŐčËĹҡËĹŇÂáĹéÇ ˇçÂѧÁŐ¤ÇŇÁľĂéÍÁăŞé§ŇąĘ٧¨ŇˇˇŇ÷ӧҹ·ŐčÁŐŕʶŐÂĂŔŇľ˘Í§Ç§¨ĂŔŇÂăą

ĂŮ»·Őč 15 RTU
2) ąÍˇ¨ŇˇÍŘ»ˇĂłě RTU áĹĐ IED áĹéÇ ÍŘ»ˇĂłěÍѵâąÁѵÔÍ×čą ŕŞčą PLC (programmable logic controller) áĹĐ PAC (programmable automation controller) ˇç¶ŮˇąÓÁŇăŞéˇŃşżŃ§ˇěŞŃąµÔ´µŇÁáĹФǺ¤ŘÁ˘ŃéąĘ٧ŔŇÂăąĘ¶ŇąŐäżżéŇÂčÍÂŕŞčąˇŃą â´Â PLC ¨Đŕ»çąµŃǤǺ¤ŘÁáşş real-time ·ŐčĘŇÁŇöµŃé§â»ĂáˇĂÁˇŇ÷ӧҹµŇÁÁҵðҹ IEC 61131 㹢łĐ·Őč PAC ¶ŮˇÍ͡ẺÁŇăËéÁŐĹѡɳĐŕ»çą¤ÍÁᾡ «Öč§ĂÇÁ¤ÇŇÁĘŇÁŇö˘Í§ĂĐşş¤Çş¤ŘÁáşş PC äÇéÍÂčҧ¤Ăş¶éÇą
1.2.7 ÍŘ»ˇĂłěµĂǨÇŃ´ĘŇÂĘč§
ÍŘ»ˇĂłěµĂǨÇŃ´ĘŇÂĘč§ä´éŕ˘éŇÁŇÁŐş·şŇ·ăąˇŇĂĂѡÉҤÇŇÁ»ĹÍ´ŔŃ «Öč§ĂÇÁ¶Ö§ˇĂłŐ·ŐčĘŇÂÁŐ¤ÇŇÁĂéÍąĘ٧ĽÔ´»ˇµÔ â´Â¨ĐÍŇČŃÂŕ·¤âąâĹÂŐŕ«ąŕ«ÍĂě¤ÇŇÁµÖ§ŕ¤ĂŐ´ (tension) «Ö觶١¤Ô´¤éąáĹĐąÓÁŇăŞéˇŃşĘŇÂĘ觵Ńé§áµč»Ő 1991 ËĹѧ¨ŇˇąŃ鹡çÁŐˇŇĂĽĹԵૹŕ«ÍĂě»ĂĐŕŔ·Í×čąÍ͡µŇÁÁŇ ŕŞčą ŕ«ąŕ«ÍĂěµÔ´µŇÁˇŇĂËÂčÍą˘Í§ĘŇ ૹŕ«ÍĂě·ŐčăŞéÍŃŵĂŇ«ŇÇ´ě㹡ŇĂÇŃ´¤ÇŇÁĘ٧ŕËą×Íľ×éą´Ôą ŕ«ąŕ«ÍĂěµĂǨ¨ŃşĘąŇÁäżżéŇ â´Â㹡ŇĂăŞéÍŘ»ˇĂłěµĂǨÇŃ´ĘŇÂĘč§ ĽŮé´ŮáŨÓŕ»çąµéͧ·ĂŇş»ĂĐŕŔ·áĹФسĘÁşŃµÔ˘Í§µŃÇąÓ·ŐčăŞé â´Âŕ©ľŇеŃÇąÓ˘ŃéąĘ٧µčҧ ć
µŃÇąÓ˘ŃéąĘ٧ ¨ĐĂÇÁ¶Ö§µŃÇąÓ·Őč·ąÍŘłËŔŮÁÔä´éĘ٧ ÁŐˇŇĂËÂčÍą˘Í§ĘҵčÓ áÁéÇčŇÍŘłËŔŮÁÔ¨ĐŕľÔčÁÁҡ¶Ö§ 200oC áµčĹѡɳзҧ俿éҡçÂѧ¤§ŕËÁ×ÍąˇŃşµŃÇąÓ»ˇµÔ ·ÓăËéŕÁ×čÍąÓÁŇăŞéˇŃşĘŇÂĘ觨֧ĘŇÁŇöĂͧĂŃşˇŇĂĘ觡ĂĐáĘáĹСÓĹѧ俿éŇ»ĂÔÁŇłÁҡŕÁ×čÍŕ»ĂŐÂşŕ·ŐÂşˇŃşµŃÇąÓ·ŃčÇä» ăą»Ń¨¨ŘşŃąµŃÇąÓ»ĂĐŕŔ·ąŐéä´é¶ŮˇąÓÁŇăŞéˇŃş§ŇąľÔŕČÉşąâ¤Ă§ĘĂéҧ˘Í§ĂĐşşŕ´ÔÁ µŃÇąÓËĹѡ·Őč¶Ůˇ¨ÓËąčŇÂăąŕŞÔ§ľŇłÔŞÂě¨ĐÁŐÍÂŮč 3 »ĂĐŕŔ·¤×Í ACCR (Aluminum conductor composite reinforced) ACCC (Aluminum conductor composite core) áĹĐ ACSS (Aluminum conductor steel supported)
˘éÍĘѧࡵ
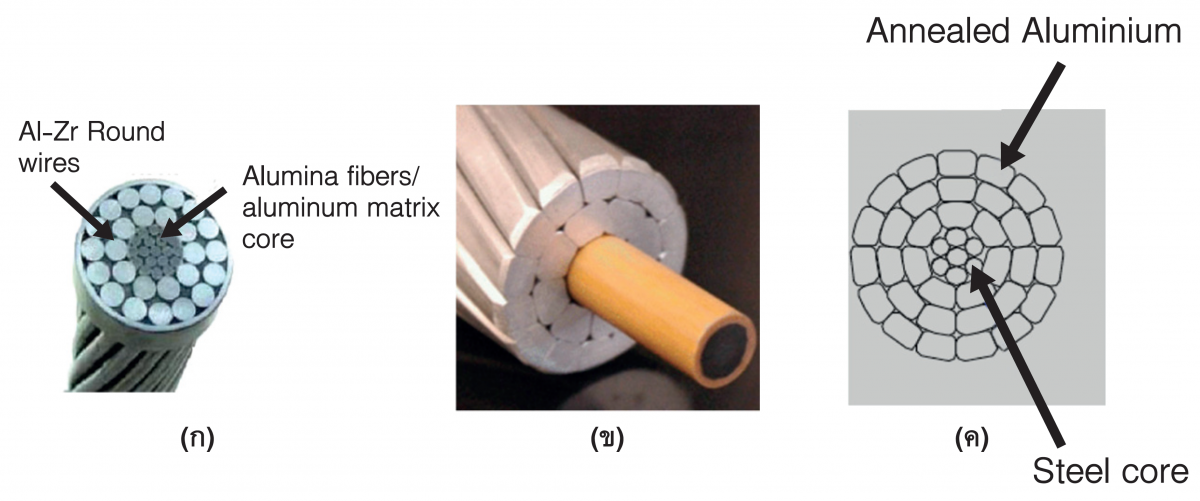
ĂŮ»·Őč 16 (ˇ) ACCR (˘) ACCC (¤) ACSS
1.2.8 â¤Ă§ĘĂéҧľ×éą°ŇąÁÔŕµÍĂě˘ŃéąĘ٧
â¤Ă§ĘĂéҧľ×éą°ŇąÁÔŕµÍĂě˘ŃéąĘ٧ ËĂ×Í AMI (advanced metering infrastructure) ËÁҶ֧â¤Ă§ĘĂéҧáĹĐŕ·¤âąâĹÂŐ˘éÍÁŮŢčŇÇĘŇĂ ĂŇÂĹĐŕÍŐ´˘Í§ˇŇĂăŞéäżżéŇ áĹĐʶҹзŐčĂÇşĂÇÁä´é¨ŇˇĘÁŇĂě·ÁÔŕµÍĂě «Ö觡ŇĂăŞéâ¤Ă§ĘĂéҧľ×éą°ŇąÁÔŕµÍĂě˘ŃéąĘ٧ ¨ĐăËé˘éÍÁŮĹ´ŐˇÇčҡŇĂăŞéÁÔŕµÍĂěáşşŕ´ÔÁ ŕą×čͧ¨Ňˇăą AMI ¨ĐÁŇľĂéÍÁˇŃş·Ň§ŕĹ×͡˘Í§ˇŇõԴµčÍĘ×čÍĘŇĂĽčŇąŕ¤Ă×͢čŇ¢éÍÁŮĹ ŕľ×č͡ŇõԴµŇÁĂĐÂĐäˇĹËĂ×͡ŇĂŕĂŐ¡ŕˇçşŕ§Ôą â´ÂˇŇõԴµčÍĘ×čÍĘŇâͧ AMI ¨Đŕ»çąáşşĘͧ·Ň§ĂĐËÇčҧĽŮéăËéşĂÔˇŇáѺĽŮéăŞé ŕŞčą 㹢Ń鹵͹˘Í§ˇŇõͺʹͧ¤ÇŇÁµéͧˇŇĂ ˇĂкǹˇŇõčÍáĹлŴâËĹ´ ˇŇäǺ¤ŘÁ volt/VAR ˇŇõͺʹͧÍѵâąÁѵԢͧÍŘ»ˇĂłěµč͡ŇõŃ駤čŇăËÁč㹡óբͧˇŇĂż×éąµŃÇ
ÍÂčҧäáçµŇÁ ¨ŇˇˇŇĂ·ŐčČŮąÂě¤Çş¤ŘÁÁŐˇŇõԴµč͡ѺÁÔŕµÍĂěĽŮéăŞéäżżéŇŕ»çą¨ÓąÇąÁҡ ÂčÍÁĘ觼ĹăËé¤ÇŇÁ»ĹÍ´ŔŃ·ҧˇŇÂŔŇľáĹзҧĹͨԡ¤ÍŢͧÁÔŕµÍĂěÁŐąéÍ¡ÇčŇáşşŕ´ÔÁ ´Ń§ąŃéą ĽŮé´ŮáŨ֧¨Óŕ»çąµéͧÁŐˇŇĂ»ˇ»éͧŞčͧ·Ň§ˇŇĂĘ×čÍĘŇĂáĹТéÍÁŮĹÁÔŕµÍĂěşąŕ¤Ă×͢čŇ AMI ¨ŇˇˇŇäء¤ŇÁŔŇ¹͡ «Öč§ăąÁҵðҹä´éáąĐąÓÇÔ¸ŐˇŇĂŕ˘éŇĂËŃĘáĹСŇõĂǨĘÍşäÇé â´ÂĂٻẺˇŇĂŕ˘éŇĂËŃʨеéͧÁŐˇŇĂ´ÓŕąÔąˇŇĂ·Őčµéą·Ň§áĹĐ»ĹŇ·ҧ˘Í§ˇŇõԴµčÍĘ×čÍĘŇĂ·Ńé§Ęͧ´éŇą
ĂŮ»·Őč 17 áĘ´§ˇŇĂĂÇşĂÇÁ˘éÍÁŮŷҧäˇĹ˘Í§ AMI «Öč§ÁŐͧ¤ě»ĂСͺĘÓ¤Ń 4 ĘčÇą ¤×Í
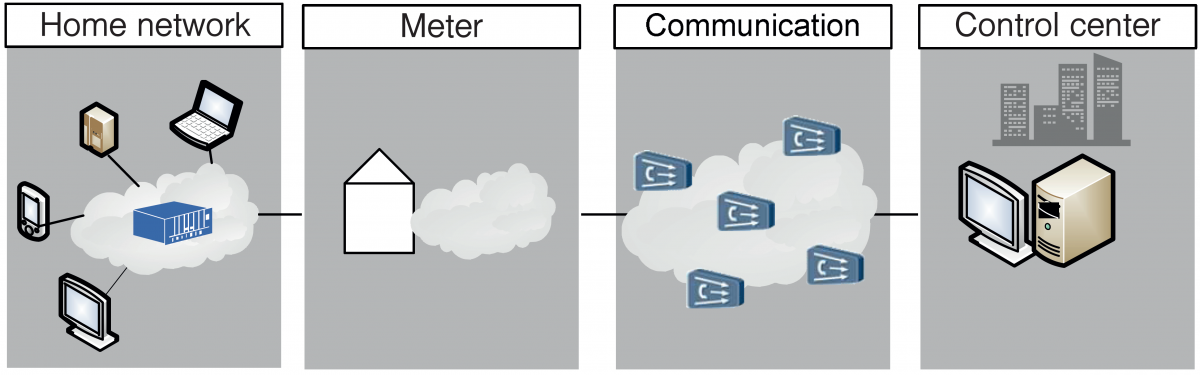
ĂŮ»·Őč 17 ͧ¤ě»ĂСͺ˘Í§ˇŇĂĂÇşĂÇÁ˘éÍÁŮŷҧäˇĹĘÓËĂŃş AMI
ĂŮ»·Őč 18 áĘ´§ˇŇĂĂÇÁ˘éÍÁŮŨҡĘÁŇĂě·ÁÔŕµÍĂěŕ˘éŇä»ÂѧĂĐşş DMS (distribution management system) ˘Í§ČŮąÂě¤Çş¤ŘÁˇĂШŇ «Ö觨зÓăËéŕˇÔ´ˇŇĂăŞé§ŇąĂٻẺăËÁčşąĘÁŇĂě·ˇĂÔ´ ÍÂčҧäáçµŇÁ Áҵðҹ˘Í§ˇŇĂĂÇÁˇŃąąŐéÂѧäÁčÍ͡ÁŇŕ»çą·Ň§ˇŇĂ ŕą×čͧ¨ŇˇÂѧÁŐ¤ÇŇÁËĹҡËĹŇ¢ͧ෤âąâĹÂŐ AMI áĹФÇŇÁµéͧˇŇĂăŞé§ŇąĘÁŇĂě·ˇĂÔ´·ŐčᵡµčҧˇŃą ´Ń§ąŃ鹨֧ÁŐˇŇĂăŞéŕ«ÔżŕÇÍĂěşĂÔËŇâéÍÁŮĹÁÔŕµÍĂě MDMS ÁŇŕ»çąµŃÇá»Ĺ§˘éÍÁŮĹ AMI ¨ŇˇáµčĹĐŕ·¤âąâĹÂŐ AMI ˇčÍąŕ˘éŇÁŇÂѧşŃĘşĂÔˇŇâͧĂĐşş
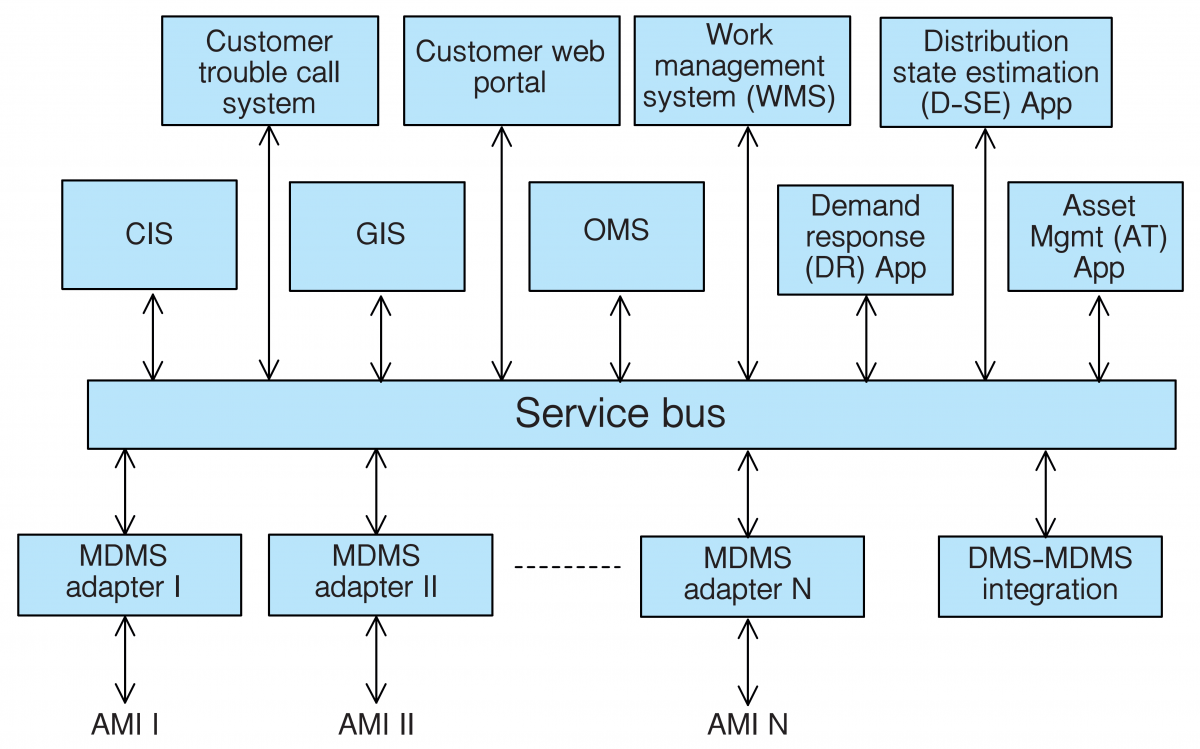
ĂŮ»·Őč 18 ÁŘÁÁͧĂĐşş DMS ·ŐčĂÇÁ AMI ¨Ňˇµčҧ෤âąâĹÂŐ
ˇŇĂĂÇÁ˘éÍÁŮŨҡĘÁŇĂě·ÁÔŕµÍĂěáĹĐŕ«ąŕ«ÍĂěŕ˘éŇÁŇăąĂĐşş DMS ąÍˇ¨ŇˇˇŇ÷ӧҹ´Ń§ˇĹčŇǢéҧµéąáĹéÇ ÂѧÁŐŕĂ×čͧ˘Í§ˇŇĂ»ĂĐŕÁԹʶҹСŇáĂШŇ (distribution state estimation, D-SE) «Öč§ŕ»çąˇĹŘčÁ˘éÍÁŮĹ·ŐčşÍˇ¶Ö§ĹѡɳĐáĹпѧˇěŞŃą˘Í§ŕ§×č͹䢡ŇĂ´ÓŕąÔąˇŇĂĂĐşş ŕŞčą ˇŇĂ»éͧˇŃą ˇŇäǺ¤ŘÁ ˇŇĂ·ÓÍÍ»µÔäÁ«ě D-SE ¨ĐăŞéˇŇĂÇÔŕ¤ĂŇĐËě·Ň§Ę¶ÔµÔáĹĐŕ·¤ąÔ¤ˇŇĂÍÍ»µÔäÁ«ěşąáşş¨ÓĹͧ real-time ŕľ×čÍăËéä´éˇŇĂ»ĂĐŕÁԹʶҹзŐč´Ő·ŐčĘŘ´¨ŇˇĽĹˇŇĂÇŃ´·ŐčĂÇşĂÇÁÁŇ·Ńé§ËÁ´
1.2.9 ÁÔŕµÍĂěÍѨ©ĂÔÂĐ
㹡Ňè٧ă¨ăËéĽŮéăŞé»ĂŃşŕ»ĹŐčÂąľÄµÔˇĂĂÁˇŇĂăŞéäżżéŇ ¶éŇŕ»çąĂĐşşÁÔŕµÍĂěáşşŕˇčŇ ĽŮéăŞéÍҨµéͧĂͶ֧ĘÔéąŕ´×Íąŕľ×č͵ĂǨĘÍş»ĂÔÁŇłˇŇĂăŞéäżżéŇáĹФčŇăŞé¨čŇ·ŐčŕˇÔ´˘Öéą «Öč§ÇÔ¸ŐˇŇĂąŐé¨ĐäÁčˇĂеŘéąáĹШ٧ă¨ăËéŕˇÔ´ˇŇĂŕ»ĹŐčÂąá»Ĺ§ÁҡąŃˇ äÁčŕËÁ×ÍąˇŃşˇŇĂ·ÓăËéĽŮéăŞéä´é·ĂŇşĽĹ˘Í§ˇŇáĂĐ·ÓşčÍ¢Öéą ŕŞčą ˇŇĂá¨é§ŕ»çąĂŇÂÇŃą «Ö觡ŇĂ´ÓŕąÔąˇŇĂąŐé¨Óŕ»çąµéͧÍŇČŃÂÁÔŕµÍĂěÍѨ©ĂÔÂĐ (smart meter)
