»СТ БС¦РИГ
КТўТЗФЄТа·¤в№вЕВХБХаґХВ БЛТЗФ·ВТЕСВа·¤в№вЕВХѕГРЁНБаЎЕйТё№єШГХ
аГХВ№ГЩйбЕРаўйТгЁаѕЧиНЎТГННЎбєєЗ§ЁГўСєКСТі PWM ґйЗВдН«ХКУаГзЁГЩ»
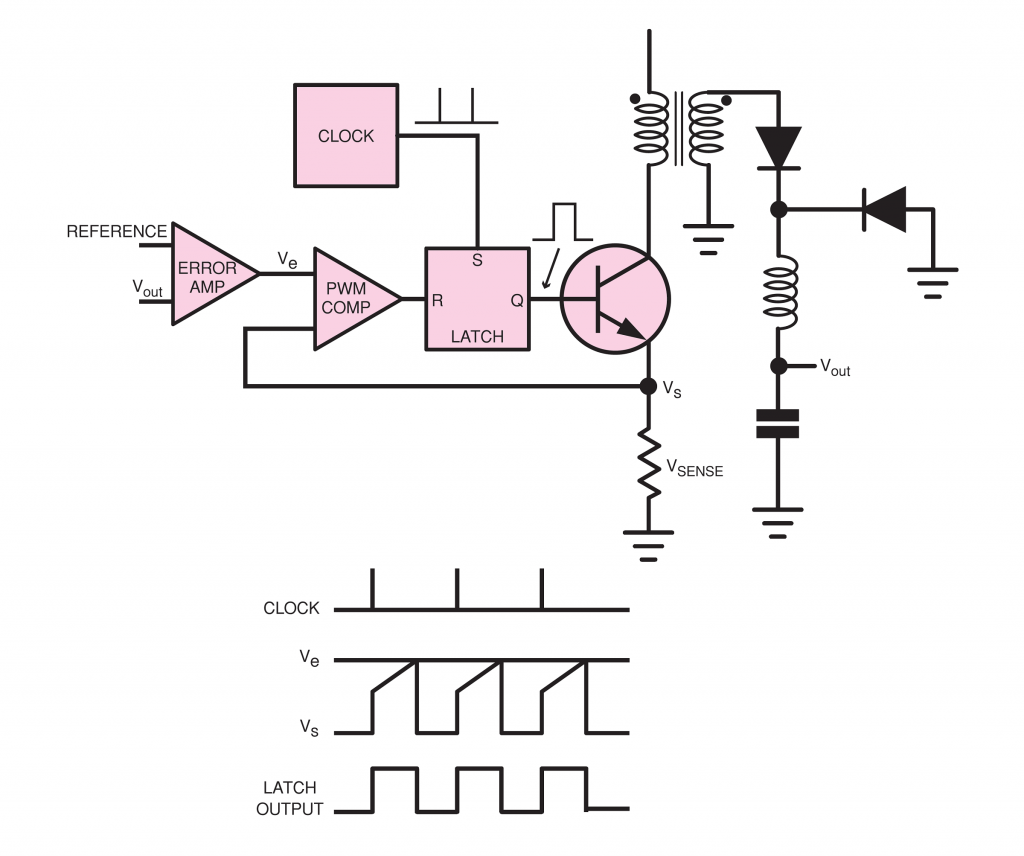
ўйНдґйа»ГХВєўН§ЎТГ¤Зє¤ШБЗ§ЁГКЗФµ«мЄФи§аѕЗаЗНГм«СѕѕЕТВг№вЛБґЎГРбК·Хи№ФВБгЄйг№»СЁЁШєС№БТЎЎЗиТЗФёХЛГЧНа·¤№Ф¤ PWM бєєаґФБ ж ·Хи»ГСͺ仴йЗВ¤ШіКБєСµФ·Хивґґаґи№ аЄи№ ЎТГЄґаЄВКСТіЎиН№ЕиЗ§Л№йТбєєНСµв№БСµФ (Automatic Feedforward Compensation) ЎТГбЎйдў¤ЗТБКББТµГўН§КСТібєєНСµв№БСµФ (Automatic Symmetry Correction) ·ХиаГХВє§иТВКТБТГ¶µНєК№Н§µиНАТГР·Т§аНТµмѕШµ·ХиаѕФиБўЦй№бЕР¤ЗТБКТБТГ¶г№ЎТГ·У§Т№бєєў№Т№ЄШґЗ§ЁГ »з№µй№ вґВє·¤ЗТБ№Хй№УаК№НЎТГ¤Зє¤ШБКСТі¤ЗТБЎЗйТ§ѕСЕКмўН§З§ЁГКЗФµ«мЄФи§аѕТаЗНГм«СѕѕЕТВг№вЛБґЎГРбКвґВгЄйдН«Х UC3846 ·Хи№ФВБгЄйЗ§бЛЕи§ЁиТВдїбєєКЗФµ«мЄФи§бЕРг№аБ№єНГмґўН§а¤ГЧиН§аЄЧиНБдїїйТЛЕТВж ГШи№г№»СЁЁШєС№
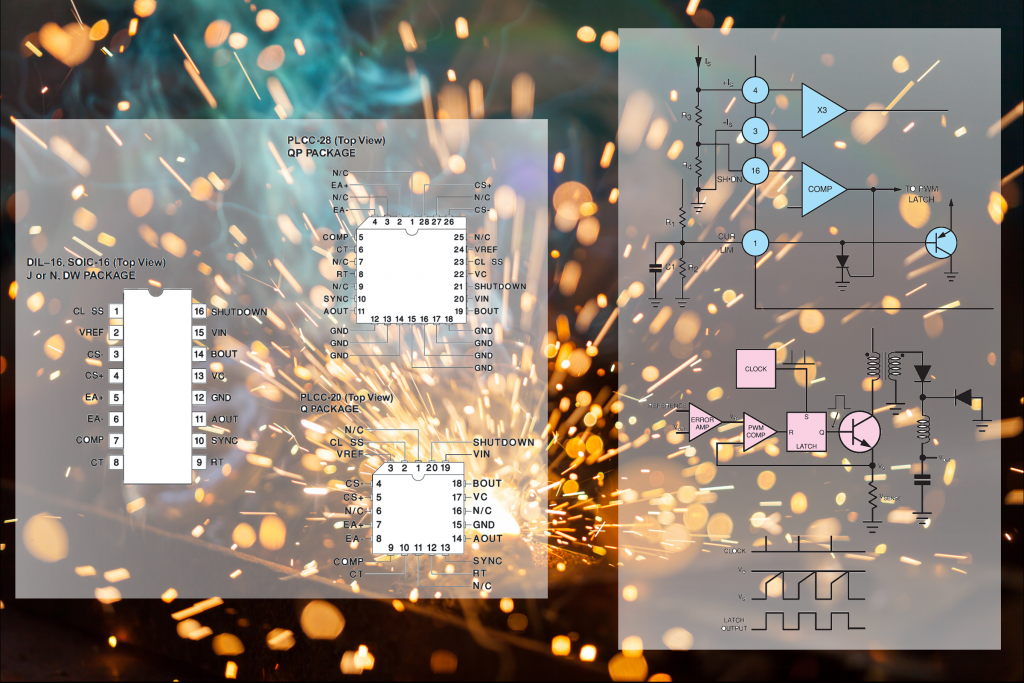
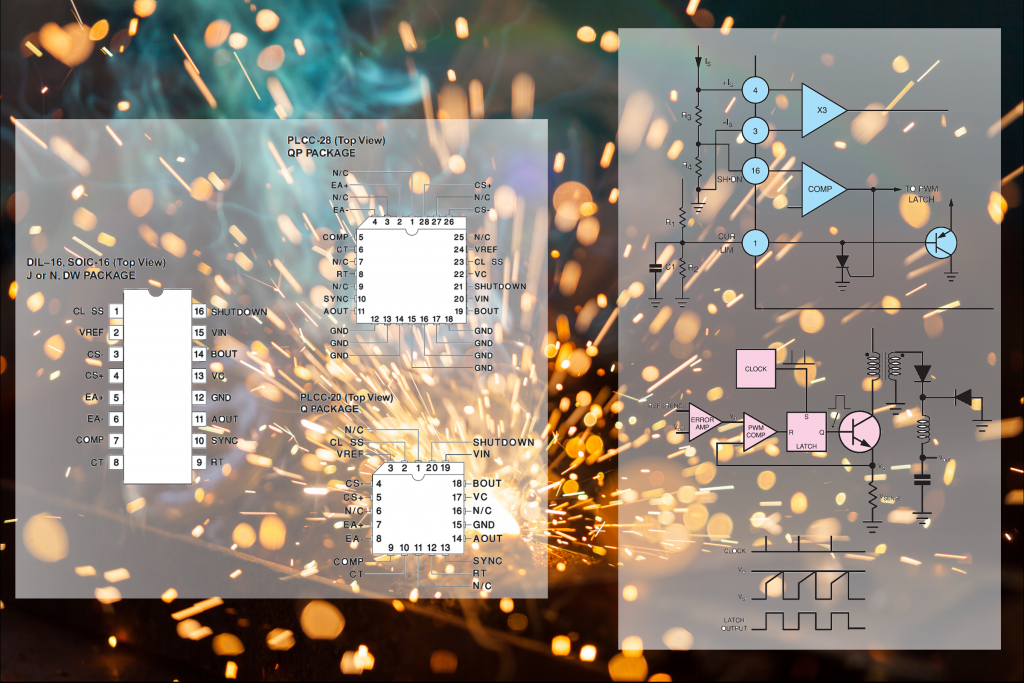
дН«Х UC3846 а»з№дН«Х·Хи№ФВБгЄй КУЛГСєЎТГ¤Зє¤ШБг№вЛБґЎГРбК вґВБХЁШґБШи§ЛБТВКУЛГСєЎТГННЎбєєбЕРгЄй§Т№·Хи¤ЗТБаГзЗКЩ§бЕРЎТГ·У§Т№·Хи¶ЩЎµйН§а»з№КФи§КУ¤С аѕЧиНгЄйбЎй»СЛТдН«Хг№бєєаґФБж ·Хи¤иН№ўйТ§аЎФґЎТГЛ№иЗ§ўН§КСТіНФ№ѕШµбЕРаНТ·мѕШ··ХиБХ¤иТБТЎ вґВЎГРбКаНТµмѕШµ¶ЩЎЁУЎСґНСµГТКЕЩаЕµ (Slew Rate) аѕЧиНЎТГЕґ·Н№¤ЗТБдЗўН§КСТіГєЎЗ№а»з№КУ¤СЎТГКЗФµ«м·Хи¤ЗТБаГзЗКЩ§ўН§НШ»ЎГімЎУЕС§ FET і ¤иТЎГРбКаНТµмѕШµКЩ§КШґ 1.5A бЕРБХКСТі TTL ·ХиБХаНТµмѕШµНФБѕФбґ№«мµиУЎСєїС§ЎмЄСи№ Tri-State аБЧиНгЄйа»з№НФ№ѕШ·«Ф§¤м
№НЎЁТЎ№Хй дН«ХВС§БХГРєєЎГТЗґмАТВг№ЄФ»дН«Х·ХидґйГСєЎТГ»ГСє»ГШ§аѕЧиНЕґ "КСТіГєЎЗ№" ·ХиаЎФґўЦй№г№ўіР·ХиБХЎТГўСєвЛЕґ·ХиБХ¤ШіКБєСµФа»з№µСЗаЎзє»ГРЁШў№ТґгЛиЎСєЎТГ»ГСє»ГШ§З§ЁГўВТВКСТі¤ЗТБбµЎµиТ§ЎГРбК·Хи»йН§ЎС№КСТіГєЎЗ№·ХиаѕФиББТЎўЦй№г№ГРЛЗиТ§ЎТГўВТВКСТі КиЗ№¤ШіКБєСµФНЧи№ж аѕФиБаµФБдґйбЎи ¤иТЎГРбКННК«ФаЕаµНГм·ХиГТєаГХВє¶Ц§ 8% КУЛГСє¤ЗТБ¶ХигЄй§Т№·Хи¶ЩЎµйН§бЕРЎТГ¤Зє¤ШБаЗЕТ “Dead Time” ·Хиў№Тґ 1V, 5%; ГЗБ¶Ц§ЎТГ»йН§ЎС№КСТіГєЎЗ№ ESD ўСй№µиУ¶Ц§ 4 ЎФвЕвЗЕµм КУЛГСєўТКСТі·ШЎўТ