ĂŮ»·Őč 19 (ˇ) áĘ´§µŃÇÍÂčҧÁÔŕµÍĂě EDSM (electronic domestic supply meter) ·ŐčăŞé㹡ŇĂĂÇşĂÇÁ˘éÍÁŮžĵԡĂĂÁˇŇĂăŞéäżżéŇáĹФčŇăŞé¨čŇ ŕÁ×čÍĂÇÁÁÔŕµÍĂěąŐéŕ˘éҡѺࡵŕÇÂě˘éÍÁŮŴѧĂŮ»·Őč 19 (˘) ˇç¨Đ·ÓăËéˇĹŇÂŕ»çąÁÔŕµÍĂěÍѨ©ĂÔÂĐ·ŐčĘÁşŮĂłě «Ö觹͡¨Ňˇ¨Đŕˇçş˘éÍÁŮĹ·ŐčŕˇŐčÂǢéͧˇŃşˇŇĂăŞéäżżéŇáĹéÇ ÂѧÁŐ˘éÍÁŮšŇĂăŞé·ĂŃľÂҡĂÍ×čą ć ŔŇÂăą·ŐčÍÂŮčÍŇČŃÂÍŐˇ´éÇÂŕŞčą ąéÓ áˇęĘ â´Â˘éÍÁŮĹ·ŐčࡵŕÇÂě¨ĐĘŇÁŇöąÓŕĘąÍăËéˇŃşĽŮéăŞéä´éËĹŇÂĂٻẺ ŕŞčą ˇŇĂá¨é§ŕµ×ÍąĽčŇą¤ÍÁľÔÇŕµÍĂě ˇŇĂá¨é§ŕµ×ÍąĽčŇąâ·ĂČŃľ·ěÁ×Ͷ×Í
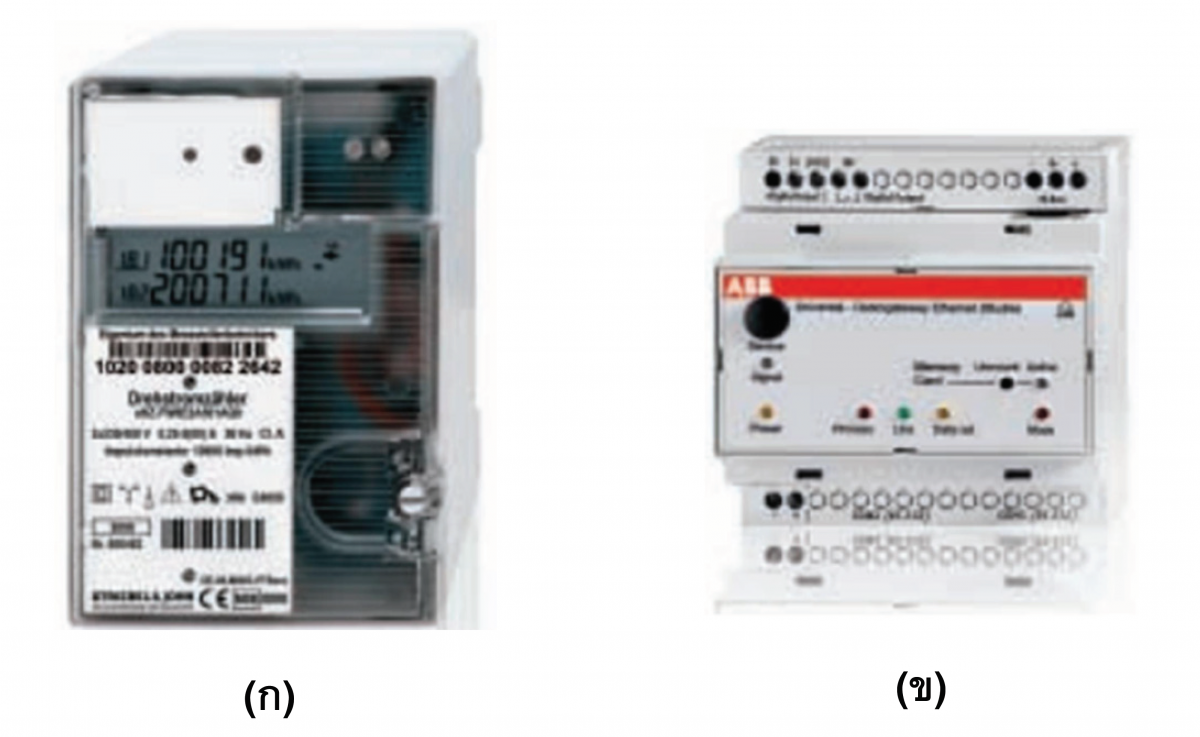
ĂŮ»·Őč 19 (ˇ) ÁÔŕµÍĂě EDSM (˘) ࡵŕÇÂě˘éÍÁŮĹ
1.3 ˇŇĂăŞé§Ňą
㹡ŇĂăŞé§Ňą¨Đä´éˇĹčŇǶ֧ËŃǢéÍ·ŐčĘÓ¤Ńä´éáˇč ÍŘ»ˇĂłěµÔ´µŇÁˇŇĂĂşˇÇąăąĂĐşşäżżéҡÓĹѧ (disturbance monitoring equipment, DME) ἹáĹĐĂĐşş»éͧˇŃąľÔŕČÉ (special protection system, SPS) ĂĐşşşĂÔËŇèѴˇŇĂ WAMS (wide area management system) ˇŇäǺ¤ŘÁ volt/VAR ˇŇâ¨Ń´âËĹ´·ŐčÁŐ¤ÇŇÁ¶ŐčµčÓ ˇŇâ¨Ń´âËĹ´·ŐčÁŐáç´ŃąµčÓ ˇŇõͺʹͧ¤ÇŇÁµéͧˇŇĂ (demand response) áĹĐĂĐşşľÔˇŃ´ĘŇÂä´ąŇÁÔˇ (dynamic line rating, DLR)
1.3.1 ÍŘ»ˇĂłěµÔ´µŇÁˇŇĂĂşˇÇą
ÍŘ»ˇĂłěµÔ´µŇÁˇŇĂĂşˇÇąăąĂĐşşäżżéҡÓĹѧ (disturbance monitoring equipment, DME) ËÁҶ֧ ŕ¤Ă×čͧÁ×Í·ŐčÁŐ¤ÇŇÁĘŇÁŇöµÔ´µŇÁáĹкѹ·Öˇ˘éÍÁŮĹĂĐşş·ŐčŕˇŐčÂǢéͧˇŃşˇŇĂĂşˇÇą ĂÇÁ¶Ö§ĂٻẺˇŇõŃ駤čŇ ä´éáˇč
ÍŘ»ˇĂłěµÔ´µŇÁˇŇĂĂşˇÇąăąĂĐşşäżżéŇ ¤ÇĂÁŐŕÇĹŇ«Ô§â¤Ăäą«ě·Őč¶ŮˇµéͧáĹĐÁŐŕʶŐÂĂŔŇľ ŕľ×čÍăËéĘŇÁŇöµÍşĘąÍ§áĹĐá¨é§ŕµ×Íąä´éÍÂčҧáÁčąÂÓ â´ÂˇŇĂŕ˘éҶ֧ŕ¤Ă×͢čŇ·ŐčäÁčä´éĂѺ͹Řҵ¨Đ¶Ůˇ¤Çş¤ŘÁáĹĐ»éͧˇŃą ŕŞčąŕ´ŐÂǡѺˇŇõԴµŇÁáĹСŇĂÇŃ´˘éÍÁŮĹżÍĹ·ě ĂŮ»·Őč 20 áĘ´§µŃÇÍÂčҧĽĹˇŇúѹ·Öˇ»ĂÔÁŇł·Ň§äżżéŇä´éáˇč áç´Ńą ˇĂĐáĘ ˇÓĹѧ俿éŇ ¤ÇŇÁ¶Őč áĹмšŇĂ«Ô§â¤Ăäą«ě·Ň§ŕÇĹŇ ¨ŇˇˇŇĂĂşˇÇą·ŐčŕˇÔ´˘Ö鹡ѺĂĐşşăąŞčǧŕÇĹŇ 2 ŞÁ
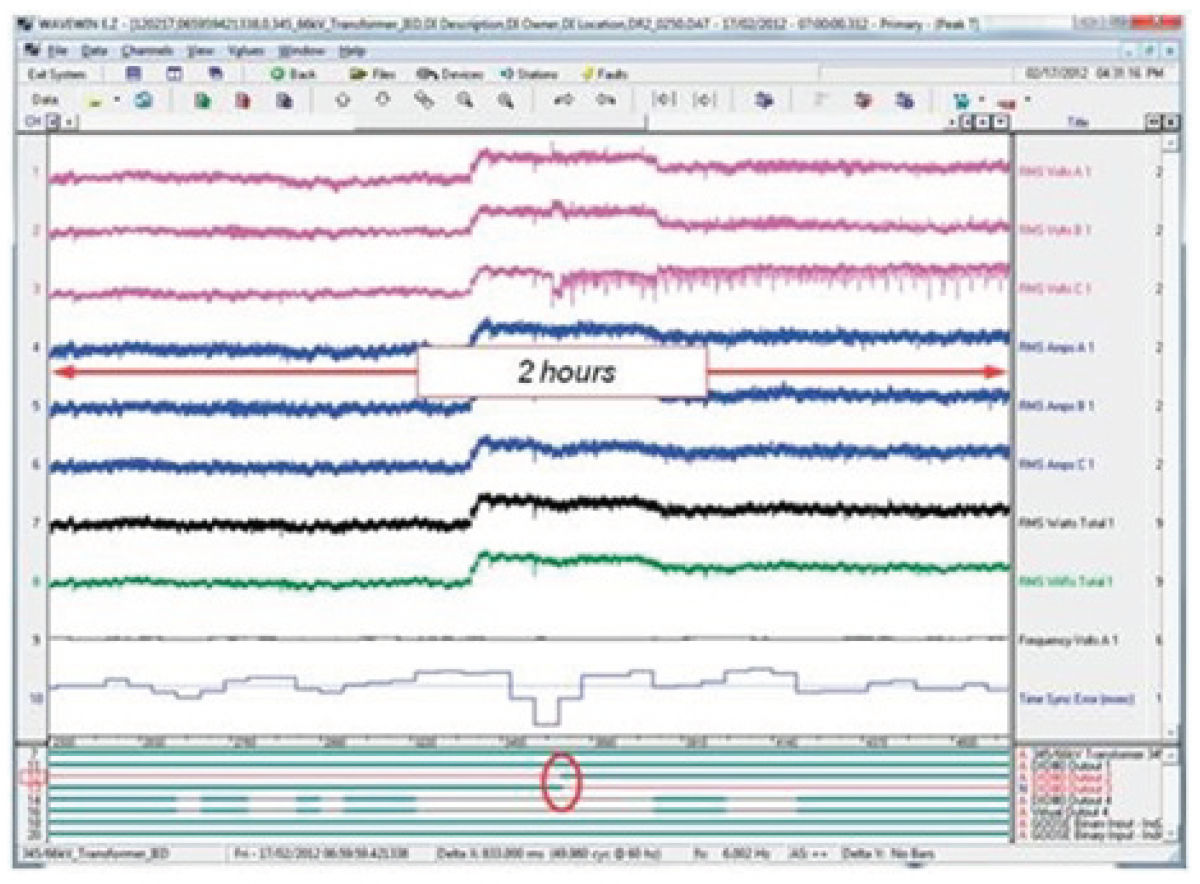
ĂŮ»·Őč 20 µŃÇÍÂčҧĽĹˇŇúѹ·Öˇ»ĂÔÁŇł·Ň§äżżéҨҡˇŇĂĂşˇÇąăąĂĐşşäżżéҡÓĹѧ
1.3.2 ἹáĹĐĂĐşş»éͧˇŃąľÔŕČÉ
ἹáĹĐĂĐşş»éͧˇŃąľÔŕČÉ (special protection system, SPS) ËĂ×ÍἹ»ŻÔşŃµÔˇŇĂáˇéä˘ ËÁҶ֧ĂĐşş»éͧˇŃąÍѵâąÁŃµÔ ·Őč¶ŮˇÍ͡ẺÁŇŕľ×č͵ĂǨ¨Ńşŕ§×č͹䢷ŐčĽÔ´»ˇµÔ «Ö觨ĐŕąéąˇŇĂáˇéä˘ÁҡˇÇčҡŇõѴËĂ×Íá¡ĘčÇą·ŐčÁŐŕ˵ŘŕĘŐÂÍ͡ ·ÓăËéˇŇĂşĂÔˇŇâͧĂĐşşâ´ÂĂÇÁÁŐ¤ÇŇÁąčŇŕŞ×čͶ×Í
ˇŇĂ´ÓŕąÔąˇŇâͧ SPS ¨ĐĂÇÁ¶Ö§ˇŇĂŕ»ĹŐčÂąá»Ĺ§¤ÇŇÁµéͧˇŇĂ ˇŇĂŕ»ĹŐčÂąá»Ĺ§ˇÓĹѧˇŇĂĽĹÔµ (MW áĹĐ MVAR) áĹСŇõŃ駤čŇŕľ×čÍĂѡÉŇŕʶŐÂĂŔŇľ/ĂĐ´Ńşáç´Ńą/ˇŇĂäËŢͧˇÓĹѧ俿éŇ áÁéÇčŇăą SPS äÁčä´éĂĐşŘÇѵ¶Ř»ĂĐʧ¤ěäÇéµŇµŃÇ áµč´éÇ¡ŇþѲąŇ˘Í§ŕ·¤âąâĹÂŐäÁâ¤Ăâ»Ăŕ«Ęŕ«ÍĂě ¨Ö§·ÓăËéĘÁŇĂě·ˇĂÔ´ÁշҧŕĹ×͡ÍÂčҧËĹҡËĹŇ·Őč¨ĐąÓáąÇ¤Ô´˘Í§ SPS ÁŇăŞéˇŃşˇŇõԴµŇÁáĹСŇĂ´ÓŕąÔąˇŇâͧĂĐşşäżżéŇ â´ÂˇĂкǹˇŇĂÍ͡Ẻ SPS ĘŇÁŇöáşč§ä´éŕ»çą 5 ˘Ń鹵͹ ¤×Í
1) ˇŇĂČÖˇÉŇĂĐşş
2) ˇŇþѲąŇáąÇ·Ň§´ÓŕąÔą§Ňą
3) ˇŇĂÍ͡ẺáĹеԴµŃé§
4) ŞčǧŕÇĹҡŇõĂǨĂŃşáĹĐ·ÓˇŇĂ·´ĘÍş
5) ˇŇý֡ͺĂÁŕľ×čÍăËéĽŮ黯ԺѵԧҹĘŇÁŇö¤Çş¤ŘÁĘŃ觡ŇĂä´éµŇÁŕ»éŇËÁŇ·ŐčµŃé§äÇé
˘éÍĘѧࡵ: ăąáĽąáĹĐĂĐşş»éͧˇŃąľÔŕČɨÓŕ»çąµéͧÍŇČŃÂĂĐşşĂŐŕĹÂě˘ŃéąĘ٧ ŕľ×čÍăËéÁŐÁŘÁÁͧˇŇõԴµŇÁáĹСŇĂ»éͧˇŃą·ŐčˇÇéҧ˘Öéą â´ÂĂĐşşĂŐŕĹÂě˘ŃéąĘ٧¨ĐÍŇČŃÂŕ·¤âąâĹÂŐäÁâ¤Ăâ»Ăŕ«Ęŕ«ÍĂě «Öč§ăËé»ĂĐâÂŞąěÁҡˇÇčҡŇĂ»éͧˇŃąáşşŕ´ÔÁ·Őčŕ»çą electro-mechanical ˇŇĂĘ×čÍĘŇĂẺ͹ءĂÁáĹĐÍŐŕ·ÍĂěŕąµ·ŐčĂÇÁÍÂŮč㹡Ň÷ӧҹ˘Í§ĂŐŕĹÂě˘ŃéąĘ٧ä´éąÓÁŇĘŮčˇŇ÷ӧҹʹѺʹع·ŐčĘÓ¤Ń ä´éáˇč ˇŇĂÇŃ´ŕżĘŕ«ÍĂě ˇŇõĂǨËҵÓá˹觢ͧżÍĹ·ě ˇŇĂËҢմ¨ÓˇŃ´âËĹ´ĂÇÁ¶Ö§ŕ§×čÍąä˘Í×čą·Őč¨Óŕ»çąµč͡ŇĂáˇéä˘ ˘éÍÁŮĹŕËĹčŇąŐé¨ĐŞčÇÂŕµ×ÍąăËéĽŮé´ŮáĹä´éµĂĐ˹ѡ¶Ö§»ŃËҢͧŔŇĂĐâËĹ´ËĂ×͡ŇĂáˇÇ觢ͧ»ĂÔÁŇł·Ň§äżżéŇ·ŐčŕˇÔ´˘Ö鹡ѺĂĐşş
ĂĐşşĂŐŕĹÂě˘ŃéąĘ٧¨ĐŞčÇÂăËéˇŇäǺ¤ŘÁáĹСŇõŃ駤čŇĘŇÁŇöä´é·ÓÍÂčҧ䴹ŇÁÔˇ â´ÂÁŐľŇĂŇÁÔŕµÍĂěËĹѡ·ŐčăŞé㹡ŇõԴµŇÁ ´Ń§ąŐé
1.3.3 ĂĐşşşĂÔËŇèѴˇŇĂ WAMS
ĂĐşşşĂÔËŇèѴˇŇĂ WAMS (wide area management system) ËĂ×Í WATSS (wide area time domain GPS synchronized sampling) ŕ»çąˇŇĂáĘ´§ŕ§×č͹䢡ŇĂŕŞ×čÍÁµčͧ͢ĂĐşşäżżéҡÓĹѧẺ real-time µŇÁˇŇõŃ駤čŇ·Őčŕ»çąˇŇ÷ӧҹĂčÇÁˇŃą â´ÂĂĐşş WAMS ¨ĐŞčÇÂăËéĽŮé´ŮáĹä´éĂŃş·ĂŇş˘éÍÁŮĹʶҹТͧĂĐşşäżżéŇ ·ÓăËéŕËçąŔŇľĂÇÁˇŇ÷ӧҹ˘Í§ˇĂÔ´ ĘŇÁŇöąÓÁŇăŞéăËéŕˇÔ´»ĂĐâÂŞąěˇŃşˇŇèѴˇŇĂ â´Âŕ©ľŇСŇĂĘÇÔµŞěľÔˇŃ´¤ÇŇÁ¨ŘĘҨҡĘáµµÔˇä»ŕ»çąä´ąŇÁÔˇ
ŕ·¤âąâĹÂբͧ WAMS ¨ĐŞčÇÂăËéˇŇäǺ¤ŘÁżŃ§ˇěŞŃąˇŇ÷ӧҹşąâ¤Ă§ĘĂéҧľ×éą°Ňą˘Í§ĂĐşşäżżéŇŕ»çąä»ÍÂčҧáÁčąÂÓáĹĐĂÇ´ŕĂçÇ ĘÓËĂŃşżŃ§ˇěŞŃąˇŇĂăŞé§Ňą·Őčŕ»çąä»ä´é¨ĐÁմѧąŐé
1.3.4 ˇŇäǺ¤ŘÁ volt/VAR
ˇŇäǺ¤ŘÁ volt/VAR áşşĂÇÁ´éÇ IVVC (integrated Volt/VAR control) ËĂ×ÍáşşĂÇÁČŮąÂě´éÇ CVVC (centralized volt/VAR control) ¨Đŕ»çąÇÔ¸ŐŕľÔčÁ»ĂĐĘÔ·¸ÔŔŇľ´éÇ¡ŇĂÍÍ»µÔäÁ«ěŕľ×čÍăËéä´éµŃÇ»ĂСͺˇÓĹѧÁŐ¤čŇăˇĹéŕ¤Ő§ 1 áĹĐăËéä´éĹѡɳТͧáç´ŃąµŇÁ·ŐčˇÓËą´ â´Â IVVC ¨ĐŞčÇÂşĂÔËŇèѴˇŇĂáç´ŃąáĹĐ VAR ˘Í§ˇĂÔ´ ÁŐˇŇĂÇÔŕ¤ĂŇĐËěáç´Ńą¨ŇˇŞŘ´ĂѡÉŇĂĐ´Ńşáç´Ńą áĹĐÁŐˇŇĂăŞéÍŘ»ˇĂłěÍ×čąÁŇʹѺʹعˇŇ÷ӧҹŕŞčą ËÁéÍá»Ĺ§·Őčŕ»ĹŐčÂąá»Ĺ§á·»âËĹ´ ÍŘ»ˇĂłěáˇé䢤čҵŃÇ»ĂСͺˇÓĹѧ ŕ«ąŕ«ÍĂěáç´Ńą ÁÔŕµÍĂě˝Ń觼ŮéăŞéäżżéŇ áĹШشµÔ´µŇÁŕľÔčÁŕµÔÁ â´Â IVVC ĘŇÁŇö¶ŮˇąÓÁŇĂÇÁŕ˘éҡѺĂĐşş SCADA, DMS ËĂ×Í OMS ŕľ×čͤǺ¤ŘÁˇŇĂ´ÓŕąÔąˇŇĂáĹеԴµŇÁŕ§×č͹䢢ͧˇĂÔ´ä´éáşş real-time
1.3.5 ˇŇâ¨Ń´âËĹ´·ŐčÁŐ¤ÇŇÁ¶ŐčµčÓ