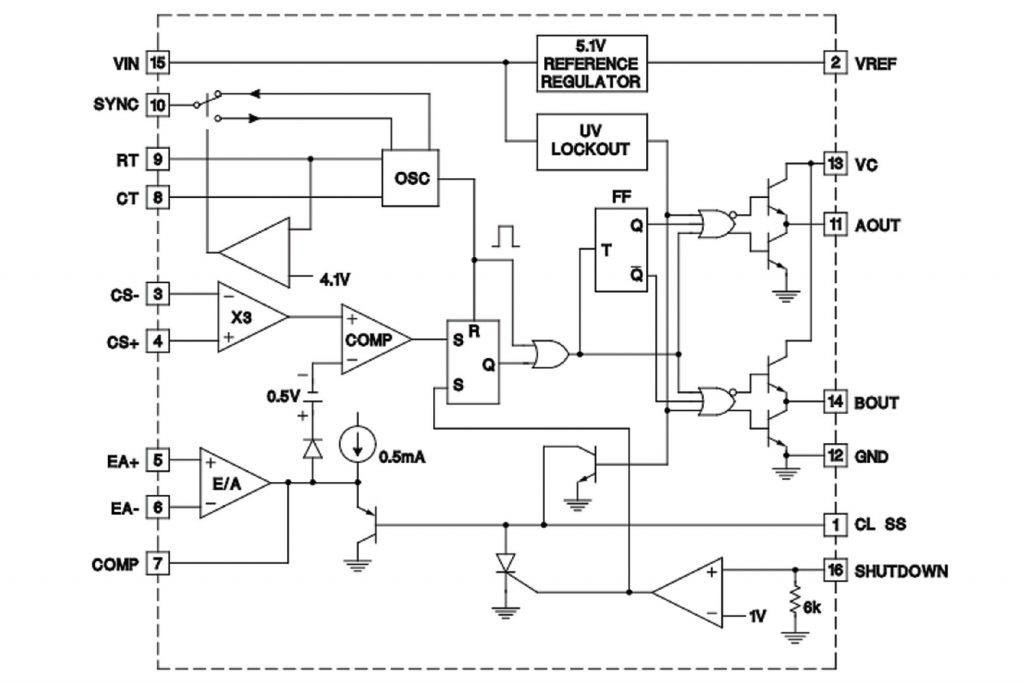
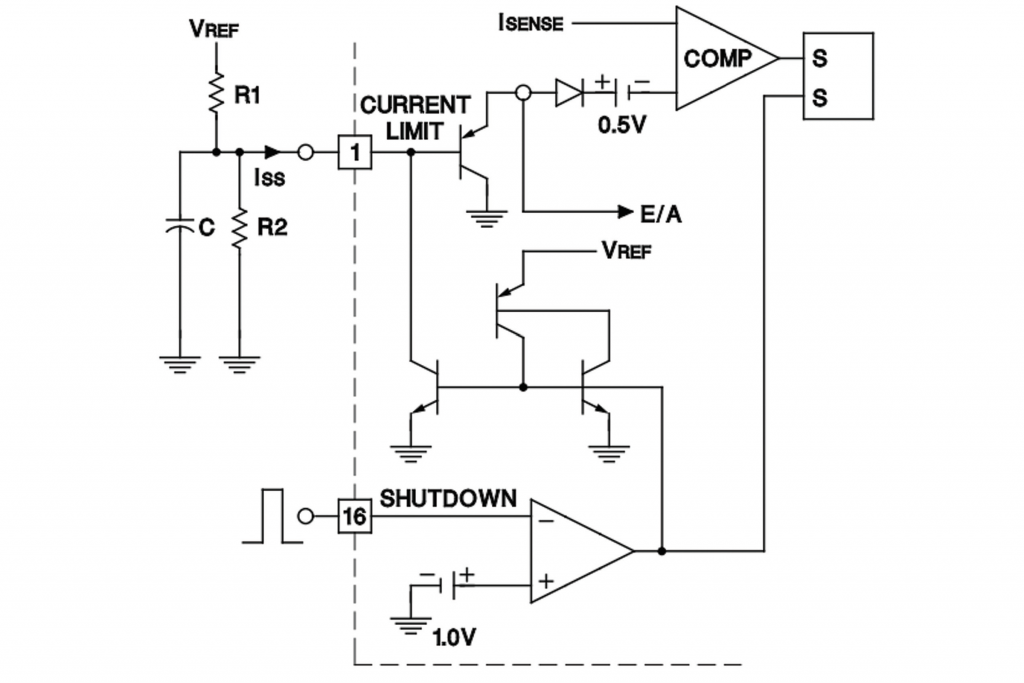
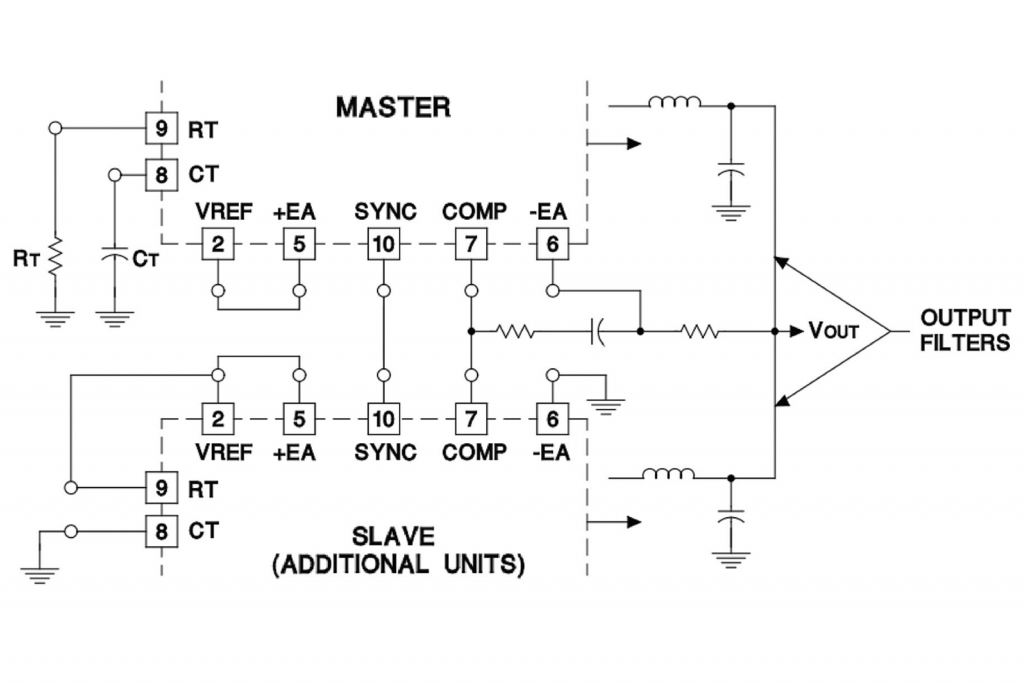
ГЩ»·Хи 1 єЕзНЎдґНРбЎГБЎТГ·У§Т№ (BLOCK DIAGRAM)
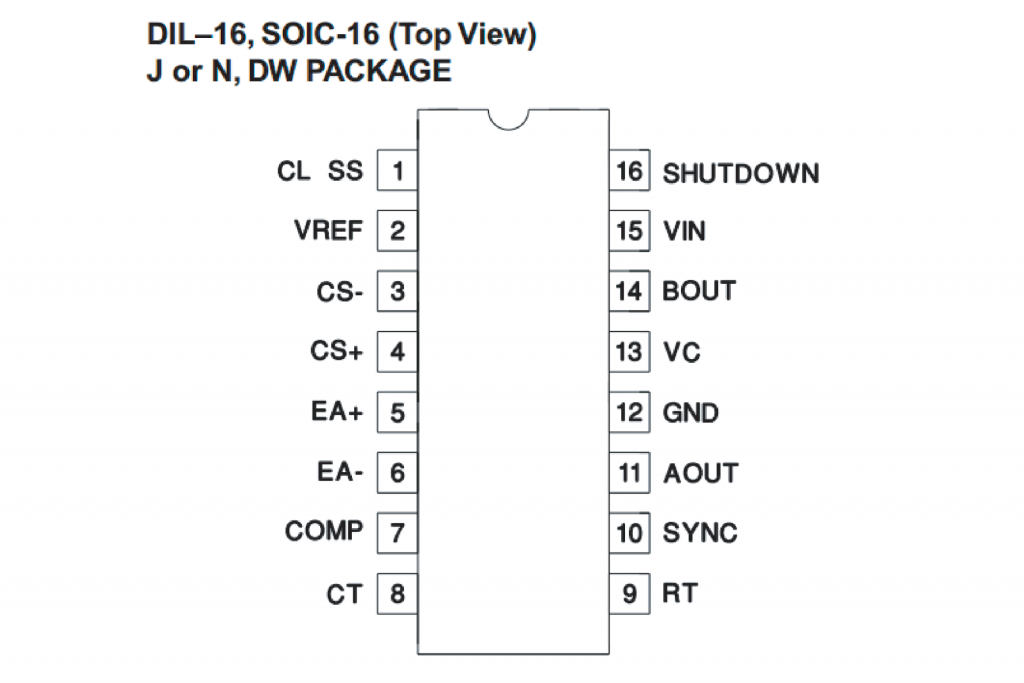
ГЩ»·Хи 2 µСЗ¶С§бЕРўТµиНгЄй§Т№ўН§дН«ХаєНГм UC3846 г№бєєµиТ§ ж
г№ЄиЗ§ЛЕТВ»Х·ХијиТ№БТ¤ЗТБ№иТК№гЁг№ЎТГ¤Зє¤ШБвЛБґЎГРбКўН§НФ№аЗНГмаµНГмдґйа»ЕХиВ№б»Е§д»ЁТЎЎТГ¤Зє¤ШБбєєаґФБ ж вґВбµиаґФБ№Сй№ЎТГ¤Зє¤ШБг№вЛБґЎГРбКАТВг№ЕЩ»ґйТ№аНТµмѕШµўН§ЛБйНб»Е§·Т§ўґа«ЎС№№ґТГХд»КЩиЎТГ¤Зє¤ШБ¤иТЎГРбККЩ§КШґг№ўґЕЗґаЛ№ХиВЗ№УЎСєЎТГµГЗЁЁСєКСТібГ§ґС№·ХијФґѕЕТґ КиЗ№гЛиЁРгЄй¤Зє¤ШБНСµГТКиЗ№ґФЗµХйд«а¤ФйЕ·Хи·УЛ№йТ·Хи¤Зє¤ШБ¤ЗТБЎЗйТ§КСТіѕСЕКм㹤͹аЗНГмаµНГмбєє·СиЗд» бµиг№·Т§»ЇФєСµФЁГФ§ ЎТГ·ґб·№ґйЗВЎТГа»ГХВєа·ХВєбГ§ґС№·ХијФґѕЕТґЎСєбГ§ґС№бГБѕм (Voltage