ˇŇĂ´ÓŕąÔąˇŇĂăąĘ¶ŇąĐ¤§µŃǨÓŕ»çąµéͧÁŐ¤ÇŇÁĘÁ´ŘĹĂĐËÇčҧáËĹ觡ÓŕąÔ´ˇŃşâËĹ´ 㹡óշŐčÁŐˇŇĂŕ»ĹŐčÂąá»Ĺ§ÍÂčҧĂÇ´ŕĂçǢͧáËĹ觡ÓŕąÔ´¨Ňˇŕ§×č͹䢷ŐčĽÔ´»ˇµÔ ŕŞčą ˇŇâҴËŇÂ仢ͧŕ¤Ă×čͧˇÓŕąÔ´äżżéŇŕą×čͧ¨ŇˇŕˇÔ´ŕ˵ŘŕĘŐ ÂčÍÁĘ觼ĹăËéʶҹФ§µŃÇ㹢łĐąŃ鹶١úˇÇą ¤ÇŇÁ¶Őč˘Í§ĂĐşşˇç¨ĐŕĂÔčÁŕˇÔ´ˇŇĂŕşŐč§ູÍ͡¨Ňˇ¤čŇ»ˇµÔ ĂĐşş·Őč´ÓŕąÔąˇŇĂşą¤ÇŇÁ¶Őč·ŐčµčӨҡ¤čŇ»ˇµÔ ÂčÍÁĘ觼ĹăËéˇŇ÷ӧҹ˘Í§Í§¤ě»ĂСͺµčҧ ć ÍҨŕˇÔ´¤ÇŇÁşˇľĂčͧ˘Öéąä´é â´Âŕ©ľŇĐĘčÇą·Őčŕ»çąˇŃ§ËŃą «Ö觶éҤÇŇÁᵡµčҧÁŐÁҡˇçÍҨ·ÓăËéŕˇÔ´ˇŇĂËĹŘ´Í͡˘Í§ŕ¤Ă×čͧˇÓŕąÔ´äżżéŇ ´Ń§ąŃéą ŕľ×čÍŕ»çąˇŇĂ»éͧˇŃą»ŃËŇ·ŐčÍҨŕˇÔ´˘Öéą ĽŮé´ŮáĹĂĐşş¨Ö§¤ÇĂ´ÓŕąÔąˇŇâ¨Ń´âËĹ´·ŐčÁŐ¤ÇŇÁ¶ŐčµčÓ (under-frequency load shedding, UFLS) Í͡
1.3.6 ˇŇâ¨Ń´âËĹ´·ŐčÁŐáç´ŃąµčÓ
ˇŇâ¨Ń´âËĹ´·ŐčÁŐáç´ŃąµčÓ (under-voltage load shedding, UVLS) ¨Đ¤ĹéŇ¡ѺˇŇâ¨Ń´âËĹ´·ŐčÁŐ¤ÇŇÁ¶ŐčµčÓ â´ÂĂٻẺ˘Í§ UVLS ¨ĐąÓÁŇăŞéˇŃşĂĐşşäżżéҡÓĹѧ ŕľ×čÍ»éͧˇŃąĂĐşş¨ŇˇˇŇĂŴŧ˘Í§áç´Ńą ËĂ×Í ˇŇĂ´ÓŕąÔąˇŇĂăąĘŔŇÇĐáç´ŃąµčÓ·Őč¶Ůˇ·ÓăËéÂ×´ŕÂ×éÍÂŇǹҹ ĂٻẺ˘Í§ UVLS ¤Çö١Í͡Ẻşąŕ§×č͹䢷ŐčąÓä»ĘŮčˇŇĂŴŧ˘Í§áç´Ńą «Ö觨еéͧᵡµčҧ¨Ňˇŕ§×č͹䢢ͧżÍĹ·ě ËĂ×͡ŇĂŴŧ·ŐčŕˇÔ´¨Ňˇáç´Ńą·ĂŇąŕ«ŐÂąµě
1.3.7 ˇŇõͺʹͧ¤ÇŇÁµéͧˇŇĂ
ˇŘá¨ĘÓ¤ŃÍÂčҧ˹Ö觢ͧĘÁŇĂě·ˇĂÔ´ˇç¤×Í ˇŇĂÁŐĘčÇąĂčÇÁ˘Í§ĽŮéăŞéäżżéŇ â´ÂĂĐşş¨Đµéͧ¤ÓąÖ§¶Ö§ˇŇõͺʹͧ¤ÇŇÁµéͧˇŇĂ «Öč§ŕ»çąˇŇĂŕ»ĹŐčÂąá»Ĺ§ăąĂĐÂĐĘŃ鹢ͧ¤ÇŇÁµéͧˇŇĂăŞéäżżéҢͧĽŮéăŞé»ĹŇ·ҧ ·ŐčµÍşĘąÍ§ˇŃşˇŇĂŕ»ĹŐčÂąá»Ĺ§ËĂ×Íáç¨Ů§ă¨ ŕŞčą ˇŇĂăËéĘčǹŴ´éŇąĂҤҡѺˇŇĂăŞéäżżéŇ㹺ҧŞčǧŕÇĹŇ
㹡ŇĂ´ÓŕąÔąˇŇôѧˇĹčŇÇ ĽŮé´ŮáĹĂĐşşĘŇÁŇö·Óä´éâ´ÂăŞéâ»ĂáˇĂÁşĂÔËŇáŇõͺʹͧ¤ÇŇÁµéͧˇŇĂ (demand response) «Ö觶١ľŃ˛ąŇ˘Öéąŕľ×čÍăËéĽŮéăŞéŕ˘éŇÁŇŕ»çąĘčǹ˹Ö觢ͧˇĹÂŘ·¸ěˇŇĂşĂÔËŇèѴˇŇĂâËĹ´ŔŇÂ㹡ĂÔ´ â´ÂÁŐÇѵ¶Ř»ĂĐʧ¤ě㹡ŇĂ»ĂŃşŕ»ĹŐčÂąâËĹ´ ŕľ×čÍŞčÇÂăËéˇĂÔ´ŕˇÔ´¤ÇŇÁĘÁ´ŘĹ ŕÁ×čͤÇŇÁ¨Ř˘Í§ŕ¤Ă×čͧˇÓŕąÔ´äżżéŇÁŐäÁčŕľŐ§ľÍĘÓËĂŃşăËéşĂÔˇŇĂ ËĂ×Íŕľ×čÍĹ´¤ÇŇÁŕ¤ĂŐ´·ŐčŕˇÔ´˘Ö鹡ѺşŇ§Í§¤ě»ĂСͺŔŇÂ㹡ĂÔ´ «Ö觼ŮéăŞé·Őčŕ˘éŇĂčÇÁ¨Đä´éĂŃşĘčǹŴ¤čŇăŞéľĹѧ§Ňąŕľ×čÍŕ»çąˇŇĂâąéÁąéŇÇăËéŕˇÔ´ˇŇĂŕ»ĹŐčÂąá»Ĺ§ľÄµÔˇĂÁˇŇĂăŞéäżżéŇ
ˇŇõͺʹͧ¤ÇŇÁµéͧˇŇèĐŕĂÔčÁ¨ŇˇÁŘÁÁͧˇŇĂăŞé§Ňą «Ö觢éÍÁŮĹşąˇŇäҴˇŇĂłě¨Đ¶ŮˇąÓÁŇăŞé»ĂĐŕÁÔąÁŇĂě¨Ôą¤ÇŇÁ¨ŘĘÓËĂŃşŞčǧŕÇĹҡŇĂăŞéľĹѧ§ŇąăąÍąŇ¤µ â´ÂˇŇĂŴŧ˘Í§ÁŇĂě¨Ôą¤ÇŇÁ¨ŘËĂ×ÍÁŇĂě¨Ôą·ŐčÁŐ¤čŇŕ»çąĹş ¨Đŕ»çąµÓáËąč§ŕĂÔčÁµéą˘Í§ˇŇĂľÔ¨ŇóҡŇõͺʹͧ¤ÇŇÁµéͧˇŇĂ «Ö觼Ůé´ŮáŤÇĂÁŐâ»ĂáˇĂÁ·ŐčËĹҡËĹŇÂŕľ×čÍăËéĘŇÁŇöŕĹ×͡ăŞéä´éµŇÁ¤ÇŇÁ¨Óŕ»çą·ŐčĽŃąá»Ăä»
ĂŮ»·Őč 21 ˇŇĂ»ĂĐŕÁÔąÁŇĂě¨Ôą¤ÇŇÁ¨Ř
ĂŮ»·Őč 22 áĘ´§â¤Ă§ĘĂéҧľ×éą°Ňą˘Í§ˇŇõͺʹͧ¤ÇŇÁµéͧˇŇĂ (DR) ·ŐčĂÇÁâÁ´ŮĹ·ŐčăŞé㹡ŇõѴĘԹ㨠ăąâÁ´ŮĹąŐéÍҨÁŐˇŇõԴµčÍĘ×čÍĘŇĂâ´ÂµĂ§ˇŃşĽŮéăŞé»ĹŇ·ҧ ËĂ×͵ŃÇá·ą·ŐčăËéşĂÔˇŇĂ«Öč§ÁŐËąéŇ·Őč¨Ń´ˇĹŘčÁ˘Í§ĽŮéăŞé»ĹŇ·ҧ (â´Â¨ĐľÔ¨ŇóҤÇŇÁµéͧˇŇĂĘčÇąąŐéŕ»çąŕľŐ§ 1 ¤ÇŇÁµéͧˇŇĂ) âÁ´ŮĹ DR ¨ĐµÔ´µčÍĽčŇąĂĐşş CIS (customer information system) ŕľ×čÍŕˇçş˘éÍÁŮŢͧĽŮéăŞé ąÍˇ¨ŇˇąŐéâÁ´ŮĹ DR ÂѧÁŐ¤ÇŇÁĘŇÁŇöĂͧĂŃşˇŇĂĂÇşĂÇÁ˘éÍÁŮŨҡÁÔŕµÍĂě MDMS ĽčŇą·Ň§ĂĐşş SCADA ä´éÍŐˇ´éÇÂ
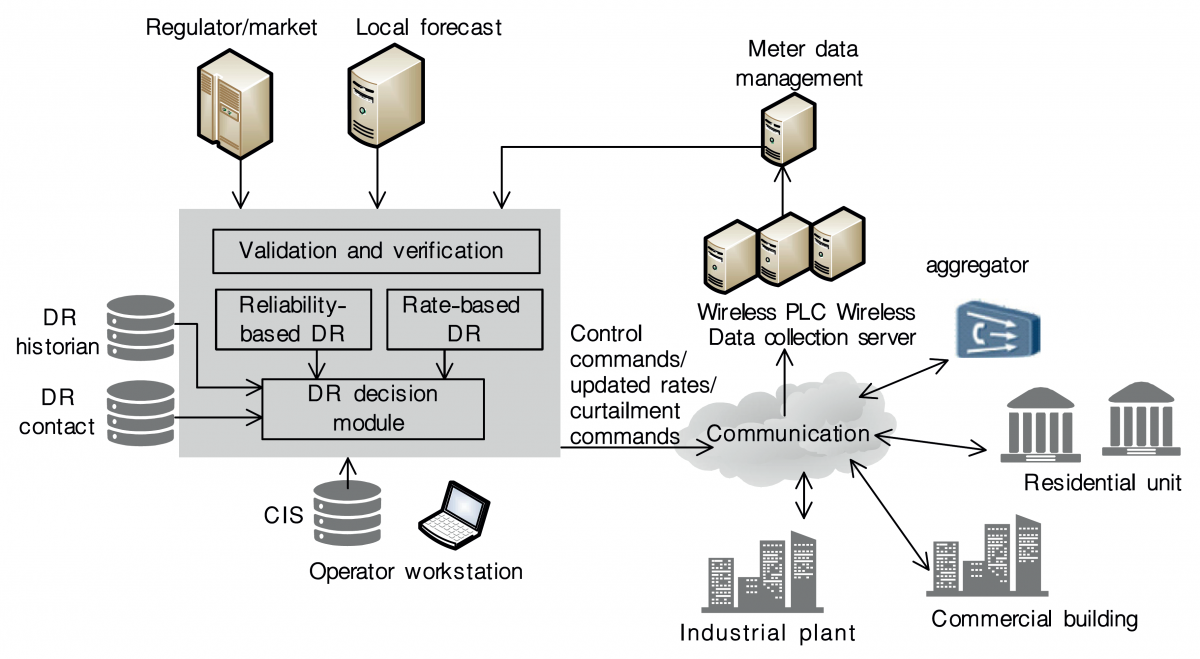
ĂŮ»·Őč 22 â¤Ă§ĘĂéҧľ×éą°Ňą˘Í§ˇŇõͺʹͧ¤ÇŇÁµéͧˇŇĂ
1.3.8 ĂĐşşľÔˇŃ´ĘŇÂä´ąŇÁÔˇ
㹡ŇĂÍ͡ẺĘŇÂĘ觺ąŕ§×č͹䢢ͧĘŔŇľÍҡŇČ·ŐčµŇµŃÇ ·ÓăËéĘŇÂĘč§ÁվԡѴľĹѧ§Ňą·ŐčăŞéŕ»çąáşşĘáµµÔˇ áĹĐÍҨĘ觼ĹăËéˇŇĂăŞéĘŇÂÁŐ¤ÇŇÁŕĘŐ觨ҡĘŔŇľáÇ´ĹéÍÁ·ŐčÁŐˇŇĂŕ»ĹŐčÂąá»Ĺ§¨ąŕˇÔ´¤ÇŇÁĂéÍąĘ٧ ËĂ×ÍŕˇÔ´ˇŇĂËÂčÍą˘Í§ĘŇ·ŐčÁҡŕˇÔąä» ĂĐşşľÔˇŃ´ĘŇÂä´ąŇÁÔˇ (dynamic line rating, DLR) ¨Ö§¶ŮˇľŃ˛ąŇ˘ÖéąÁŇŕľ×čÍŞčÇÂăËéĽŮé´ŮáĹĂĐşşĘŇÁŇö·ĂŇş»ĂÔÁŇł˘Í§ľĹѧ§Ňą·ŐčĘ觼čҹ仺ąĘŇÂĘ觷ŐčÁŐÍÂŮčáşş real-time şąŕ§×č͹䢢ͧĘŔŇľÍҡŇȨĂÔ§
ĽŮé´ŮáĹĘŇÁŇöăŞéĂĐşş DLR »ĂСͺˇŇĂľÔ¨ŇĂłŇŕľÔčÁ»ĂÔÁŇłľĹѧ§ŇąäżżéŇäÁčăËéŕˇÔąĂĐ´Ńş¤ÇŇÁ»ĹÍ´ŔŃ¢ͧľÔˇŃ´ľĹѧ§Ňąä´éÍÂčҧ䴹ŇÁÔˇ ĽŮé´ŮáĹĘŇÁŇö»ĂĐÂءµěăŞéĂĐşş DLR ăËéÁŐ»ĂĐĘÔ·¸ÔŔŇľÁҡ˘Öéą´éÇ¡ŇĂĂÇÁŕ˘éҡѺĂĐşş EMS áĹĐ SCADA ·ŐčÁŐÍÂŮč ŕľ×čÍăËéˇŇĂăŞé§ŇążŃ§ˇěŞŃąµčҧ ć ÁŐˇŇĂ´ÓŕąÔąˇŇĂä´éÍÂčҧÍѵâąÁŃµÔ ľĂéÍÁˇŃşˇŇĂáĘ´§»ĂÔÁŇłľÔˇŃ´ľĹѧ§ŇąăąĂٻẺ·Őčŕ˘éŇ㨧čŇÂăËéˇŃşÇÔČǡĂËĂ×ÍĽŮ黯Ժѵԧҹ·ŐčŕˇŐčÂǢéͧ
ĂŮ»·Őč 23 áĘ´§ˇŇĂÍ͡ẺĂĐşş´éÇ DLR «Ö觷ÓăËéä´éľÔˇŃ´¤ÇŇÁ¨ŘŕľÔčÁŕµÔÁ B ·ŐčÁҡˇÇčҡŇĂÍ͡ẺĘáµµÔˇµĂ§ĂĐ´Ńş A ŕÁ×čÍľÔ¨ŇóҨҡĘŔŇľÍҡŇČ ¨ĐľşÇčҡŇĂÍ͡Ẻ´éÇ DLR 㹪čǧ C ·ŐčĘŔŇľÍҡŇČŕÂçą ĹÁáç ÁŐŕÁ¦ÁҡąŃéą ¨Đä´éľÔˇŃ´¤ÇŇÁ¨Ř·ŐčĘ٧ŕÁ×čÍŕ»ĂŐÂşŕ·ŐÂşˇŃşăąŞčǧ D ·ŐčÍҡŇČĂéÍąáĹĐäÁčÁŐĹÁ
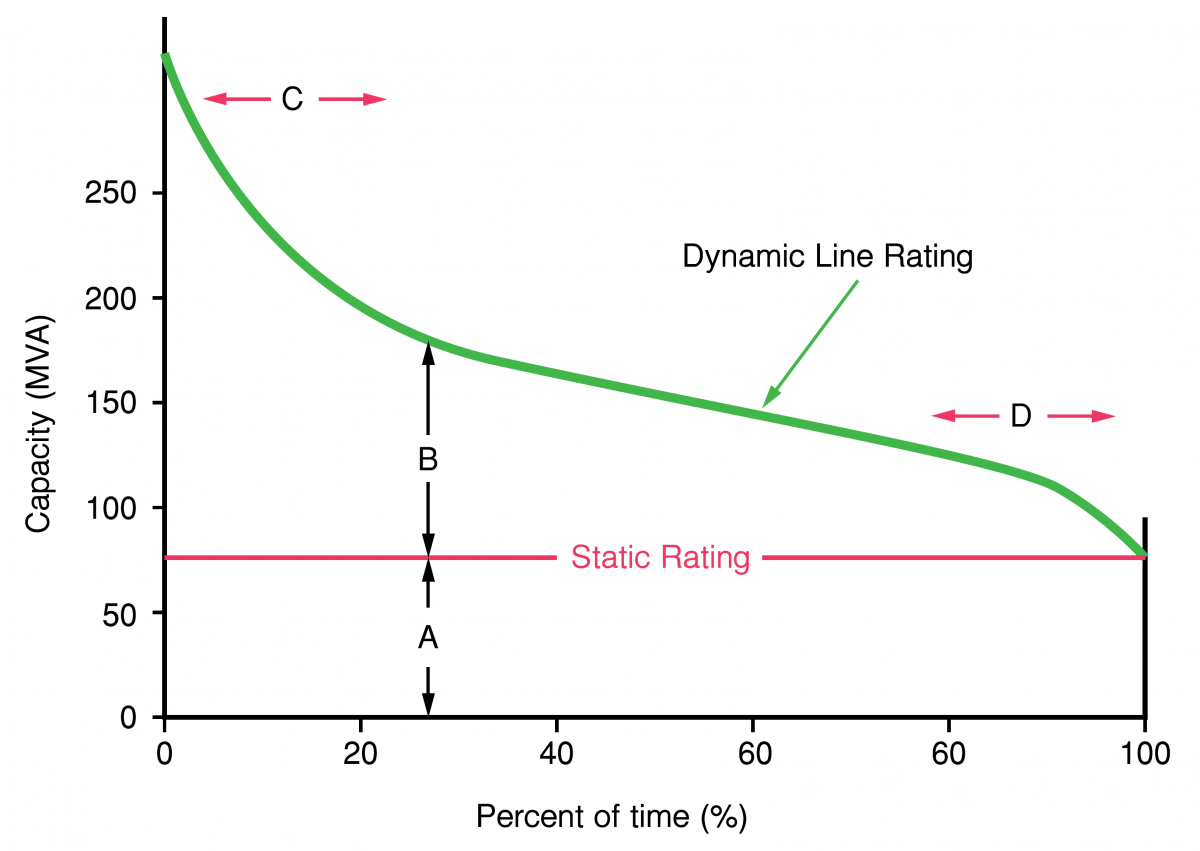
ĂŮ»·Őč 23 ¤ÇŇÁ¨Ř·ŐčŕľÔčÁ˘Ö鹨ҡˇŇĂÍ͡ẺĂĐşş´éÇ DLR
¨Ňˇâ¤Ă§ĘĂéҧľ×éą°ŇąĘÁŇĂě·ˇĂÔ´·Őč»ĂСͺ´éÇ ĂĐşşĘŇĂĘąŕ·ČáĹĐĂĐşş˘ŃéąĘ٧ «Ö觶١ąÓÁŇăŞé·Ó§ŇąĂčÇÁˇŃą´Ń§ˇĹčŇǢéҧµéą ¨ĐĘŇÁŇöĘĂŘ»ŕ»çąĂŇÂĹĐŕÍŐ´ĹѡÉТͧ෤âąâĹÂŐËĹѡáĹĐŕ·¤âąâĹÂŐŕĘĂÔÁ·ŐčăŞéˇŃşĂĐşşäżżéŇáĹĐĂĐşş¨čŇÂä´é´Ń§µŇĂҧ·Őč 3
µŇĂҧ·Őč 3 ŕ·¤âąâĹÂŐĘÁŇĂě·ˇĂÔ´·ŐčăŞéăąĂĐşşäżżéŇáĹĐĂĐşş¨čŇÂ
1.4 ˇŇĂĘ×čÍĘŇĂ
㹡ŇĂÍ͡Ẻâ¤Ă§ĘĂéҧľ×éą°Ňąŕľ×čÍăËéŕˇÔ´ˇŇõԴµčÍĂĐËÇčҧͧ¤ě»ĂСͺăąĘÁŇĂě·ˇĂÔ´ ä´éáˇč ĘčÇąˇŇĂĽĹÔµ ˇŇĂĘ觨čŇÂľĹѧ§Ňą ĽŮéăŞéäżżéŇáĹĐŕ¤Ă×͢čŇÂÍ×čą ŕŞčą ŕ¤Ă×͢čŇ·ŐčŕˇŐčÂǡѺşĂÔÉŃ· ŕ¤Ă×͢čŇ·ŐčăŞé㹡ŇèÓËąčŇÂľĹѧ§Ňą ˇŇĂäËŢͧ˘éÍÁŮĹĂĐËÇčҧ෤âąâĹÂŐµčҧ ć ÍÂčҧ·ŃčǶ֧¶×ÍÇčŇŕ»çąŕ§×čÍąä˘ĘÓ¤Ń