Ramp) «Ци§а»з№ЎТГа»ГХВєа·ХВєКСТіЎГРбКдїїйТг№аЄФ§НР№ТЕзНЎўН§ўґЕЗґаЛ№ХиВЗ№Уа»з№ЛЕСЎ·ХиєС§¤СєгЛйЎГРбККЩ§КШґд»µТБГРґСєўН§бГ§ґС№дїїйТ·ХигЄй§Т№ЁТЎЎТГµГЗЁКНєКСТібГ§ґС№·ХијФґѕЕТґ (Error Voltage) г№З§ЁГ
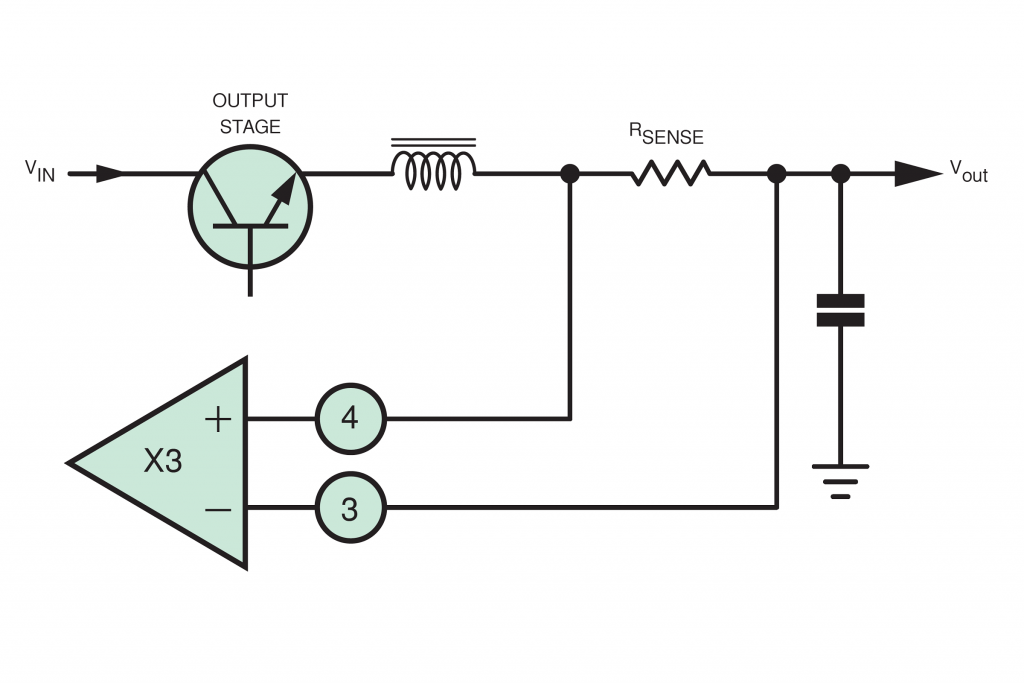
ГЩ»·Хи 3 ЎТГ¤Зє¤ШБ¤ЗТБ¶Х褧·Хиг№вЛБґЎГРбКўН§З§ЁГєС¤ ¤Н№аЗНГмаµНГм
µСЗНВиТ§З§ЁГґС§ГЩ»·Хи 3 бКґ§єЕзНЎдґНРбЎГБНВиТ§§иТВКУЛГСєЎТГ¤Зє¤ШБ¤ЗТБ¶Х褧·Хиг№З§ЁГєС¤¤Н№аЗНГмаµНГмг№вЛБґЎГРбК «Ци§бКґ§КСТібГ§ґС№·ХијФґѕЕТґ аБЧиН Ve ¤ЧН ЎТГ¤Зє¤ШБКЗФ·«мЄФи§·ХиЎГРбККЩ§КШґ «Ци§а»з№КСґКиЗ№а©ЕХиВўН§ЎГРбКаЛ№ХиВЗ№У·Сй§ЛБґ вґВ·ХиЎГРбКаЛ№ХиВЗ№Уа©ЕХиВКТБТГ¶а»ЕХиВ№б»Е§д»µТБКСТібГ§ґС№·ХијФґѕЕТґ («Ц觵СЗаЛ№ХиВЗ№УНТЁ¶ЩЎб·№·ХиґйЗВбЛЕи§ЁиТВЎГРбК) «Ци§ўйНґХўН§З§ЁГ№Хй ¤ЧН »ГРКФ·ёФАТѕвґВГЗБбЕРЎТГµНєК№Н§µиНКСТі·ГТ№аЄХиВ№·ХиаГХВє§иТВбЕРЎТГННЎбєєЗ§ЁГ¤Зє¤ШБ·ХидБи«Сє«йН№ЎСєЕЩ»»йН№ЎЕСє·ХиµГЗЁЁСє¤иТЎГРбККЩ§КШґбєєНСµв№БСµФ ЁРКи§јЕµиНЎТГКБґШЕўН§їЕСЎ«м·ХиаЎФґўЦй№НВиТ§аЛБТРКБ ґС§№Сй№ ЁЦ§дБиЁУа»з№µйН§ННЎбєєЗ§ЁГ·ХиБХ¤ЗТБ«Сє«йН№г№З§ЁГвґВаѕХВ§ЎТГЁУЎСґЎТГбЎЗи§ўН§ЁШґКЩ§КШґўН§бГ§ґС№ўйНјФґѕЕТґ (Error Voltage) ·ХиаЎФґўЦй№ аѕЧиНЁУЎСґ¤иТЎГРбККЩ§КШґНВиТ§©СєѕЕС№гЛй»ГРКєјЕКУаГзЁа»з№ЛЕСЎКУ¤С
єЕзНЎдґНРбЎГБґС§ГЩ»·Хи 4 ¤ЧН їС§ЎмЄСи№·ХиЁУа»з№·Сй§ЛБґўН§µСЗ¤Зє¤ШБКСТі PWM бєєёГГБґТ µСЗ¤Зє¤ШБг№вБґЎГРбКЁРµйН§·УЎТГКЗФµЄм·Хи¤ЗТБаГзЗКЩ§ўН§ЎГРбКаЛ№ХиВЗ№УбЕРКТБТГ¶а»ГХВєа·ХВєКСТіѕСЕКмµиНѕСЕКм (Pulse-by-Pulse) ЎСєаНТµмѕШµўН§З§ЁГўВТВКСТі¤ЗТБµиТ§ўН§бГ§ґС№·ХијФґѕЕТґ (Error Amplifier) №Хйг№дН«Х UC3846 вґВгЄйЗ§ЁГўВТВ¤ЗТБµиТ§ўН§ЎГРбК·ХиµГЗЁКНєдґйЎСєаЎ№ўВТВКСТібєє¤§·Хи З§ЁГўВТВКСТіКТБТГ¶µГЗЁКНєбГ§ґС№дїїйТ·ХиБХў№ТґµиУБТЎ ж г№ўіР·ХиЎТГ»йН§ЎС№КСТіГєЎЗ№·ХиБХ»ГРКФ·ёФАТѕКЩ§
ГЩ»·Хи 4 З§ЁГўВТВКСТі¤ЗТБµиТ§ўН§бГ§ґС№·ХијФґѕЕТґбЕРЗ§ЁГўВТВ¤ЗТБµиТ§ўН§ЎГРбК
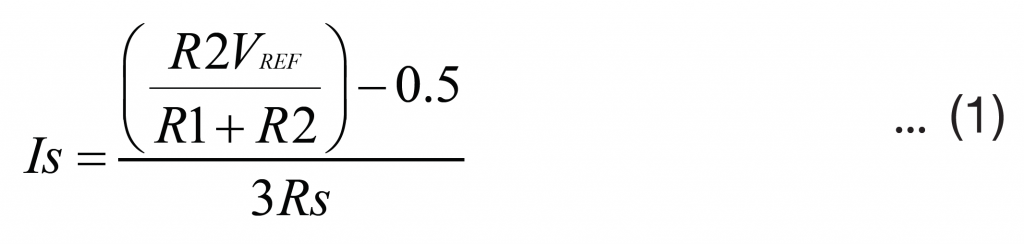
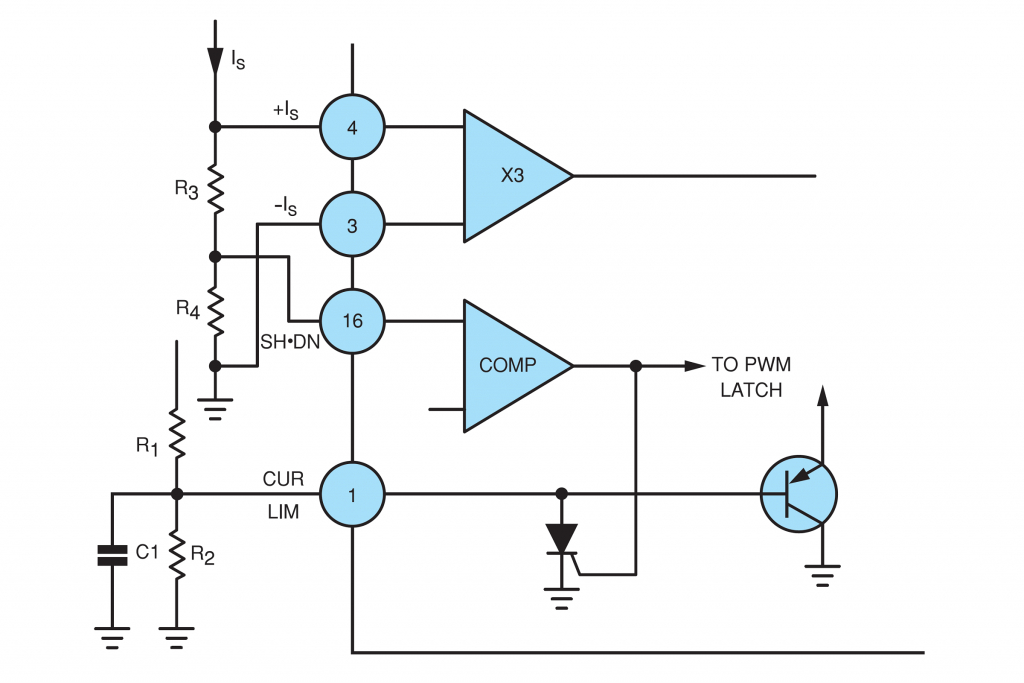
аБЧиН Is ¤иТЎГРбККЩ§КШґ (Peak Current)
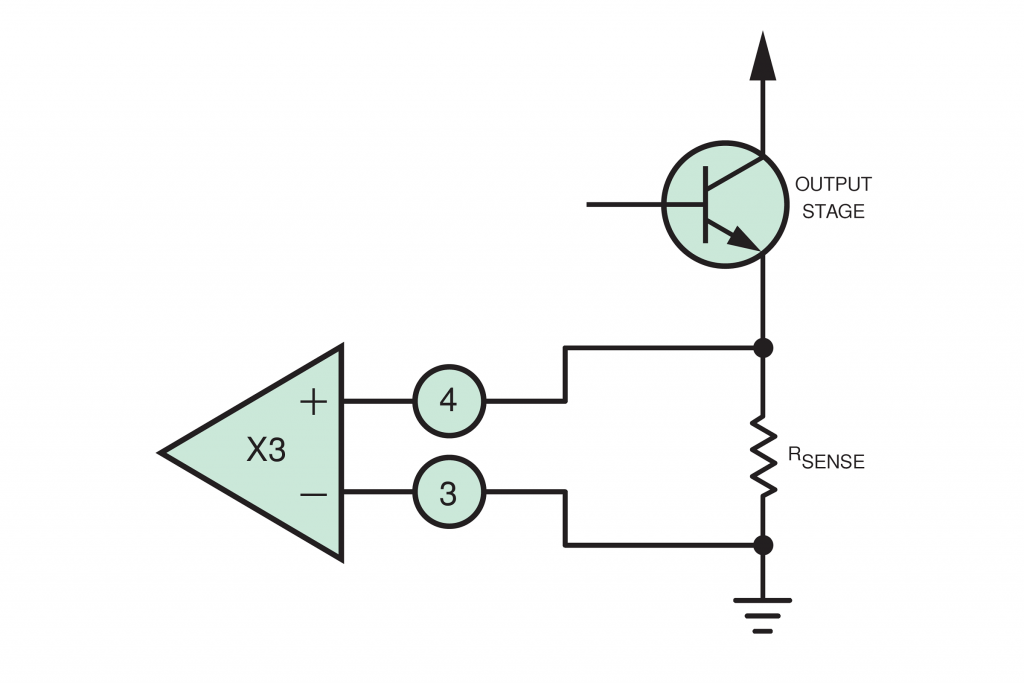