«Ö觤سĘÁşŃµÔ˘Í§ŕ¤Ă×͢čŇ¡ŇĂĘ×čÍĘŇĂ·ŐčăŞé¨ĐµéͧĂͧĂŃş ´Ń§ąŐé
ăąĘčÇąąŐé¨Đä´é͸ԺŇÂŕľÔčÁŕµÔÁŕˇŐčÂǡѺ żŃ§ˇěŞŃąĘÁŇĂě·ˇĂÔ´µŇÁ˘é͡ÓËą´ˇŇĂĘ×čÍĘŇĂ ŕ·¤âąâĹÂŐˇŇĂĘ×čÍĘŇĂĘÓËĂŃşĘÁŇĂě·ˇĂÔ´ ŕ¤Ă×͢čŇÂŔŇÂăąľ×éą·ŐčÍÂŮčÍŇČŃ áĹĐş·şŇ·˘Í§ŕ¤Ă×͢čŇÂäĂéĘŇÂ
1.4.1 żŃ§ˇěŞŃąĘÁŇĂě·ˇĂÔ´µŇÁ˘é͡ÓËą´ˇŇĂĘ×čÍĘŇĂ
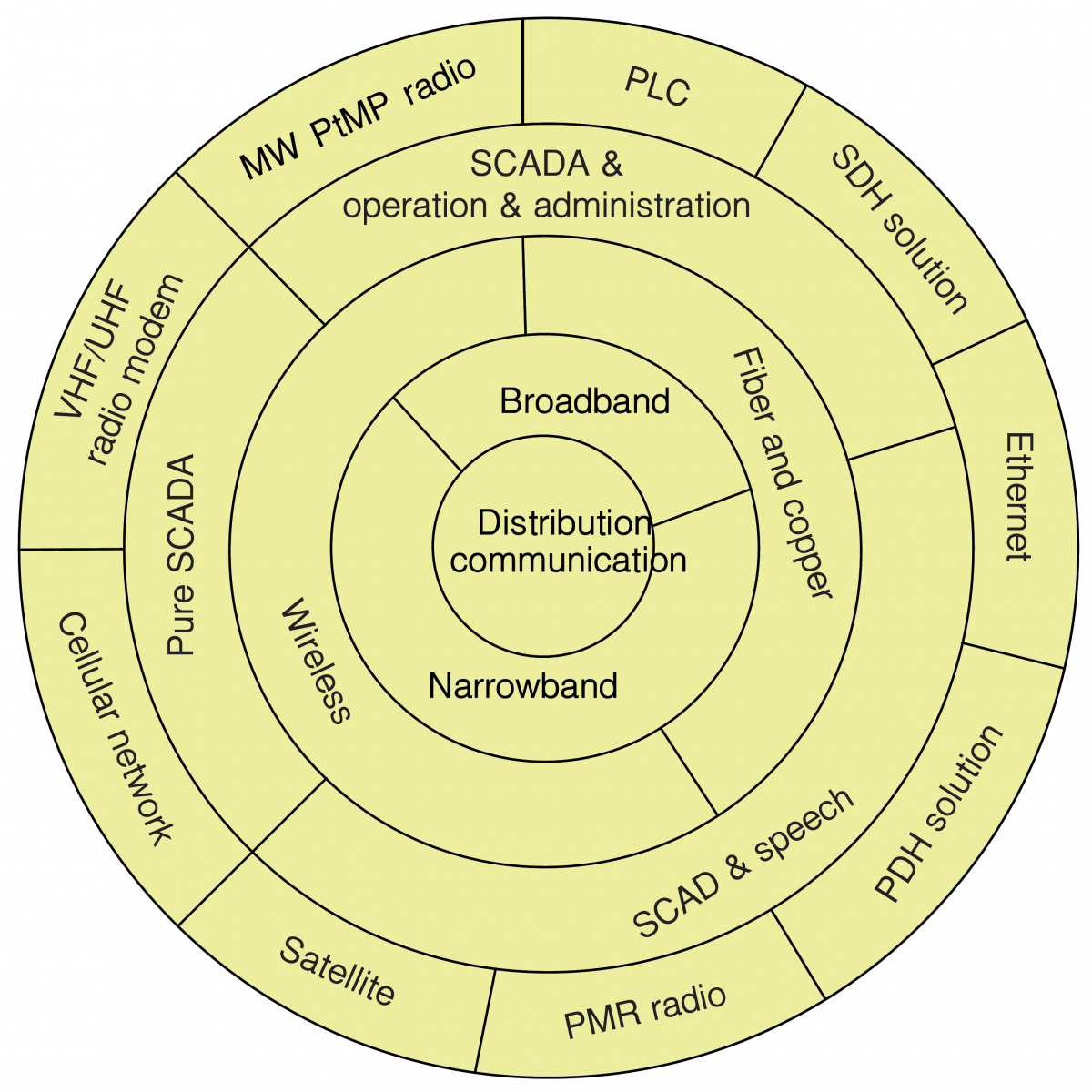
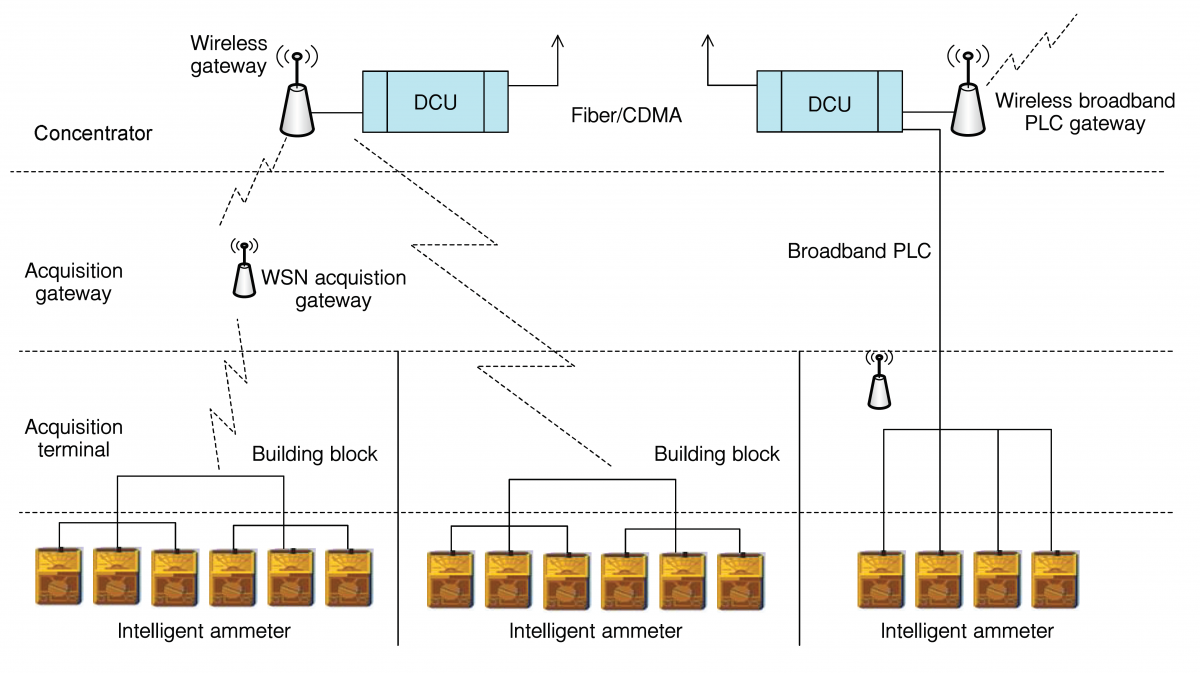
ľ×éą·ŐčˇŇ÷ӧҹ˘Í§ĘÁŇĂě·ˇĂÔ´ĘčÇąăËč¨ĐÍÂŮčăąĘčÇą˘Í§ĂĐşş¨čŇ·Őčáç´ŃąĂĐ´ŃşµčÓ (low voltage, LV) ¶Ö§ĂĐ´Ńş»ŇąˇĹҧ (medium voltage, MV) ĂŮ»·Őč 24 áĘ´§ÁŘÁÁͧ˘Í§ˇŇõԴµčÍĘ×čÍĘŇĂ «Ö觿ѧˇěŞŃąĘÁŇĂě·ˇĂÔ´¨ĐĘŇÁŇöáşč§Í͡ä´éŕ»çą 3 ŞŃéą µŇÁ˘é͡ÓËą´ˇŇĂĘ×čÍĘŇĂ ä´éáˇč
ĂŮ»·Őč 24 ˘é͡ÓËą´ˇŇĂĘ×čÍĘŇâͧĘÁŇĂě·ˇĂÔ´
1) ŕ¤Ă×͢čŇÂÍѵâąÁѵԡĂШŇ (distribution automation network, DA) ĘčÇąąŐé¨Đŕąéą¤Çş¤ŘÁˇŇĂ´ÓŕąÔąˇŇáĂÔ´ ä´éáˇč ˇŇõԴµŇÁˇĂĐáĘáĹĐáç´ŃąăąˇĂÔ´¨ÓËąčŇ ľĂéÍÁˇŃşˇŇĂĘ觤ÓĘŃč§ä»Âѧͧ¤ě»ĂСͺ·ŐčÍÂŮčäˇĹÍÍˇä» ŕŞčą ĘÇÔµŞě ËÁéÍá»Ĺ§ ŕÁ×čÍÁŐżÍĹ·ěŕˇÔ´˘Ö鹡ѺĂĐşş¨čŇ·Őčáç´ŃąĂĐ´Ńş»ŇąˇĹҧµĂ§ĘčÇąă´ ĘÇÔµŞě»éͧˇŃąˇç¨Đ·ÓËąéŇ·Őčá¡ĘčÇąąŃéąÍ͡ ŕĘ鹷ҧˇŇĂäËŢͧˇÓĹѧ俿éҨж١»ĂŃşŕ»ĹŐčÂąä»ÍÂčҧĂÇ´ŕĂçÇ ŕľ×čÍăËéŕˇÔ´¤ÇŇÁµčÍŕą×čͧ˘Í§ˇŇĂăËéşĂÔˇŇáѺľ×éą·Őčâ´ÂĂÇÁÁҡ·ŐčĘŘ´ ˇŇõŃ駤čŇĂĐÂĐäˇĹ·Őč¨Ń´ˇŇĂâ´ÂĽŮé´ŮáĹĂĐşşˇĂШŇ ËĂ×ͤÍÁľÔÇŕµÍĂě·ŐčʶҹŐäżżéŇÂčÍ ¨Ö§ŕ»çążŃ§ˇěŞŃąËĹѡ˘Í§ŕ¤Ă×͢čŇÂÍѵâąÁѵԡĂШŇÂ
ͧ¤ě»ĂСͺ·ŐčÍÂŮčäˇĹÍÍˇä» â´Â·ŃčÇ仨ĐÍÂŮčËčҧä»ËĹŇÂĘÔş¶Ö§ËĹŇÂĂéÍ¡ÔâĹŕÁµĂ ·ÓăËé¤čŇŕÇĹŇ latency ˘Í§ˇŇõԴµčÍĘ×čÍĘŇèĐÍÂŮč㹪čǧËĹѡĂéÍ millisecond ¨ą¶Ö§ËĹŇÂÇÔąŇ·Ő ´Ń§ąŃ鹼Ůé´ŮáĹĂĐşş¨Ö§¤Çäӹ֧¶Ö§żŃ§ˇěŞŃą·Őč´ÓŕąÔąˇŇĂşąĂĐÂзҧ˘Í§ŕĘ鹷ҧ»éͧˇŃą «Ö觵éͧˇŇáŇõԴµčÍĘ×čÍĘŇĂ·ŐčĂÇ´ŕĂçÇ ¤čŇŕÇĹŇ latency ·ŐčŕˇÔ´˘Ö鹨֧µéͧąéÍ¡ÇčҤčŇ·ŐčĂĐşŘäÇéăąŕ§×č͹䢢ͧĂĐşş
2) ˇŇäǺ¤ŘÁ¤ÇŇÁµéͧˇŇĂá͡·Őż (active demand control, AD) żŃ§ˇěŞŃą AD ¨Đ´ÓŕąÔąˇŇäǺ¤ŘÁáşşá͡·ŐżáĹШѴµŇĂҧˇŇ÷ӧҹăËéˇŃşáËĹ觡ÓŕąÔ´ˇĂШŇ áĹĐĘčÇąˇŃˇŕˇçşľĹѧ§ŇąăËéĘÍ´¤ĹéͧˇŃşĘŃŇł·Ň§´éŇą»ĂÔÁŇłáĹĐĂŇ¤Ň ŕľ×čÍŕľÔčÁ»ĂĐĘÔ·¸ÔŔŇľˇĂÔ´áĹĐËĹŐˇŕĹŐč§ŔŇÇĐâËĹ´ŕˇÔąĽčŇąˇŇĂ·ÓÍÍ»µÔäÁ«ě ˇŇèѴµŇĂҧˇŇ÷ӧҹ áĹСŇâ¨Ń´âËĹ´ â´ÂżŃ§ˇěŞŃąąŐé¨ĐÁŐ¤ÇŇÁäǵčͤčŇŕÇĹŇ latency äÁčÁҡŕËÁ×ÍąˇŃşŕ¤Ă×͢čŇÂÍѵâąÁѵԡĂШŇ «Ö觤čŇŕÇĹŇ latency ˘Í§ˇŇäǺ¤ŘÁ¤ÇŇÁµéͧˇŇĂá͡·Őż¨ĐÍÂŮčăąĂĐ´ŃşËĹŇ¹ҷŐ
3) ˇŇĂÍčŇąÁÔŕµÍĂě˘ŃéąĘ٧ (advanced meter reading, AMR) ŕ»çąˇŇĂÍčŇą¤čҡŇĂäËŢͧˇÓĹѧ·ŐčˇÓËą´ ľĂéÍÁˇŃşÁŐˇŇäӹdz˘éÍÁŮšŇĂŕĂŐ¡ŕˇçşŕ§Ôą «Ö觨йӢéÍÁŮŷҧŕÇĹŇáĹĐĂҤҵŇÁĘŃŇÁŇľÔ¨ŇĂłŇ â¤Ă§ĘĂéҧľ×éą°Ňą˘Í§ AMR ËĂ×Í AMI (AMR infrastructure) ¨ĐÁŐˇŇĂŕŞ×čÍÁµčÍä»ÂѧÁÔŕµÍĂě˘Í§ĽŮéăŞé§Ňą¨ÓąÇąÁҡ («Ö觺ҧľ×éą·ŐčÍҨÂҡµč͡ŇĂŕ˘éҶ֧ ˇç¨ĐµéͧÍ͡ẺĂĐşşĘ×čÍĘŇĂăąĹѡɳТͧˇŇĂĽĘÁµŃǡĹҧËĂ×͡ŇĂŕŞčŇăŞéǧ¨Ă) ŕľ×čÍąÓ˘éÍÁŮĹľĹѧ§ŇąĘĐĘÁ ËĂ×ÍâËĹ´â»ĂäżĹě·ŐčŕˇÔ´˘Ö鹨ĂÔ§Ę觡ĹŃşÁŇŕ»çąŞčǧŕÇĹŇ ŕŞčą ĂŇÂÇŃąËĂ×ÍĂŇÂŕ´×ÍąĘÓËĂŃşąÓÁҤӹdz¤čŇăŞé¨čŇÂ
1.4.2 ŕ·¤âąâĹÂŐˇŇĂĘ×čÍĘŇĂĘÓËĂŃşĘÁŇĂě·ˇĂÔ´
㹻Ѩ¨ŘşŃąŕ·¤âąâĹÂŐˇŇĂĘ×čÍĘŇĂ·ŐčĂͧĂŃşľ×éą·ŐčˇÇéҧÁŐăËéăŞéÍÂčҧËĹҡËĹŇ «Öč§ĘčÇąăËč¨ĐÁŐĹѡɳзŐčŕ»çąŕ¤Ă×͢čŇÂáşşäĂéĘŇ â´ÂşŇ§ˇĂłŐ¨Đŕ»çąˇŇĂĽĘÁˇŃşŕ¤Ă×͢čŇÂáşşăŞéĘŇ ŕľ×čÍăËéˇŇĂĂŃşĘ觢éÍÁŮĹĘŇÁŇö·Óä´é¨Ňˇµéą·Ň§ä»¶Ö§»ĹŇ·ҧÍÂčҧµčÍŕą×čͧ ĹѡɳзŐčĘӤѢͧ෤âąâĹÂŐˇŇĂĘ×čÍĘŇĂĘÓËĂŃşĘÁŇĂě·ˇĂÔ´¨ĐÁմѧąŐé
1) áşą´ěÇÔ´¸ěĘ٧
2) ŕ»çąˇŇĂĘ×čÍĘŇĂ´Ô¨ÔµÍĹ·ŐčĂͧĂŃşâ»ĂⵤÍĹ IP
3) ĂͧĂŃşˇŇĂŕ˘éŇĂËŃĘ ÁŐˇŇĂÂ׹ÂŃąµŃǵąˇčÍąŕ˘éҶ֧ŕ¤Ă×͢čŇÂ
4) ÁŐ¤ÇŇÁ»ĹÍ´ŔŃÂ㹡ŇõԴµčÍĘ×čÍĘŇĂ
5) ĂͧĂŃş QoS áĹĐ VoIP (Voice over Internet Protocol)
6) ĂͧĂŃşˇŇ÷ӧҹĂčÇÁˇŃąĂĐËÇčҧµčҧ෤âąâĹÂŐ ä´éáˇč
ŔŇÂăąĘ¶Ň»ŃµÂˇĂĂÁ˘Í§ĘÁŇĂě·ˇĂÔ´·ŐčÁŐĹѡɳĐŕ»Ô´áşş plug and play ·Ńé§ăąĘčÇą˘Í§ŕ«ąŕ«ÍĂě ÍŘ»ˇĂłě¤Çş¤ŘÁ ŕ«ÔĂěżŕÇÍĂě˘Í§ČŮąÂěĘŃ觡ŇĂ áĹĐĂĐşş»éͧˇŃą ¨ĐŞčÇÂăËéˇŇþѲąŇ˘Í§â¤Ă§˘čŇÂäżżéŇ·Óä´é§čŇ¢Öéą ŕ·¤âąâĹÂŐˇŇĂÇŃ´ µÔ´µŇÁ áĹФǺ¤ŘÁáşş real-time ·ŐčąÓÁŇăŞéˇŃşâ¤Ă§˘čŇÂäżżéҨĐÁŐş·şŇ·ĘӤѵč͡ŇþѲąŇä»ĘŮčˇŇĂŕ»çąĘÁŇĂě·ˇĂÔ´ «Ö觼Ůé´ŮáĹĂĐşş¨Óŕ»çąµéͧ¤ÓąÖ§¶Ö§Áҵðҹ¤ÇŇÁ»ĹÍ´ŔŃÂáĹСŇ÷ӧҹĂčÇÁˇŃą˘Í§áµčĹĐͧ¤ě»ĂСͺ â´Âŕ©ľŇĐĘčÇą·ŐčŕˇŐčÂǢéͧˇŃş˘éÍÁŮĹËĂ×͡ŇĂ´ÓŕąÔąˇŇĂ·ŐčĘÓ¤Ń
ŕ·¤âąâĹÂŐˇŇĂĘ×čÍĘŇĂáşşăŞéĘŇÂáĹĐáşşäĂéĘŇ·ŐčĘŇÁŇöąÓÁŇ»ĂĐÂءµěăŞéˇŃşĘÁŇĂě·ˇĂÔ´¨Đ»ĂСͺ´éÇÂ
1) MPLS (Multiprotocol label switching): ŕ»çąŕ¤Ă×͢čŇÂĘ×čÍĘŇäسŔŇľĘ٧ĘÓËĂŃşˇŇĂĂŃşĘ觷ĂŇżżÔˇ˘éÍÁŮĹĂĐËÇčҧâËą´ŕ¤Ă×͢čŇÂ
2) LAN/WAN ŕ»çąÇÔ¸ŐˇŇõԴµčÍĘ×čÍĘŇĂ·Őč¶ŮˇąÓÁŇăŞéˇŃşˇŇĂĂŃşĘ觢éÍÁŮĹŔŇÂăąŕ¤Ă×͢čŇ¢ͧáËĹ觼ĹÔµ ʶҹŐÂčÍ áĹĐĘÇÔµŞě â´ÂÍŇČѤÇŇÁąčŇŕŞ×čͶ×ͧ͢â»ĂⵤÍĹ TCP/IP ąÍˇ¨ŇˇąŐé ˇŇĂăŞé LAN/WAN şąŕĘéąăąáˇéÇąÓáʧ ŕľ×čÍŕŞ×čÍÁµčÍÍÔĹÔŕÁąµěµčҧć ÂѧŞčÇÂŕľÔčÁ¤ÇŇÁŕĂçÇăËéˇŃşŕ¤Ă×͢čŇ ˘¨Ń´»ŃËҡŇĂŕ˘éŇÁŇá·»ĘŃŇł áĹĐÁŐ¤ÇŇÁŕËÁŇĐĘÁˇŃşˇŇĂąÓÁŇăŞéăąĘ¶ŇąŐäżżéŇŕ»çąÍÂčҧÁҡ ŕą×čͧ¨ŇˇÁŐ¤ÇŇÁ·ą·ŇąµčÍĘŃҳúˇÇą¤ÇŇÁ¶ŐčÇÔ·ÂŘáĹФĹ×čąáÁčŕËĹçˇäżżéŇ Ĺ´»ŃËŇĘŃҳúˇÇą·ŐčŕˇÔ´¨ŇˇĹŮ»˘Í§ˇĂŇÇ´ě
3) ŕ¤Ă×͢čŇÂĂĐşşâ·ĂČŃľ·ěŕ¤Ĺ×čÍą·Őč ąÍˇ¨ŇˇąÓÁŇăŞéˇŃşˇŇĂŕŞ×čÍÁ⧻ˇµÔáĹéÇ ÂѧĘŇÁŇöąÓÁŇăŞéˇŃşĘ¶ŇąˇŇĂłě©Řˇŕ©Ôąä´éÍŐˇ´éÇ ·Ń駷Őčŕ»çąˇŇĂ´ÓŕąÔąˇŇáѺ·ĂŃľÂҡà áĹСŇäǺ¤ŘÁĘŃ觡ŇĂ ÍÂčҧäáçµŇÁ ˇŇĂĘ×čÍĘŇĂşąŕ¤Ă×͢čŇÂĂĐşşâ·ĂČŃľ·ěŕ¤Ĺ×čÍą·ŐčÍҨÁŐŕÇĹŇĹčŇŞéŇ㹡ŇĂĘ×čÍĘŇâéÍÁŮĹÍÂŮčşéҧ ĽŮé´ŮáĹŕ¤Ă×͢čҨ֧¨Óŕ»çąµéͧµĂǨĘÍş¤ŘłĘÁşŃµÔ˘Í§ˇŇĂĂŃşĘ觡Ѻ˘é͡ÓËą´˘Í§ˇŇõԴµčÍĘ×čÍĘŇáčÍąąÓÁŇăŞé§Ňą¨ĂÔ§
4) WiMAX (Worldwide interoperability for microwave access) ŕ»çąŕ·¤âąâĹÂŐˇŇĂĘ×čÍĘŇĂáşşäĂéĘŇÂĘÓËĂŃşĘ×čÍĘŃŇł˘éÍÁŮŨҡ¨Ř´ä»ÂѧËĹҨش «Ö觼Ůé´ŮáĹĂĐşşĘŇÁŇöąÓÁŇăŞéŕ»çąâ¤Ă§˘čŇÂľ×éą°Ňą ŕľ×čÍĘĂéҧŕ»çąŕ¤Ă×͢čŇÂäĂéĘŇ LAN/WAN ĘÓËĂŃşˇŇĂşĂÔËŇèѴˇŇĂĘŃŇłˇŇäǺ¤ŘÁä´é
5) Wi-Fi ŕ»çąˇŇĂášŕ»ĹŐčÂą˘éÍÁŮĹËĂ×͡ŇĂŕŞ×čÍÁµčÍÍÔąŕ·ÍĂěŕąçµáşşäĂéĘŇÂâ´ÂăŞé¤Ĺ×čąÇÔ·ÂŘ
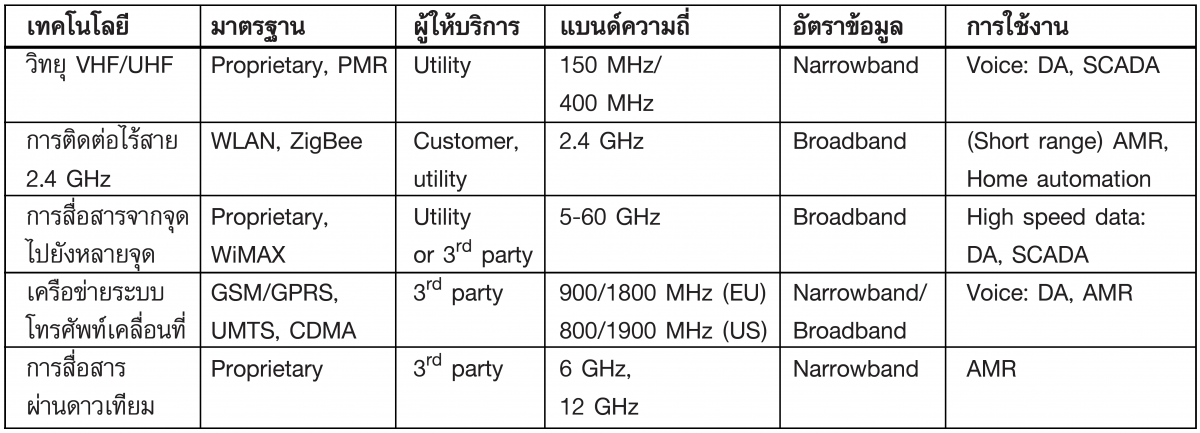
ĘÓËĂŃşĂŇÂĹĐŕÍŐ´˘Í§ŕ·¤âąâĹÂŐˇŇõԴµčÍĘ×čÍĘŇĂáĹСŇĂ»ĂĐÂءµěăŞé§ŇąˇŃşĘÁŇĂě·ˇĂÔ´¨ĐĘĂŘ»ÍÂŮčăąµŇĂҧ·Őč 4
µŇĂҧ·Őč 4 ŕ·¤âąâĹÂŐˇŇõԴµčÍĘ×čÍĘŇĂáĹСŇĂăŞé§ŇąˇŃşĘÁŇĂě·ˇĂÔ´
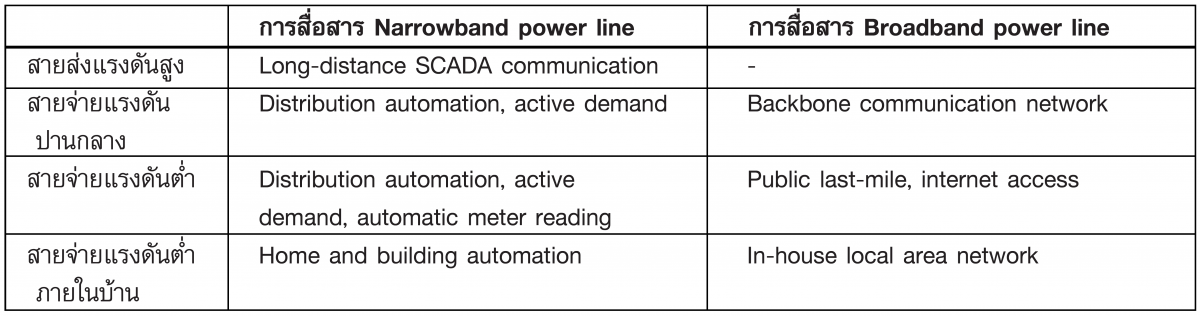
ąÍˇ¨Ňˇŕ·¤âąâĹÂŐˇŇõԴµčÍĘ×čÍĘŇĂ·ŐčÁŐăËéăŞé´Ń§ˇĹčŇÇáĹéÇ ˇçÂѧÁŐµŃǡĹҧˇŇõԴµčÍĘ×čÍĘŇĂŕ©ľŇĐĘÓËĂŃşĂĐşşäżżéҡç¤×͡ŇĂăŞéŕ¤Ă×͢čŇÂĘҨčŇ¡ÓĹѧŕľ×č͡ŇõԴµčÍĘ×čÍĘŇĂ ËĂ×Í PLC (power line communication) ´Ń§µŇĂҧ·Őč 5
µŇĂҧ·Őč 5 ˇŇõԴµčÍĘ×čÍĘŇĂĽčŇąŕ¤Ă×͢čŇÂĘҨčŇ¡ÓĹѧ俿éŇ
˘éÍĘѧࡵ
1) ĘčÇą˘Í§¤ÓĘŃ觷ŐčăŞéĂŐŕĹÂě»éͧˇŃąĘŇÁŇöĘ觼čŇąĘŇÂäż´éÇ BPL ä´é ŕľ×čÍŕ»çą·Ň§ŕĹ×͡¨ŇˇˇŇĂĘ×čÍĘŇĂşąâ¤Ă§˘čŇÂÍ×čą ˇŇĂ·Őč BPL ¶ŮˇąÓÁŇăŞéˇŃş¤ÓĘŃ觢ͧĂŐŕĹÂě»éͧˇŃą ŕą×čͧÁҨҡŕ»çąµŃǡĹҧ·ŐčÁŐŕʶŐÂĂŔŇľĘ٧ ŕľĂŇĐÍÂŮčăąĂĐşşĘ觵Ńé§áµčáç´Ńą»ŇąˇĹҧ¨ą¶Ö§áç´ŃąĘ٧
2) ˇŇĂąÓ PLC ä»»ĂĐÂءµěăŞéˇŃşˇŇĂăËéşĂÔˇŇĂşĂÍ´áşą´ěşąĘŇÂäżżéŇ (broadband over power line, BPL) ăąĹѡɳТͧ෤âąâĹÂŐÍÔąŕ·ÍĂěŕąµ·ŐčăËé¤ÇŇÁŕĂçÇĂĐ´Ńş Mbps ¨ĐÂѧ¤§ÁŐ˘éͨӡѴ㹴éŇą˘Í§ĂĐÂзҧáĹФسĘÁşŃµÔµŃÇąÓ Ę觼ĹăËéĽŮéÍ͡ẺäÁčÍҨąÓŕ·¤âąâĹÂŐąŐéÁŇăŞéˇŃşˇŇĂăŞé§Ňą˘Í§ĘÁŇĂě·ˇĂÔ´ä´éÍÂčҧ¤ĂÍş¤ĹŘÁ·ŘˇˇŇĂŕŞ×čÍÁâ§
ĂŮ»·Őč 25 áĘ´§ˇŇèѺ¤Ůč˘Í§ŕ·¤âąâĹÂŐˇŇõԴµčÍĘ×čÍĘŇáѺˇŇĂăŞé§ŇąşąĘÁŇĂě·ˇĂÔ´ â´ÂľÔ¨ŇóҨҡ˘é͡ÓËą´˘Í§áşą´ěÇÔ´¸ěáĹеŃǡĹҧ 㹡óշŐčµéͧˇŇĂáşą´ěÇÔ´¸ěäÁčĘ٧Áҡ ˇŇĂăŞéâÁŕ´çÁÇÔ·Âءç¨Đŕ»çą·Ň§ŕĹ×͡·ŐčąčŇʹ㨠ŕą×čͧ¨ŇˇÁŐ¤čŇăŞé¨čҵčÓ ËĂ×Í㹡óշŐčăŞéŕ¤Ă×ÍĂĐşşâ·ĂČŃľ·ěŕ¤Ĺ×čÍą·Őčˇç¨ĐŞčÇÂăËéˇŇ÷ӧҹ§čŇ¢ÖéąáĹĐ»ĂĐËÂŃ´¤čŇăŞé¨čŇÂ㹡ŇõԴµŃé§
ĂŮ»·Őč 25 ·Ň§ŕĹ×͡˘Í§ˇŇĂĘ×čÍĘŇĂĘÓËĂŃşĂĐşş¨čŇÂ
ĘÓËĂŃşŕ§×čÍąä˘ăąˇŇĂŕĹ×͡ĂĐşşˇŇõԴµčÍĘ×čÍĘŇĂĘÓËĂŃşĘÁŇĂě·ˇĂÔ´·Őč¤ÇĂľÔ¨ŇóҨĐÁմѧąŐé
1) ¤ÇŇÁľĂéÍÁ˘Í§µŃǡĹҧˇŇõԴµčÍĘ×čÍĘŇĂ ŕŞčą ÁŐĘŇ·ͧᴧ ËĂ×ÍŕĘéąăÂáˇéÇąÓáʧÇčҧŕľŐ§ľÍăËéăŞéËĂ×ÍäÁč
2) ¤ÇŇÁľĂéÍÁ˘Í§ĘÔč§ÍӹǤÇŇÁĘдǡ·ŐčµŃǡĹҧµéͧăŞé ŕŞčą ·čÍĂéÍÂĘŇ ËĂ×ÍŕĘŇĘč§ăąˇĂłŐ˘Í§ĂĐşşäÁâ¤ĂŕÇż
3) ¤ŘłĘÁşŃµÔ˘Í§ĂĐşşĘ×čÍĘŇĂĘÓËĂŃşâËą´ËĂ×͡ŇĂŕŞ×čÍÁ⧷ŐčˇÓËą´ ŕŞčą áşą´ěÇÔ´¸ě ¤čŇŕÇĹŇ latency
4) ¤ÇŇÁľĂéÍÁáĹФÇŇÁąčŇŕŞ×čͶ×ͧ͢ĂĐşşĘ×čÍĘŇĂ·ŐčĘÍ´¤ĹéͧˇŃş¤ÇŇÁĘӤѢͧĂٻẺĘŃŇł
5) ¤čŇăŞé¨čŇÂ㹡ŇĂŧ·Řą·Ń駤čŇăŞé¨čŇ CAPEX áĹĐ OPEX
6) ˇŇĂÂÍÁĂŃşáĹФÇŇÁŕËÁŇĐĘÁ˘Í§ˇŇĂăŞéŕ·¤âąâĹÂŐăąÍąŇ¤µ
ˇŇĂÍ͡Ẻŕ¤Ă×͢čŇ¡ŇõԴµčÍĘ×čÍĘŇèĐÍéҧÍÔ§µŇÁÁҵðҹĂĐËÇčҧ»ĂĐŕ·Č «Öč§ÁŐ 2 ÁҵðҹĘӤѷŐč¶ŮˇŕĹ×͡ÁŇăŞéˇŃşĘÁŇĂě·ˇĂÔ´ â´ÂáµčĹĐĘčÇą¨Đ»ĂСͺ´éÇÂŕą×éÍËҢͧµŃÇÁҵðҹŕͧˇŃşÁҵðҹ·ŐčŕˇŐčÂǢéͧ Áҵðҹáá¤×Í IEC 61850 ŕ»çąÁҵðҹ·ŐčŕĂÔčÁµéąľŃ˛ąŇĘÓËĂѺʶҹŐäżżéŇ áµč㹻Ѩ¨ŘşŃąä´éÁŐˇŇþѲąŇăËé¤ĂÍş¤ĹŘÁˇŇĂăËéşĂÔˇŇĂ·ŐčˇÇéҧ˘ÖéąŕŞčą áËĹ觷ĂŃľÂҡþĹѧ§ŇąˇĂШŇ ËĂ×Í DER (distributed energy resources) áşş¨ÓĹͧ˘éÍÁŮĹăąÁҵðҹ IEC 61850 ¨ĐÍÂŮčşąËĹѡˇŇâͧâËą´Ĺͨԡ¤ÍĹ «Öč§â¤Ă§ĘĂéҧ˘éÍÁŮŨж١¨Ń´ăËé·Ó§Ňą»ĂĐĘŇąˇŃşáşş¨ÓĹͧ˘éÍÁŮĹ·ŐčŕĂŐ¡ÇčŇ CIM (common information model) ăąÁҵðҹ IEC 61970 ·Őč¶ŮˇľŃ˛ąŇ˘ÖéąÁŇĘÓËĂŃşăŞéˇŃşČŮąÂě¤Çş¤ŘÁ «Öč§ŕÁ×čÍľÔ¨ŇóһĂСͺˇŃşÁҵðҹÍ×čą ˇç¨Đ·ÓăËéä´éŞŘ´Áҵðҹ«Ö觤ĂÍş¤ĹŘÁˇÔ¨ˇĂĂÁµčҧ ć ·ŐčŕˇÔ´˘Ö鹡ѺĂĐşşäżżéŇÍÂčҧ¤Ăş¶éÇą ·Ńé§ŔŇľĂÇÁ˘Í§ˇĂкǹˇŇĂŔŇÂăąĂĐşşäżżéŇáĹĐͧ¤ě»ĂСͺ·ŐčŕˇŐčÂǢéͧµčҧ ć
1.4.3 ŕ¤Ă×͢čŇÂŔŇÂăąľ×éą·ŐčÍÂŮčÍŇČŃÂ
ŕ¤Ă×͢čŇÂŔŇÂăąľ×éą·ŐčÍÂŮčÍŇČŃÂËĂ×Í HAN (home area network) ¨Đ»ĂСͺ´éÇ¡ŇĂŕŞ×čÍÁâ§ä»ÂѧĂĐşşÂčÍ áĹĐÍŘ»ˇĂłěŕ¤Ă×čͧăŞéäżżéҵčҧ ć ŔŇÂăąşéŇą ŕŞčą ŕ¤Ă×čͧ»ĂŃşÍҡŇČ ÇÔ´ŐâÍŕˇÁĘě ĂĐşşĂѡÉҤÇŇÁ»ĹÍ´ŔŃ ŕľ×čÍʹѺʹعˇŇĂşĂÔËŇĂÍŘ»ˇĂłěáĹФčŇăŞé¨čŇ¢ͧĽŮéăŞéäżżéŇăËéÁŐ»ĂĐĘÔ·¸ÔŔŇľÁҡ˘Öéą ŕ¤Ă×͢čŇ HAN ¨ĐŕŞ×čÍÁµčÍâ´ÂµĂ§ËĂ×ÍŕŞ×čÍÁ⧼čŇąµŃǡĹҧŕŞčą ŕ¤Ă×͢čŇÂäĂéĘŇ ŕ˘éҡѺˇĂÔ´ĽčŇą·Ň§ĘÁŇĂě·ÁÔŕµÍĂě â´Â㹡ŇĂŕŞ×čÍÁµčͨеéͧÁŐˇŇĂ»éͧˇŃąˇŇĂĂŃşĘ觢éÍÁŮĹŕľ×čÍăËéä´é˘éÍÁŮĹÍÂčҧ¤Ăş¶éÇąáĹĐŕ»çąáşş real-time