Current Sense Amplifier
ГЩ»·Хи 5(Ў), (ў) бЕР (¤) бКґ§ЗФёХЎТГµиТ§ ж ўН§ЎТГЎУЛ№ґ¤иТ ЎТГµГЗЁКНє¤иТЎГРбКг№ГРєєґйЗВЎТГµиНµСЗµйТ№·Т№вґВµГ§НВиТ§§иТВ НВиТ§дГЎзµТБ бГ§ґС№дїїйТКЩ§КШґ·ХиБХ¤иТЕґЕ§ бµиЎТГКЩаКХВг№ГЩ»ўН§¤ЗТБГйН№ЁРаЎФґўЦй№г№µСЗµйТ№·Т№·ХигЄйµГЗЁКНєЎГРбК КиЗ№ЎТГгЄйЛБйНб»Е§¤С»»ЕФй§·ХибВЎГРєєННК«ФаЕаµНГмбЕРЗ§ЁГЄШґЎУЕС§ННЎЁТЎЎС№аѕЧиНгЛйаЎФґ»ГРКФ·ёФАТѕКЩ§ бµиГТ¤ТбЕР¤ЗТБ«Сє«йН№ЁРаѕФиБўЦй№µТБ仴йЗВ вґВў№ТґбГ§ґС№дїїйТ·ХиµГЗЁКНєдґйЁРБХ¤иТБТЎбЕРКНґ¤ЕйН§ЎСєЎТГКЩаКХВЎУЕС§дїїйТ·ХиµиУГЗБ件֧КСТіГєЎЗ№µйН§БХ¤иТµиУбЕРЎТГЛ№иЗ§ўН§КСТіаНТµмѕШµ (Delay to Output) г№КиЗ№№Хйа·иТЎСє 250 №Тв№ЗФ№Т·Х ЎСєНСµГТаЎ№ўВТВКСТіа·иТЎСє 3
A.) RESISTIVE SENSING WITH GROUND REFERENCE
B.) RESISTIVE SENSING ABOVE GROUND
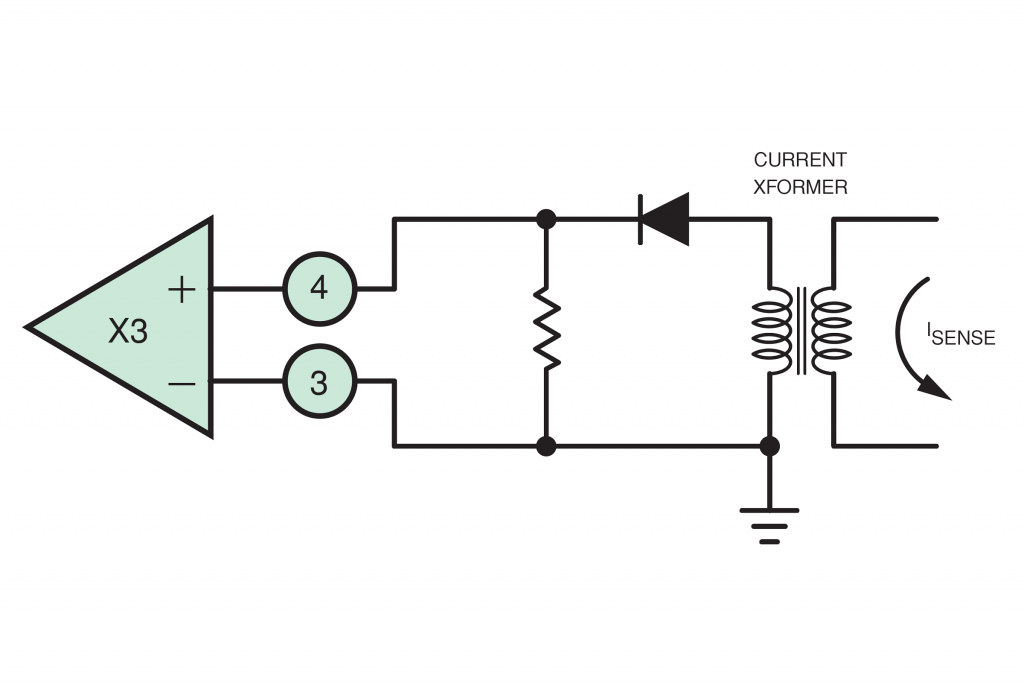
C.) ISOLATED CURRENT SENSING
ГЩ»·Хи 5 З§ЁГўВТВ¤ЗТБµиТ§ўН§ЎГРбКг№бєєµиТ§ж (VARIOUS CURRENT SENSE SCHEMES)