¨ŇˇˇŇĂ·Őčŕ¤Ă×͢čŇ HAN ÁŐáąÇâąéÁŕµÔşâµŕľÔčÁ˘Öéą ·ÓăËéâ͡ŇĘ·ŐčĂĐşşĂÇÁ¶Ö§ÍŘ»ˇĂłě˘Í§ŕ¤Ă×͢čҨж١â¨ÁµŐˇçÁŐÁҡµŇÁä»´éÇ ŕą×čͧ¨ŇˇÍŘ»ˇĂłě HAN ĘčÇąăËčÍÂŮčąÍˇŕËą×ͨҡˇŇäǺ¤ŘÁ˘Í§ĽŮé´ŮáĹĂĐşş 㹡óբͧˇŇĂâ¨ÁµŐÍŘ»ˇĂłě·ŐčµčÍĂčÇÁˇŃąµĂ§ËÁéÍá»Ĺ§ŔŇÂăąľ×éą·Őčŕ´ŐÂǡѹ ÂčÍÁĘ觼šĂĐ·şăąÇ§¨ÓˇŃ´ ŕÁ×čÍŕ»ĂŐÂşŕ·ŐÂşˇŃşˇŇĂâ¨ÁµŐľĂéÍÁˇŃąËĹŇÂľ×éą·Őč´éÇÂäÇĂŃĘËĂ×ÍÁŃĹáÇĂě ´Ń§ąŃéą ¨Ö§ŕ»çąĘÔ觨Óŕ»çą·Őč¨ĐµéͧąÓ¨Ř´ÍÔąŕµÍĂěŕżĘŕľ×č͡ŇĂĘ×čÍĘŇâͧ şéŇąľŃˇÍŇČŃ ÍҤŇĂĘӹѡ§Ňą âç§ŇąÍصĘŇˡĂĂÁ ·ŐčµčÍŕ˘éҡѺˇĂÔ´ÁŇĽčŇąˇŇäǺ¤ŘÁáĹеĂǨĘÍşÂ׹ÂŃąĘÔ·¸ÔěˇčÍąŕ˘éҶ֧ÍŘ»ˇĂłě˘Í§ĂĐşşäżżéŇ
ĂŮ»·Őč 26 áĘ´§µŃÇÍÂčҧŕ¤Ă×͢čŇ HAN ·ŐčÁŐˇŇõԴµčÍĘ×čÍĘŇĂ´éÇ AMI «Öč§ÁŐĹѡɳĐŕ»çąˇŇĂĘ×čÍĘŇĂĘͧ·Ň§áşş real-time ¨ŇˇĘÁŇĂě·ÁÔŕµÍĂěˇŃşÍŘ»ˇĂłěŔŇÂăąşéŇą ŕŞčą ŕ·ÍĂěâÁĘáµ·ÍѨ©ĂÔÂĐ ¨ÍáĘ´§ĽĹ ĘÇÔµŞě·ŐčăŞé㹡ŇäǺ¤ŘÁâËĹ´
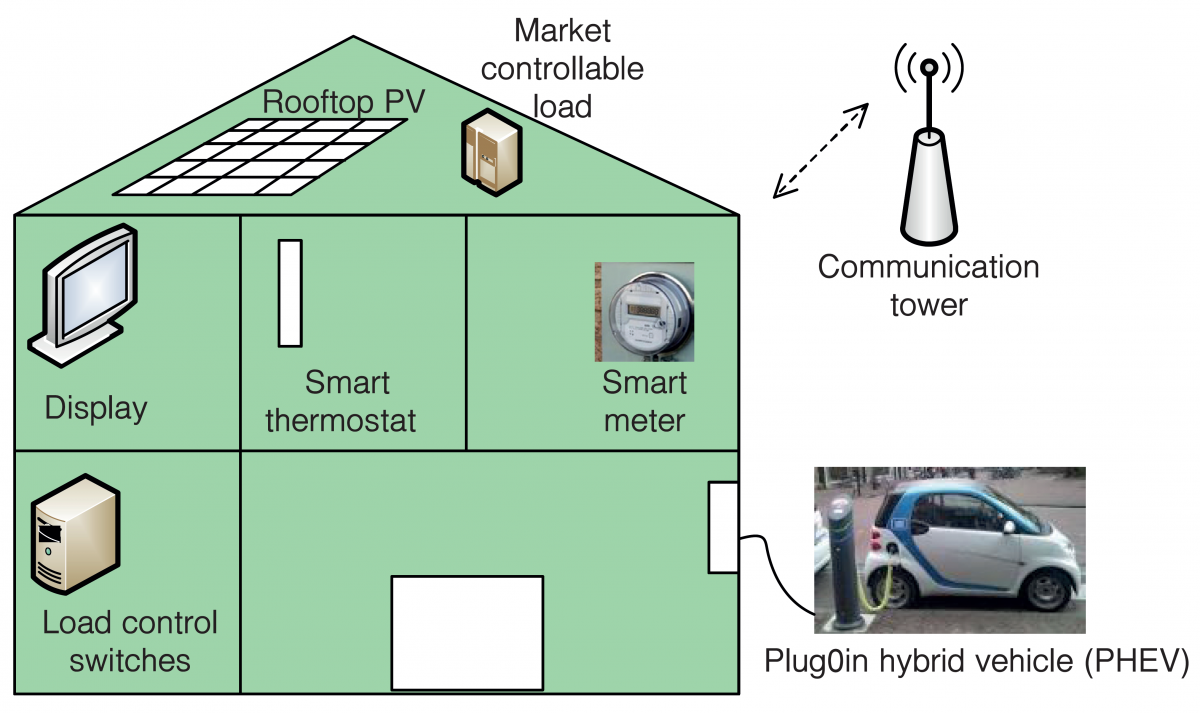
ĂŮ»·Őč 26 áĘ´§µŃÇÍÂčҧŕ¤Ă×͢čŇ HAN
1.4.4 ş·şŇ·˘Í§ŕ¤Ă×͢čŇÂäĂéĘŇÂ
1) ˇŇõԴµŇÁáşş online ĘÓËĂŃşĂĐşşĘŇÂĘč§
㹡ŇĂ´ÓŕąÔąˇŇĂĂĐşşĘŇÂĘ觨ĐÁŐˇŇ÷ӧҹŕˇŐčÂǡѺŕ§×č͹䢢ͧŕʶŐÂĂŔŇľËĹŇÂĘčÇą ä´éáˇč ˇŇõԴµŇÁÍѵâąÁŃµÔ ˇŇäǺ¤ŘÁáĹСŇĂ»éͧˇŃąÍŘ»ˇĂłě â´ÂĂĐşş¨ĐÁŐˇŇĂĘč§ĘŃŇłá¨é§ŕµ×Íą·Ńą·ŐŕÁ×čÍŕˇÔ´ÍغѵÔŕËµŘ ŕŞčą ¨ŇˇĹÁ ˝ą żéŇĽčŇ ËĂ×Í»ĂҡŻˇŇĂłě¸ĂĂÁŞŇµÔµčҧć Ę觼ĹăËéĽŮé´ŮáĹĘŇÁŇöá¡ĘčÇą·ŐčŕˇÔ´şˇľĂčͧÍ͡ä´éÍÂčҧĂÇ´ŕĂçÇ ·ÓăËéşĂÔˇŇĂä´éĂŃşĽĹˇĂĐ·şăąşĂÔŕÇł·Őč¨ÓˇŃ´
ĽŮéÍ͡ẺĘčÇąăËč¨ĐŕĹ×͡ăŞéŕ¤Ă×͢čŇÂĘ×čÍĘŇĂäĂéĘŇÂÁŇĂŃşĘ觢éÍÁŮĹăËéˇŃşÍÔĹÔŕÁąµěµčҧ ć ŔŇÂăąĘÁŇĂě·ˇĂÔ´ ŕą×čͧ¨Ňˇ¶éŇŕ»çąˇŇĂĘ×čÍĘŇĂĽčŇąĘŇ ¨ĐäÁčĘдǡ´éÇÂŕ§×čÍąä˘ËĹŇ»ĂСŇĂŕŞčą ÍŘ»ĘĂä¨ŇˇˇŇþҴĘŇÂĘŃŇł ¤ÇŇÁĘŇÁŇö㹡ŇäĂÍş¤ĹŘÁľ×éą·ŐčăËéşĂÔˇŇĂÁըӡѴ ˇŇĂĂкصÓá˹觢ͧŕ˵ءŇĂłě·Óä´éŞéҡÇčŇŕ¤Ă×͢čŇÂĘ×čÍĘŇĂäĂéĘŇ ·ÓăËéŕÇĹŇż×éąµŃǢͧĂĐşşÂŇǹҹ Ę觼šĂĐ·şˇŃş¤ÇŇÁąčŇŕŞ×čͶ×ͧ͢â¤Ă§˘čŇÂ
ˇŇõԴµŇÁĂĐşşĘŇÂĘč§ online áşş real-time ąÍˇ¨ŇˇŞčÇ»éͧˇŃąáĹĐĹ´ŕ˵ŘŕĘŐ·ŐčÍҨŕˇÔ´˘Ö鹡ѺĂĐşşäżżéŇáĹéÇ ÂѧăËé˘éÍÁŮĹ·Őčŕ»çą»ĂĐâÂŞąěµč͡ŇĂąÓÁŇ»ĂŃş»Ăا»ĂĐĘÔ·¸ÔŔŇľáĹФÇŇÁ¨Ř˘Í§ĘŇÂÍÂčҧ䴹ŇÁÔˇ ĘÓËĂѺʶһѵ¡ĂĂÁ·ŃčÇ仢ͧĂĐşşµÔ´µŇÁĘŇÂĘč§áşş online şąŕ¤Ă×͢čŇÂĘ×čÍĘŇĂäĂéĘҨĐáĘ´§´Ń§ĂŮ»·Őč 27
ĂŮ»·Őč 27 µŃÇÍÂčҧʶһѵ¡ĂĂÁ˘Í§ĂĐşşµÔ´µŇÁĘŇÂĘč§áşş online
2) ĂĐşşˇŇĂá¨é§ŕµ×ÍąáĹеԴµŇÁÍѨ©ĂÔÂĐĘÓËĂѺʶҹŐäżżéŇÂčÍÂ
¨ŇˇˇŇĂ·Őčŕ·¤âąâĹÂŐÍѵâąÁѵԢͧʶҹŐäżżéŇÂčÍÂä´é¶ŮˇľŃ˛ąŇ˘ÖéąÁҵŇÁ·ŐčÁҵðҹˇÓËą´ ·ÓăËéʶҹŐäżżéŇÂčÍÂĘčÇąăËč·ŐčĘĂéҧ˘ÖéąÁŇăËÁčä´éĂŃşˇŇõԴµŃé§ĂĐşş´Ń§ˇĹčŇÇÍÂčҧ¤Ăş¶éÇą «Ö觨ĐÁŐĂٻẺ˘éÍÁŮŢͧĂĐşşáĹĐÍŘ»ˇĂłěäżżéŇÍѨ©ĂÔÂеčҧ ć ŕ»çąáşş´Ô¨ÔµÍĹ ŕÁ×čÍąÓ˘éÍÁŮĹŕËĹčŇąŐéĂÇÁŕ˘éҡѺĘÁŇĂě·ˇĂÔ´ ¨ĐŕˇÔ´ˇŇĂášŕ»ĹŐčÂą˘éÍÁŮŢčŇÇĘŇĂŕľ×č͡Ň÷ӧҹĂčÇÁˇŃą ąÍˇŕËą×ͨҡˇŇĂĘč§ä»ÂѧČŮąÂě¤Çş¤ŘÁŕľ×čÍ·ÓˇŇĂ»ĂĐÁÇĹĽĹáĹеѴĘԹ㨠Ę觼ĹăËéŕˇÔ´ˇŇĂ»ĂŃş»ĂاĂٻẺˇŇĂşĂÔËŇèѴˇŇĂʶҹŐäżżéŇăą´éŇąµčҧ ć ÍÂčҧŕ»çąĂĐşşŕŞčą ˇŇõԴµŇÁÍŘłËŔŮÁÔşąÍŘ»ˇĂłě ˇŇõԴµŇÁˇĂĐáĘĂŃčÇşąˇŃş´ŃˇżéŇĽčŇ ˇŇõԴµŇÁˇŇĂĂŃčÇäËŢͧ©ąÇąŕŞčąˇęŇ« SF6 ˇŇõԴµŇÁˇŇĂ»éͧˇŃąˇŇââÁ¢éÍÁŮĹ
˘éÍĘѧࡵ ĂٻẺ˘éÍÁŮĹ·Őčä´é¨ŇˇÁÔŕµÍĂěÍѨ©ĂÔÂеčҧ ć ¨ĐĘÍ´¤ĹéͧˇŃş˘é͡ÓËą´ăąÁҵðҹŕŞčą ˘é͡ÓËą´ “Device Language Message Specification” ËĂ×Í DLMS áĹĐ “Companion Specification for Energy Metering” ËĂ×Í COSEM ăąÁҵðҹ IEC 62056
ĂŮ»·Őč 28 ʶһѵ¡ĂĂÁˇŇõԴµŇÁʶҹСŇ÷ӧҹ˘Í§ÍŘ»ˇĂłě
3) ĂĐşşˇŇĂá¨é§ŕµ×ÍąáĹеԴµŇÁáşş online ĘÓËĂŃşŕ¤Ă×͢čŇÂĘҨčŇÂ
ŕ¤Ă×͢čŇÂĘҨčŇÂŕ»çąĘčǹ˹Ö觢ͧĂĐşşäżżéҡÓĹѧ·ŐčŕŞ×čÍÁµčÍä»ÂѧĽŮéăŞé ŕľ×č͡ĂШŇÂľĹѧ§ŇąäżżéŇ´éÇÂĂĐ´Ńşáç´Ńą·ŐčŕËÁŇĐĘÁˇŃşˇŇĂăŞé§Ňą»ĹŇ·ҧ ¤ÇŇÁąčŇŕŞ×čͶ×ÍáĹФسŔŇľ˘Í§ŕ¤Ă×͢čŇÂĘҨčҨ֧ÁŐ¤ÇŇÁĘӤѵčͤسĘÁşŃµÔâ´ÂĂÇÁ˘Í§ĂĐşşäżżéŇ ŕ¤Ă×͢čŇÂĘҨčŇ»ĂСͺ´éÇÂÍŘ»ˇĂłěľ×éą°Ňąä´éáˇč ĘŇ feeder ËÁéÍá»Ĺ§´éŇąĘҨčŇ ŕ«ÍĂěˇÔµŕşĂˇŕˇÍĂě ĘÇÔµŞě áĹĐÍŘ»ˇĂłěŕ©ľŇĐŕŞčą ĂŐŕĹÂě»éͧˇŃą ÍŘ»ˇĂłěÍѵâąÁѵԵčҧ ć ÍŘ»ˇĂłě¤Çş¤ŘÁ ÍŘ»ˇĂłěĘ×čÍĘŇĂ ÁÔŕµÍĂěáĹĐŕ¤Ă×čͧÁ×ÍÇŃ´
¨ŇˇˇŇĂ·Őčŕ¤Ă×͢čŇÂĘҨčŇÂÁŐĹѡɳСĂШŇÂÍÂŮčŕ»çą¨ÓąÇąÁҡ¤ĂÍş¤ĹŘÁľ×éą·ŐčăËéşĂÔˇŇĂ ·ÓăËéˇŇĂąÓŕ¤Ă×͢čŇÂĘ×čÍĘŇĂäĂéĘŇÂÁŇăŞéʹѺʹعˇŇĂ»éͧˇŃąáĹСŇâÂŇÂŕ¤Ă×͢čŇÂÁŐ˘éÍ´Ő ´Ń§ąŐé
˘éÍĘѧࡵ ˇŇĂŕŞ×čÍÁµčÍÍŘ»ˇĂłěŕ·ÍĂěÁÔąÍŢͧ˝Ń觼ŮéăËéşĂÔˇŇáѺૹŕ«ÍĂě˘Í§˝Ń觼ŮéăŞéäżżéŇĽčŇą·Ň§ŕ¤Ă×͢čŇÂäĂéĘŇ ¨Đ·ÓăËéĽŮé´ŮáĹä´éŔŇľˇŇõͺʹͧ·Őč¤Ăş¶éÇą áÁéăąĘŔŇľáÇ´ĹéÍÁˇŇ÷ӧҹ·Őč«Ńş«éÍą ˇŇĂÇÔŕ¤ĂŇĐËě˘éÍÁŮĹ·ŐčĂÇşĂÇÁÁŇä´éŕľ×č͡ÓËą´ŕ»çąáąÇ·Ň§ăËéĽŮéăŞéäżżéŇ»ĂŃşŕ»ĹŐčÂąľÄµÔˇĂĂÁ¨ĐĘŇÁŇöşĂĂĹŘŕ§×č͹䢵čҧ ć ä´é§čŇ¢Öéą ŕŞčą ˇŇĂĹ´µéą·Řą˘Í§ľĹѧ§Ňą ˇŇĂ»ĂŃş»Ăا»ĂĐĘÔ·¸ÔŔŇľáĹФÇŇÁąčŇŕŞ×čͶ×Í ĘÓËĂѺʶһѵ¡ĂĂÁĂĐşş˘Í§ˇŇĂä´éÁŇ«Ö觢éÍÁŮĹŕˇŐčÂǡѺˇŇĂăŞéľĹѧ§ŇąäżżéŇşąŕ¤Ă×͢čŇÂäĂéĘҨĐáĘ´§´Ń§ĂŮ»·Őč 29
ĂŮ»·Őč 29 ʶһѵ¡ĂĂÁĂĐşş˘Í§ˇŇĂä´é˘éÍÁŮĹŕˇŐčÂǡѺˇŇĂăŞéäżżéŇşąŕ¤Ă×͢čŇÂäĂéĘŇÂ
ĂŮ»·Őč 30 áĘ´§ÁŘÁÁͧĂĐşşĘŇĂĘąŕ·Č˘Í§ĘÁŇĂě·ˇĂÔ´ ·ŐčÍŇČŃ¡ŇĂŕŞ×čÍÁµčÍľčǧૹŕ«ÍĂěŕ˘éҡѺÍŘ»ˇĂłě ŕľ×čÍĂÇşĂÇÁ˘éÍÁŮŨҡĘčÇąµčҧ ć ä»ÂѧĽŮé´ŮáĹ ˘éÍÁŮĹ·Ńé§ËÁ´¨Đ¶ŮˇąÓÁŇăŞé»ĂСͺˇŇõѴĘԹ㨻ĂѺʶҹĐăą´éŇąµčҧ ć ˘Í§ĂĐşşĽčŇąˇŇõŃ駤čҢͧÍŘ»ˇĂłě µŃÇÍÂčҧáËĹ觢éÍÁŮĹáµčĹĐĘčÇą ¨ĐÁŐĂŇÂĹĐŕÍŐ´´Ń§ąŐé
1) ˝Ń觡ŇĂĽĹÔµˇÓĹѧ俿éŇ
2) ˝Ńč§Ę觨čŇÂäżżéŇ
3) ˝Ń觼ŮéăŞéäżżéŇ
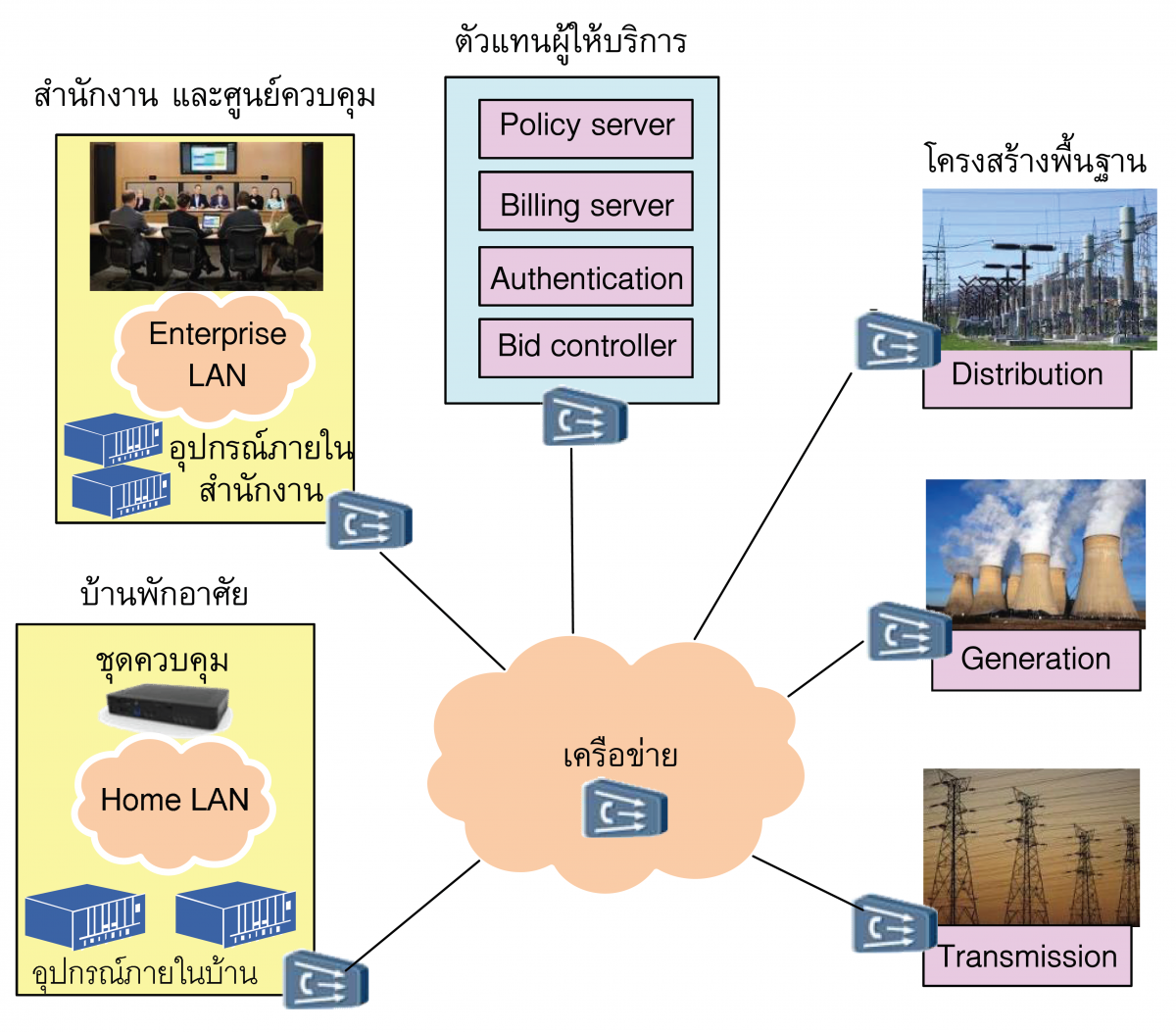
ĂŮ»·Őč 30 ÁŘÁÁͧĂĐşşĘŇĂĘąŕ·Č˘Í§ĘÁŇĂě·ˇĂÔ´
áÁéÇčҢéÍÁŮŵčҧ ć ·Őčä´éĂŃş¨ŇˇĂĐşşĘŇĂĘąŕ·Č˘Í§ĘÁŇĂě·ˇĂÔ´ ¨Đ·ÓăËéĂĐşşäżżéŇÁŐ¤ÇŇÁĘŇÁŇö´ÓŕąÔąˇŇĂä´éËĹҡËĹŇÂşąáąÇ¤Ô´˘Í§ˇŇ÷ӧҹÍѵâąÁѵÔâ´ÂˇŇĂăŞéÍŘ»ˇĂłěáĹĐĂĐşşÍѨ©ĂÔÂĐąŃéą ĽŮé´ŮášçÂѧ¤§µéͧ¤ÓąÖ§¶Ö§ŕʶŐÂĂŔŇľ˘Í§ĂĐşşäżżéҤǺ¤Ůčä»´éÇ «Ö觵ŃÇÍÂčҧ˘Í§ÍŘ»ˇĂłěáĹĐĂĐşş·ŐčĘŇÁŇöąÓÁŇăŞé´Ń§ˇĹčŇÇáĹéÇ ŕŞčą ÍŘ»ˇĂłěÇŃ´ PMU (phasor measurement unit) ŞŘ´ DTCR (dynamic thermal circuit rating) ĂĐşş FACTS (flexible AC transmission systems)
ăąĘčÇąąŐé¨Đŕ»çąˇŇĂÇÔŕ¤ĂŇĐËěĹѡɳТͧĘÁŇĂě·ˇĂÔ´·Őč¨Óŕ»çąµč͡ŇĂÇҧἹ ŕľ×čÍăËéĘŇÁŇöµÍşĘąÍ§żŃ§ˇěŞŃąˇŇĂăŞé§Ňą ˝Ń觡ŇĂĽĹÔµˇÓĹѧ俿éŇ ˝Ńč§Ęč§äżżéŇ ˝Ń觨čŇÂäżżéŇ ˝Ń觨ÓËąčŇÂáĹĐĽŮéăŞéäżżéŇ
˝Ń觡ŇĂĽĹÔµˇÓĹѧ俿éŇ
1. ˇŇäǺ¤ŘÁáĹШčŇÂâËĹ´ 㹡óբͧĂĐşşäżżéҡÓĹѧ·ŐčäÁčăŞčĂĐşşÍŘ´Á¤µÔ ˇŇĂĘŮŕĘŐ¡ÓĹѧ俿éŇăąĂٻẺµčҧ ć ÂčÍÁŕˇÔ´˘Öéąä´éˇŃş·ŘˇĘčÇą ˇŇĂÇҧἹ¤Çş¤ŘÁˇŇĂĽĹÔµăËéˇŃşâç俿éŇăąáµčĹĐŞčǧŕÇĹŇáĹСŇèčŇÂâËĹ´´éÇÂËĹѡˇŇĂĘÁ´ŘšÓĹѧ´Ń§ˇĹčŇÇ仢éҧµéą ¨Ö§ąŃşŕ»çąŕ§×čÍąä˘ĘÓ¤Ń ŕľĂŇШĐĘ觼ŵč͵鹷عˇŇĂĽĹÔµâ´ÂĂÇÁ·Ńé§ĂĐşş
ĘÁŇĂě·ˇĂÔ´ä´éŕ˘éŇÁŇÁŐş·şŇ·ăąˇŇĂŞčÇÂÇҧἹˇŇĂĽĹÔµăËéĘÍ´¤ĹéͧˇŃş¤ÇŇÁµéͧˇŇĂăŞéäżżéŇ ŔŇÂăµéŕ§×č͹䢢ͧĂĐşşáĹĐŞčǧŕÇĹŇăŞé§Ňą·ŐčÁյ鹷عµčÓĘŘ´ ˇŇĂăŞéâ¤Ă§˘čŇ¡ŇĂĘ×čÍĘŇĂÍѨ©ĂÔÂШЪčÇÂăËéˇŇĂ´ÓŕąÔą§Ňą˘Í§˝Ń觼ŮéĽĹÔµˇŃş˝Ń觼ŮéăŞéÂѧ¤§ŕ»çąáşş real-time áÁéÇčҨĐŕ»çąŞčǧ·ŐčŕˇÔ´żÍĹ·ě
2. ˇŇĂ»ĂŃşâËĹ´ ŕ»çąÇÔ¸ŐĹ´¤ÇŇÁ¨Ř·ŐčµéͧĘÓĂͧŕµĂŐÂÁäÇé㹪čǧ¤ÇŇÁµéͧˇŇĂăŞé§ŇąĘ٧ĘŘ´ «Ö觡ŇĂşĂÔËŇĂ·ŐčŕˇŐčÂǢéͧâ´ÂµĂ§ˇŃşˇŇĂăŞéäżżéŇĂĐËÇčҧâ¤Ă§ĘĂéҧľ×éą°ŇąÁÔŕµÍĂě˘ŃéąĘ٧ (AMI) ĂĐşş˘éÍÁŮĹĹ١¤éŇ (consumer information system, CIS) áĹпѧˇěŞŃąˇŇĂĽĹÔµ ĽčŇąâ¤Ă§˘čŇ¡ŇĂĘ×čÍĘŇĂÍѨ©ĂÔÂĐŔŇÂăąĘÁŇĂě·ˇĂÔ´ ¨ĐŞčÇÂăËéˇŇĂ»ĂĐŕÁÔą¤ÇŇÁµéͧˇŇĂăŞéäżżéŇÁŐ¤ÇŇÁ¶ŮˇµéͧáÁčąÂÓ Ĺ´ˇŇĂĽĹÔµĘčÇąŕˇÔąĹ§
3. ˇŇĂĘĂéҧˇÓĹѧ俿éŇ´éÇÂľĹѧ§Ňą·´á·ąáşşˇĂШŇÂăąĘÁŇĂě·ˇĂÔ´ «Öč§ĂÇÁäÁâ¤ĂˇĂÔ´·ŐčÁŇľĂéÍÁˇŃşËąčÇ¡ŇĂĽĹԵ㹾×éą·ŐčăˇĹéŕ¤Ő§ˇŃşĽŮéăŞéäżżéŇ ¨ĐŞčÇÂăËéˇŇĂ»ĂŃşĘÁ´ŘšÓĹѧ㹡óշŐčÁŐˇŇûԴĂĐşşşŇ§ĘčÇąĘŇÁŇö·Óä´é
4. ˇŇĂşÓĂاĂѡÉŇÍŘ»ˇĂłěĽĹÔµľĹѧ§ŇąäżżéŇ ¨Đ·ÓăËé¨ÓąÇąáĹСŇáĂШҵŃǢͧżÍĹ·ěŴŧ â´ÂăąĘÁŇĂě·ˇĂÔ´¨ĐÁŐˇŇĂşĂÔËŇĂͧ¤ě»ĂСͺµčҧ ć ·ŐčĘÍ´¤ĹéͧˇŃşŕ§×č͹䢡ŇĂşÓĂاĂѡÉŇÍŘ»ˇĂłěŕŞÔ§»éͧˇŃą (preventive maintenance) «Öč§ŕ»çąáĽąˇŇĂ´ŮáščÍąŕˇÔ´ŕ˵ŘŕĘŐ â´Â¨ĐÁŐˇŇõĂǨĘÍş´ŮáĹáĹĐ·Ó¤ÇŇÁĘĐÍŇ´ŕ¤Ă×čͧŕ»çąĂĐÂĐ ÁŐˇŇĂŕ»ĹŐčÂąÍŘ»ˇĂłěËĂ×Íǧ¨Ă·Őč¤ĂşÍŇÂءŇĂăŞé§ŇąµŇÁĂĐÂĐŕÇĹŇ·ŐčˇÓËą´ «Ö觡ŇĂ´ÓŕąÔąˇŇĂąŐéąÍˇ¨Ňˇŕ»çąˇŇĂ»éͧˇŃąáĹéÇ ÂѧŞčÇÂăËéĂĐşşĘŇÁŇöŕ˘éҶ֧˘éÍÁŮĹăËÁč·ŐčÍÂŮčăąŕ«ąŕ«ÍĂěä´éÍŐˇ´éÇ â´Âŕ©ľŇТéÍÁŮŨҡŕ·ÍĂěäşąěËĂ×Íŕ¤Ă×čͧˇŃ§ËŃąŞąÔ´ăşľŃ´ËÁŘą «Ö觨ж١Ęč§ä»ÂѧČŮąÂě¤Çş¤ŘÁˇŇĂĽĹÔµŕľ×č͵ԴµŇÁăËéÍŘ»ˇĂłě·Ó§Ňąŕ»çąä»µŇÁŕ§×č͹䢷ŐčˇÓËą´
˝Ńč§Ęč§äżżéŇ
5. ˇŇäǺ¤ŘÁáĹеԴµŇÁˇĂÔ´ ´éÇÂĂĐşşşĂÔËŇĂľĹѧ§ŇąáĹĐĂĐşş SCADA ˘Í§ĂĐşşĘč§äżżéŇ ¨Đŕ»çąˇŇäǺ¤ŘÁ µĂǨĘÍşáĹĐÇÔŕ¤ĂŇĐËě˘éÍÁŮšŇ÷ӧҹẺ real-time ąÍˇ¨ŇˇąŐéĂĐşş SCADA ÂѧÍҨ·ÓËąéŇ·Őč»ĂĐÁÇżŢéÍÁŮĹ·Őčä´é¨ŇˇÎŇĂě´áÇĂěµčҧ ć áĹéÇąÓÁŇáĘ´§Ľčҹ˹éŇ¨Í ËĂ×ÍĘč§ĘŃҳ令Ǻ¤ŘÁÎŇĂě´áÇĂě «Ö觡ŇĂ´ÓŕąÔąˇŇĂąŐé¨Óŕ»çąµéͧÁտѧˇěŞŃą¨Ń´ˇŇâéÍÁŮĹ·ŐčĘÓ¤Ń ä´éáˇč
µŃÇÍÂčҧŕŞčą ˇŇĂşĂÔËŇĂáç´ŃąĂĐşş¨ĐÍŇČŃ¡ŇäǺ¤ŘÁµŃÇ»ĂŃşá·» ŕľ×čÍŕľÔčÁáç´ŃąŕÁ×čÍŕˇÔ´áç´ŃąµˇËĂ×Íŕľ×čÍăËéËÁéÍá»Ĺ§ăŞé§Ňąä´éˇŃşáËĹ觨čŇÂäż·ŐčäÁčŕʶŐÂĂ
˘éÍĘѧࡵ 㹡óբͧˇŇäǺ¤ŘÁ VAR ăąĂĐşşĘŇÂĘ觨ĐăŞéŞŘ´˘Í§µŃÇŕˇçş»ĂШŘĂŐá͡ŕµÍĂě ËĂ×ÍăŞéËÁéÍá»Ĺ§áşş OLTC áĹĐ ULTC ĘčÇąăąĂĐşş¨ÓËąčҨĐŕąéąˇŇĂăŞéŞŘ´˘Í§µŃÇŕˇçş»ĂШŘŕ»çąËĹѡËĂ×ÍăŞéˇŇĂ»ĂŃşá·»˘Í§ËÁéÍá»Ĺ§·ŐčĘ¶ŇąŐ «Öč§ăąĘÁŇĂě·ˇĂÔ´ˇŇĂ´ÓŕąÔąˇŇĂŕËĹčŇąŐéĘŇÁŇö·Óä´éáşşÍѵâąÁŃµÔ ´éÇ¡ŇĂĘŃ觧ҹ¨ŇˇČŮąÂě¤Çş¤ŘÁ ĂÇÁ¶Ö§ÍҨÁŐˇŇĂąÓ IVVC (integration volt/VAR control) ËĂ×Í AVVC (advanced volt/VAR control) ŕ˘éŇÁŇăŞéʹѺʹعˇŇĂşĂÔËŇĂăËéˇŃşĂĐşş¨ÓËąčŇÂä´éÍŐˇ´éÇÂ
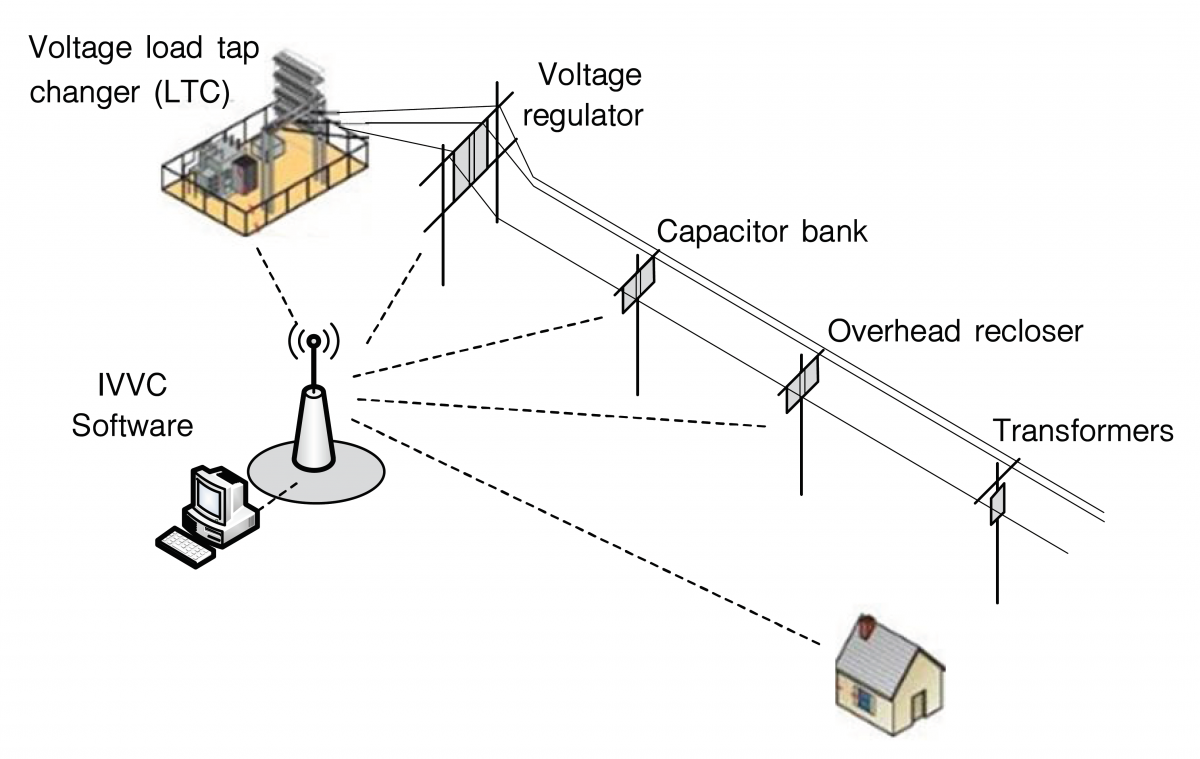
ĂŮ»·Őč 31 ˇŇĂăŞé IVVC 㹡ŇĂşĂÔËŇĂĂĐşş¨ÓËąčŇÂ
6. ˇŇĂ´ŮáĹĂѡÉŇČŮąÂě¤Çş¤ŘÁĂĐşşĘč§äżżéŇ ăąĘÁŇĂě·ˇĂÔ´¨ĐˇÓËą´ăËéˇŇĂ´ÓŕąÔąˇŇõŃé§áµčˇŇĂ»éͧˇŃą ˇŇõĂǨ¨Ńş ˇŇĂá¡ áĹĐáˇé䢿ÍĹ·ě·Ńé§ËÁ´¶Ůˇ·ÓÍÂčҧÍѵâąÁŃµÔ â´ÂˇŇõԴµčÍĘ×čÍĘŇĂĂĐËÇčҧČŮąÂě¤Çş¤ŘÁ ˇŃş ĂĐşşĘ觨čŇÂäżżéŇ ĂÇÁ¶Ö§áËĹ觼ĹÔµ¨Đŕ»çąáşş real-time ·ŐčÁŇľĂéÍÁˇŃşŕ·¤âąâĹÂŐˇŇĂĂѡÉҤÇŇÁ»ĹÍ´ŔŃÂ
7. ˇŇĂ´ŮáĹĂѡÉŇÍŘ»ˇĂłěĂĐşşĘč§äżżéŇ ·Őč»ĂСͺ´éÇ ŕşĂˇŕˇÍĂě ĂŐŕĹÂě ĘÇÔµŞě ËÁéÍá»Ĺ§ áĹĐŕáŮŕĹŕµÍĂě ăąĘÁŇĂě·ˇĂÔ´¨ĐşĂÔËŇèѴˇŇĂÍŘ»ˇĂłě´Ń§ˇĹčŇǵŇÁŕ§×č͹䢡ŇĂşÓĂاĂѡÉŇŕŞÔ§»éͧˇŃą â´Â˘éÍÁŮŨҡÍŘ»ˇĂłě¨Đµéͧ¶ŮˇĘ觼čŇąä»ÂѧČŮąÂě¤Çş¤ŘÁŕľ×č͵ԴµŇÁˇŇ÷ӧҹ
˝Ń觨čŇÂäżżéŇ
8. ˇŇäǺ¤ŘÁáç´Ńą feeder áĹСŇĂ·ÓĘÁ´ŘĹŕżĘ 㹡ŇäǺ¤ŘÁáç´Ńą˘Í§ĂĐşş¨čŇÂ俨зÓŕľ×čÍ»éͧˇŃą»ŃËҡĂĐáĘŕˇÔą áĹĐĂѡÉŇĘÁ´ŘĹŕżĘ «Ö觨ĐÁŐˇŇĂ»ĂŃşŕ»ĹŐč¹仵ŇÁ¤ÇŇÁµéͧˇŇĂâËĹ´˘Í§ĽŮéăŞé ŕą×čͧ¨ŇˇăąĘÁŇĂě·ˇĂÔ´ÁŐˇŇĂşĂÔËŇäÇŇÁµéͧˇŇ÷ҧ´éŇąĽŮéăŞé ¨Ö§·ÓăËéÁŐ˘éÍÁŮĹâËĹ´ÁŇăŞéˇŃşˇŇĂ·ÓĘÁ´ŘĹŕżĘ áĹĐŕÁ×čÍĂÇÁ˘éÍÁŮŨҡĂĐşşĘ觨čŇÂäżżéҡѺáËĹ觼ĹÔµ ˇç¨ĐÂÔ觪čÇÂăËéˇŇäǺ¤ŘÁáç´Ńąŕ»çąä»ÍÂčҧÁŐ»ĂĐĘÔ·¸ÔŔŇľ
˘éÍĘѧࡵ㹡ŇĂ´ÓŕąÔąˇŇĂÍѵâąÁѵԨĐÍŇČŃ¡ŇĂĘ×čÍĘŇĂĂĐËÇčҧĂĐşşşĂÔËŇĂĘčÇą¨čŇÂäżżéҡѺÍŘ»ˇĂłě ĂčÇÁˇŃşâ»ĂⵤÍĹ ŕŞčą Distributed Network Protocol 3 (DNP3)