№НЎЁТЎ№Хй ¤ЗГГРБСґГРЗС§аБЧиНгЄйЎТГµГЗЁКНєЎГРбКґйЗВКЗФµ«мНФаЕзЎ·ГН№ФЎКм (ґС§ГЩ»·Хи 3A.) б·№ЎТГаЛ№ХиВЗ№УЎГРбК ґС§ГЩ»·Хи 5(ў) ¤ЧН аБЧиНКЗФµЄм·У§Т№ (On) КСТіЎГРбКК令м (Spike) ў№ТґгЛиКТБТГ¶аЎФґўЦй№НВиТ§©СєѕЕС№·ХиµСЗµйТ№·Т№·ХигЄйµГЗЁКНєЎГРбК а№ЧиН§ЁТЎµСЗаЎзє·ХиНВЩиг№в¤Г§КГйТ§ўН§ КЗФµЄмНФаЕзЎ·ГН№ФЎКмг№ЄиЗ§¤ТВ»ГРЁШ КСТіК令м№ХйБСЎЁРБХў№ТґаѕХВ§ѕН·ХиЁРКи§јЕµиНЎТГЛ№иЗ§ўН§ЎГРбК·ХиµГЗЁКНєбЕРЎТГ·У§Т№·ХијФґѕЕТґўН§З§ЁГ PWM вґВа©ѕТРНВиТ§ВФи§г№ЄиЗ§·Хи¤иТґФЗµСйд«а¤ФйЕ·ХиµиУКиЗ№µСЗЎГН§КСТі RC ў№ТґаЕзЎ (ґС§ГЩ»·Хи 6) ·ХиµиНН№ШЎГБЎСєНФ№ѕШµ аѕЧиНЕґў№ТґўН§КСТіК令мгЛйНВЩиг№ГРґСє·ХиВНБГСєдґй
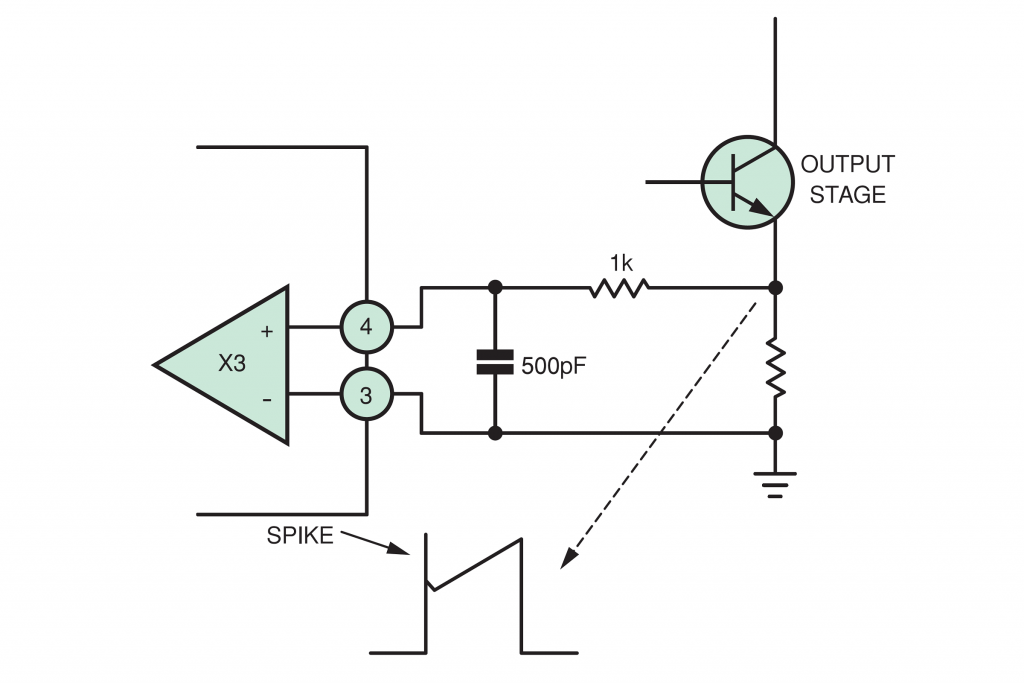
ГЩ»·Хи 6. RC FILTER КУЛГСєЎТГЕґ·Н№КСТі·ГТ№аЄХиВ№
аГЧиН§ўН§ННК«ФЕаЕаµНГм
ўйНБЩЕГТВЕРаНХВґЁТЎґТµйТЄХµЁРГРєШ¤ЗТБ¶ХиКЗФµЄмгЄй§Т№·ХиаЛБТРКБг№ЄиЗ§ 180 KHz -220 KHz вґВЄФ»¤Зє¤ШБ PWM КиЗ№гЛиµйН§»ГРКєЎСє»СЛТґйТ№НШіЛАЩБФбЕРЎТГЕґ·Н№ўН§¤ЗТБ¶ХигЄй§Т№ ·ГТ№«ФКаµНГм PNP г№аКй№·Т§ЎТГЎУа№ФґКСТіННК«ФаЕаµНГм UC 3846 БХаК¶ХВГАТѕ·Т§ґйТ№НШіЛАЩБФ·ХибЕР¤ЗТБ¤БЄСґўН§ГЩ»¤ЕЧи№КСТіґХаВХиВБ