9. ˇŇõԴµŇÁŕ˵ŘŕĘŐ ˇŇĂÇÔŕ¤ĂŇĐËěăşá¨é§ŕ˵ŘŕĘŐÂľĂéÍÁˇŃşˇŇĂáˇé䢻ŃËŇ ¨ĐŞčÇÂăËéĹ١¤éŇÁŐ¤ÇŇÁľÍă¨ŕľÔčÁ˘Öéą â´ÂĘÁŇĂě·ˇĂÔ´¨ĐÁŐˇŇĂá¨é§ŕµ×ÍąÍѵâąÁŃµÔ ŕÁ×čÍÁŐ»ŃËŇäżżéŇ´Ńş ·ÓăËéˇŇĂż×éąµŃÇĘŇÁŇö·Óä´éÍÂčҧĂÇ´ŕĂçÇ
10. ˇŇĂĘÇÔµŞěµŇÁἹ áĹСŇĂĘÇÔµŞěŕĂ觴čÇąŕľ×čÍáˇé䢿ÍĹ·ě·ŐčʶҹŐäżżéŇÂčÍÂáĹĐ·ŐčĘŇ feeder ŔŇÂËĹѧ¨ŇˇĂĐşşµĂǨľş»ŃËŇ ¨Đ¶Ůˇ¨Ń´ˇŇĂÍÂčҧÍѵâąÁŃµÔ â´ÂăąĘÁŇĂě·ˇĂÔ´¨ĐÁŐˇŇèѴĹÓ´Ńş˘Í§ˇŇĂĘÇÔµŞěµŇÁ¤ÇŇÁŕËÁŇĐĘÁ
11. ˇŇĂ´ŮáĹ»ĂŃş»Ăا¤ŘłŔŇľˇÓĹѧ俿éŇ «Öč§ÁŐŕ§×čÍąä˘ĘӤѤ×͡ŇĂĂѡÉŇĂĐ´Ńşáç´ŃąăËéÁŐ¤ÇŇÁ¶Ůˇµéͧ·ŃčÇ·Ńé§ĂĐşş¨čŇ ăąĘÁŇĂě·ˇĂÔ´¨ĐĘŇÁŇö·Óä´éÍÂčҧĂÇ´ŕĂçÇ ŕą×čͧ¨ŇˇÁŐˇŇĂăŞé˘éÍÁŮŨҡËÁéÍá»Ĺ§áĹĐÁÍŕµÍĂě·Őčŕ»çąĘŇŕËµŘ â´ÂˇŇĂĂŃşĘ觢éÍÁŮŨзӼčŇąˇŇĂĘ×čÍĘŇĂáşş real-time ĂĐËÇčҧÍŘ»ˇĂłěˇŃşĂĐşşÇÔŕ¤ĂŇĐËěˇÓĹѧ俿éŇ
˝Ń觨ÓËąčŇÂáĹĐĽŮéăŞéäżżéŇ
12. ˇŇèÓËąčŇ·Őč»ĂСͺ´éÇ¡ŇĂ´ÓŕąÔąˇŇĂŕş×éͧµéą¤×Í ˇŇ÷ӹҴéÇÂáşş¨ÓĹͧ·Ň§ˇŇõĹŇ´ ˇŇĂăŞéâ»ĂáˇĂÁ·ŐčŕˇŐčÂǢéͧˇŃşˇŇõͺʹͧ¤ÇŇÁµéͧˇŇâͧĽŮéăŞéäżżéŇ ˇŇĂşĂÔËŇäÇŇÁŕĘŐč§㹡ŇèÓËąčŇ ˇŇèѴËŇľĹѧ§ŇąŕľÔčÁŕľ×čÍĂͧĂŃş¤ÇŇÁµéͧˇŇĂăŞé§ŇąĘ٧ĘŘ´ áĹСŇâŇÂľĹѧ§ŇąĘčÇąŕˇÔą ĘÔč§ŕËĹčŇąŐé¶éŇŕ»çąˇĂłŐ˘Í§ĘÁŇĂě·ˇĂÔ´ ¨ĐľşÇčŇÁŐ¤ÇŇÁľĂéÍÁ˘Í§˘éÍÁŮĹŕľ×č͡ŇõѴĘÔąă¨ÁҡˇÇčŇ ŕą×čͧ¨ŇˇÁŐˇŇõԴµčÍĘ×čÍĘŇĂáşş real-time ˇŃşĘčÇąµčҧ ć
13. ĘÁŇĂě·ˇĂÔ´¨ĐĘ觼ŵč͡ŇĂ´ÓŕąÔąˇŇĂ·ŐčŕˇŐčÂǡѺĽŮéăŞéäżżéҴѧąŐé
˘éÍĘѧࡵ
1) ĽŮéÍ͡Ẻŕ¤Ă×͢čŇÂĘ×čÍĘŃŇł·ŐčąÓľŇ·ĂŇżżÔˇ˘éÍÁŮšĹŃşÁŇÂѧČŮąÂě¤Çş¤ŘÁ ¨Óŕ»çąµéͧ¤ÓąÖ§¶Ö§áşą´ěÇÔ´·ě˘ŃéąµčӢͧˇŇĂăŞé§Ňą·Řˇ»ĂĐŕŔ·µŇÁ˘é͡ÓËą´ ŕľ×čÍăËéˇŇĂĘ×čÍĘŇĂÁŐ¤ÇŇÁµčÍŕą×čͧáĹĐŕˇÔ´¤ÇŇÁ¤ŘéÁ¤čŇ㹡ŇĂŧ·Řąŕ¤Ă×͢čŇÂ
2) ˇŇĂÍ͡Ẻŕ¤Ă×͢čŇÂĘ×čÍĘŃŇłĘÓËĂŃş AMI ¨Đµéͧ¤ÓąÖ§¶Ö§¤ÇŇÁ¨Ř·ŐčĘŇÁŇö˘ÂŇÂä´éăąÍąŇ¤µ ŕľ×čÍĂͧĂŃşżŃ§ˇěŞŃą·Ň§ŕĹ×͡˘Í§ AMI
¨Ňˇ·ŐčˇĹčŇÇÁҾͨĐĘĂŘ»ä´éÇčŇ
1) »Ń¨¨Ń·ŐčÁռŵčͤÇŇÁĘÓŕĂ稢ͧˇŇĂĂÇÁͧ¤ě»ĂСͺµčҧ ć ˘Í§ĘÁŇĂě·ˇĂÔ´¨ĐŕĂÔčÁµŃé§áµč ˇŇĂÇҧἹ ˇŇĂÍ͡Ẻ áĹСŇĂ´ÓŕąÔąˇŇĂ «Ö觨еéͧĂѡÉŇăËéŕʶŐÂĂŔŇľ˘Í§ĂĐşşäÁčä´éĂŃşĽĹˇĂĐ·şăąŞčǧ˘Í§ˇŇĂ»ĂŃşŕ»ĹŐčÂą â´ÂĽŮé´ŮáŨеéͧÁŐ¤ÇŇÁŕ˘éŇ㨶֧ČѡÂŔŇľ˘Í§ÍŘ»ˇĂłěáĹĐĂĐşşÂčÍ ĂÇÁ¶Ö§ŕ§×čÍąä˘ăąˇŇ÷ӧҹĂčÇÁˇŃą
2) ˇŇĂľÔ¨ŇĂłŇŕʶŐÂĂŔŇľ˘Í§ĂĐşşŔŇÂËĹѧˇŇĂĂÇÁŕ˘éŇŕ»çąĘÁŇĂě·ˇĂÔ´ ĽŮé´ŮáĹĂĐşş¤Çäӹ֧¶Ö§ĹѡɳТͧ»ĂÔÁŇł·Ň§äżżéŇ·ŐčŕˇŐčÂǢéͧµčҧ ć ŕŞčą áç´Ńą ŕżĘŕ«ÍĂě ÇčŇÁŐˇŇĂŕ»ĹŐčÂąá»Ĺ§ä»ÍÂčҧäĂŔŇÂăµéŕ§×č͹䢡Ň÷ӧҹăąĘŔŇÇĐ»ˇµÔ ĘŔŇÇĐ·ĂŇąŕ«ŐÂąµě áĹĐĘŔŇÇСŇ÷ӧҹăąĂĐÂĐÂŇÇ
3) ˇŇõԴµŇÁÇŃ´ŕżĘŕ«ÍĂě´éÇÂÍŘ»ˇĂłěÇŃ´ PMU ¨Đ·ÓăËé·ĂŇş˘éÍÁŮŢͧµŃÇá»Ă·Ň§äżżéŇ·ŐčĘĐ·éÍą¶Ö§ľÄµÔˇĂĂÁ˘Í§ĂĐşş ŞčÇÂăËéĽŮé´ŮáĹĘŇÁŇö¤Çş¤ŘÁŕʶŐÂĂŔŇľ˘Í§áç´ŃąáĹĐ»éͧˇŃąŔŇÇĐäżżéŇ´Ńşä´éÍÂčҧ·Ńą·čǧ·Ő «Öč§ŕÁ×čÍąÓÁŇĂÇÁŕ˘éҡѺ෤âąâĹÂŐˇŇĂĘ×čÍĘŇâͧĘÁŇĂě·ˇĂÔ´ˇç¨ĐŞčÇÂăËéĽŮé´ŮáĹä´éŕËçąŔŇľĂÇÁ˘Í§ĂĐşşäżżéŇä´é¤ĂÍş¤ĹŘÁ·Ńé§ËÁ´
4) ˇŇĂ·ŐčĂĐşşäżżéҡÓĹѧÍҨÁŐˇŇ÷ӧҹşŇ§ĘčÇą·ŐčäÁčŕ»çąŕŞÔ§ŕĘéą ·ÓăËéˇŇĂÍ͡ẺĂÇÁ¶Ö§ˇŇĂÇÔŕ¤ĂŇĐËě¨Óŕ»çąµéͧăŞéâ»ĂáˇĂÁáĹĐŕ¤Ă×čͧÁ×ÍľÔŕČÉŕľÔčÁŕµÔÁ ŕľ×čͨÓĹͧ´ŮĽĹĹŃľ¸ě·Őčä´éŕ»ĂŐÂşŕ·ŐÂşˇŃşĘÔ觷Őč¤Ň´ˇŇĂłěäÇé â´Â·Řˇ¤ĂŃ駷ŐčÁŐἹ»ĂŃşŕ»ĹŐčÂąâ·âľâĹÂŐËĂ×ÍÁŐˇŇĂąÓÍŘ»ˇĂłěăËÁčŕ˘éŇÁŇ ĽŮé´ŮáĹĂĐşş¤ÇèÓĹͧĂٻẺˇŇ÷ӧҹŕľ×č͵ĂǨĘÍşˇčÍą
5) ĽŮé´ŮáĹĂĐşş¨Óŕ»çąµéͧÁŐâ¤Ă§ĘĂéҧľ×éą°ŇąĂĐşşĘŇĂĘąŕ·Č·ŐčÁŐŕʶŐÂĂŔŇľáĹĐÁŐ»ĂĐĘÔ·¸ÔŔŇľĘ٧ ŕľ×čÍĂͧĂŃş»ĂÔÁŇł˘éÍÁŮŨӹǹÁҡ¨ŇˇˇŇĂ´ÓŕąÔąˇŇâͧ·Ň§ŕĹ×͡ĘÁŇĂě·ˇĂÔ´·ŐčËĹҡËĹŇ «Ö觨ж١ĂÇşĂÇÁĘč§ăËéˇŃşĂĐşşşĂÔËŇèѴˇŇĂ·ŐčČŮąÂě¤Çş¤ŘÁ
6) ˇŇĂĘ×čÍĘŇĂĂĐËÇčҧˇĂÔ´˘Í§áµčĹĐľ×éą·Őč ¨ĐŞčÇÂăËéĂĐşşŕˇÔ´ˇŇ÷ӧҹ»ĂĐĘŇąˇŃą ÁŐˇŇĂĂŃşĘ觢éÍÁŮŶ֧ˇŃąáşş real-time ·ÓăËéŕÁ×čÍŕˇÔ´żÍĹ·ěĂĐşşˇç¨ĐĘŇÁŇöá¡ĘčÇą·Őčä´éĂŃşĽĹˇĂĐ·şÍ͡ä´éÍÂčҧĂÇ´ŕĂçÇ Ę觼ĹăËéäÁčŕˇÔ´äżżéŇ´Ńşŕ»çąÇ§ˇÇéҧ
7) ˇŇĂÍ͡ẺÇҧἹáĹĐŕµĂŐÂÁˇŇĂŕ¤Ă×͢čŇÂĘ×čÍĘŃŇł ŕľ×čÍʹѺʹعˇŇĂËĹÍÁĂÇÁâ¤Ă§ĘĂéҧľ×éą°Ňą˘Í§·ŘˇżŃ§ˇěŞŃąˇŇ÷ӧҹăąĘÁŇĂě·ˇĂÔ´ ¨Óŕ»çąµéͧľÔ¨ŇóҡŇĂĘ×čÍĘŇĂĂĐËÇčҧżŃ§ˇěŞŃą·ŐčŕˇŐčÂǢéͧˇŃşˇŇĂĽĹÔµ ˇŇĂĘ觨čŇ áĹФÇŇÁµéͧˇŇĂăŞéäżżéŇ â´Â¤ÇŇÁ¤ŘéÁ¤čҢͧĂĐşş¨ĐÁŐÁҡ˘Öéą ŕÁ×čͿѧˇěŞŃąşąŕ·¤âąâĹÂŐ˘ŃéąĘ٧ŕËĹčŇąŐéä´éăŞéâ¤Ă§˘čŇ¡ŇĂĘ×čÍĘŇĂĂÇÁşąáľĹ·żÍĂěÁ·ŐčÁŐÁҵáŇĂĂѡÉҤÇŇÁ»ĹÍ´ŔŃÂĂčÇÁˇŃą
¨Ňˇŕą×éÍËŇ·Ńé§ĘͧµÍą·ŐčąÓŕĘąÍÁŇ ¤§·ÓăËéĽŮéÍčŇąÁͧŕËçąŔŇľâ´ÂĂÇÁ˘Í§ĂĐşşĘÁŇĂě·ˇĂÔ´Áҡ˘Öéą ˇŇþѲąŇĂĐşşµčŇ§ć ąŃéąĹéÇąµéͧˇŇĂăËéĂĐşşÁŐ¤ÇŇÁŕʶŐÂĂáĹСŇĂŕŞ×čÍÁµčÍáĹĐĘč§ĂĐşşľĹѧ§ŇąąŃéąŕ»çąä»ä´éÍÂčҧ·ŃčǶ֧ ÁŐ¤ÇŇÁ»ĹÍ´ŔŃ áĹеĂǨĘÍşĂĐşşˇŇ÷ӧҹä´éŕ»çąÍÂčҧ´ŐąŃčąŕͧ

ʧǹĹÔ˘ĘÔ·¸Ôě µŇÁľĂĐĂŇŞşŃѵÔĹÔ˘ĘÔ·¸Ôě ľ.Č. 2539 www.thailandindustry.com
Copyright (C) 2009 www.thailandindustry.com All rights reserved.
˘ÍʧǹĘÔ·¸Ôě ˘éÍÁŮĹ ŕą×éÍËŇ ş·¤ÇŇÁ áĹĐĂŮ»ŔŇľ (ăąĘčÇą·Őč·Ó˘Öéąŕͧ) ·Ńé§ËÁ´·Őč»Ăҡ®ÍÂŮčăąŕÇçşä«µě www.thailandindustry.com ËéŇÁÁÔăËéşŘ¤¤Ĺă´ ¤Ń´Ĺ͡ ËĂ×Í ·ÓĘÓŕąŇ ËĂ×Í ´Ń´á»Ĺ§ ˘éͤÇŇÁËĂ×Íş·¤ÇŇÁă´ć ˘Í§ŕÇçşä«µě ËҡĽŮéă´ĹĐŕÁÔ´ äÁčÇčҡŇĂĹ͡ŕĹŐÂą ËĂ×ÍąÓĘčǹ˹Öč§Ęčǹ㴢ͧş·¤ÇŇÁąŐéä»ăŞé ´Ń´á»Ĺ§ â´ÂäÁčä´éĂѺ͹Řҵŕ»çąĹŇÂĹѡɳěÍѡÉĂ ¨Đ¶Ůˇ´ÓŕąÔą¤´Ő µŇÁ·Ő衯ËÁŇÂşŃѵÔäÇéĘ٧ĘŘ´