ГЩ»·Хи 7 ЎТГЎУа№ФґКСТіўН§З§ЁГННК«ФаЕаµНГм
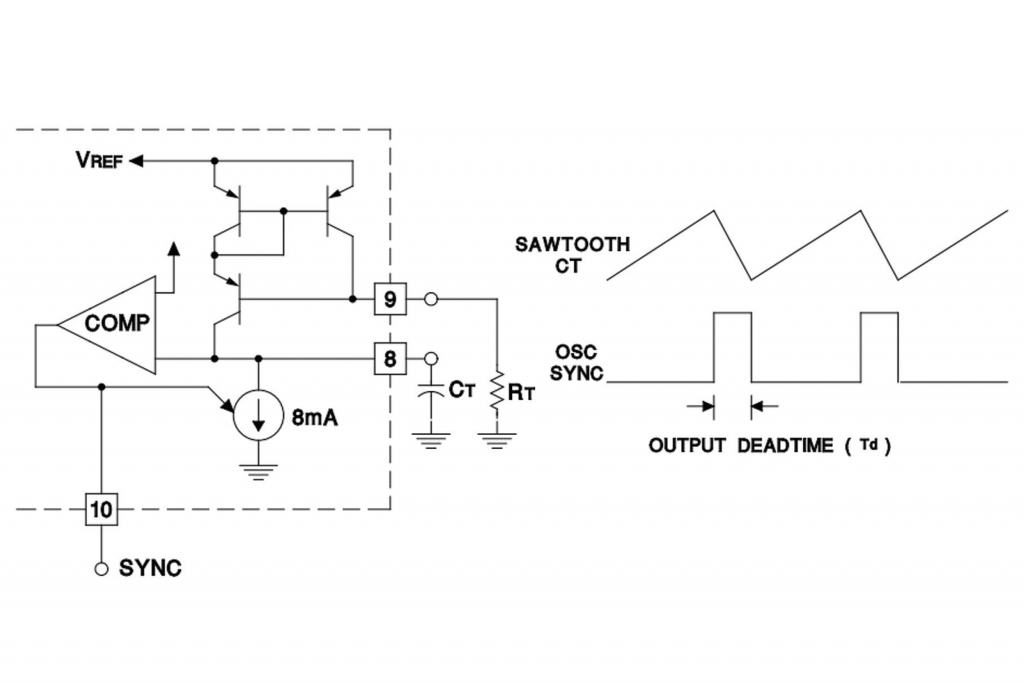
аНТµмѕШµўН§¤иТаЗЕТ “Dead Time” вґВЎТГЛТ¤иТўН§µСЗаЎзє»ГРЁШ·ХиµиНГиЗБАТВ№НЎЗ§ЁГ CT, дґйЁТЎКБЎТГ
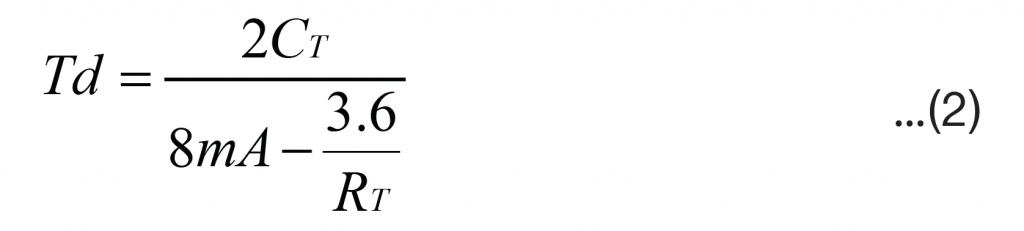
КУЛГСє¤иТў№ТґгЛиўН§ RT ¤ЧН
![]()
¤ЗТБ¶ХиаГв«б№№«мКТБТГ¶¤У№ЗідґйЁТЎКБЎТГ

ГЩ»·Хи 7 µСЗµйТ№·Т№АТВ№НЎ RT ЁРгЄйг№ЎТГКГйТ§ЎГРбК¤§·ХибЕРµСЗаЎзє»ГРЁШ CT ·УЛ№йТ·ХијЕФµГЩ»¤ЕЧи№КСТіїС№аЕЧиНВбєєаЄФ§аКй№ ¤ЗТБ¶ХиННК«ФаЕаµНГм НТЁЁР»ГРБТі¤иТдґйЁТЎЎТГаЕЧНЎ¤иТ RT бЕР CT аБЧиН RT г№ЄиЗ§ЁТЎ 1K д»Ё№¶Ц§ 500K бЕР CT НТЁБТЎЎЗиТ 100 pF КУЛГСєЎТГНйТ§НФ§ЎТГаЕЧНЎгЄй§Т№НВиТ§ГЗґаГзЗЁТЎ¤иТѕЕзНµўН§¤ЗТБ¶Хи аБЧиНа·ХВєЎСє RT бЕР CT ґС§ГЩ»·Хи 8
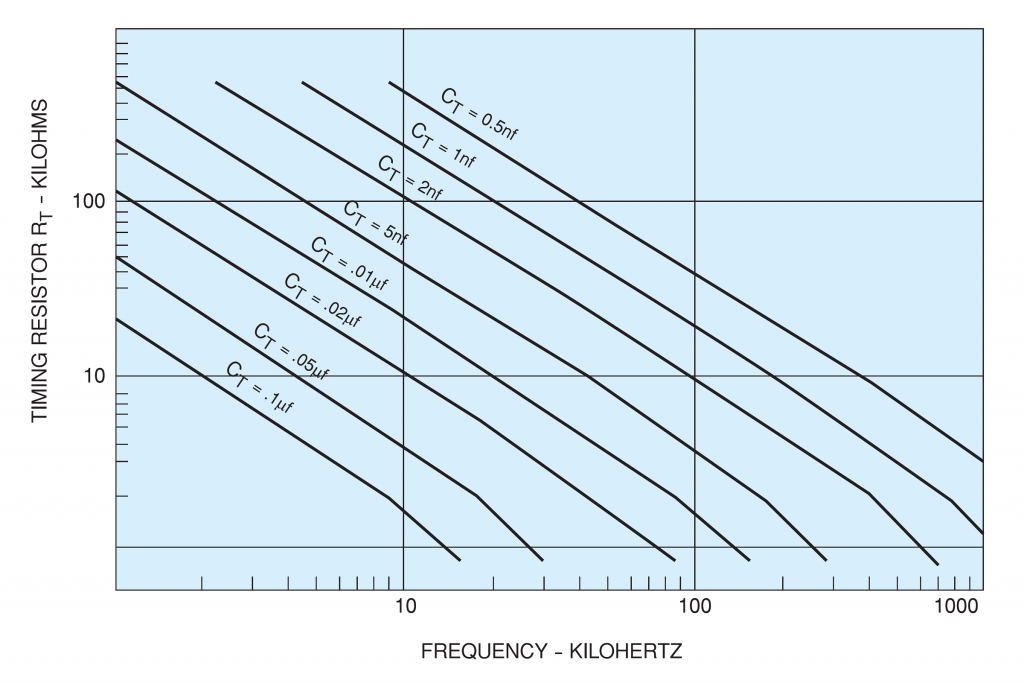
ГЩ»·Хи 8 ЎГТїа»ГХВєа·ХВєГРЛЗиТ§¤ЗТБ¶ХиННК«ФаЕНаµНГмЎСєїС§ЎмЄСи№ RT бЕР CT
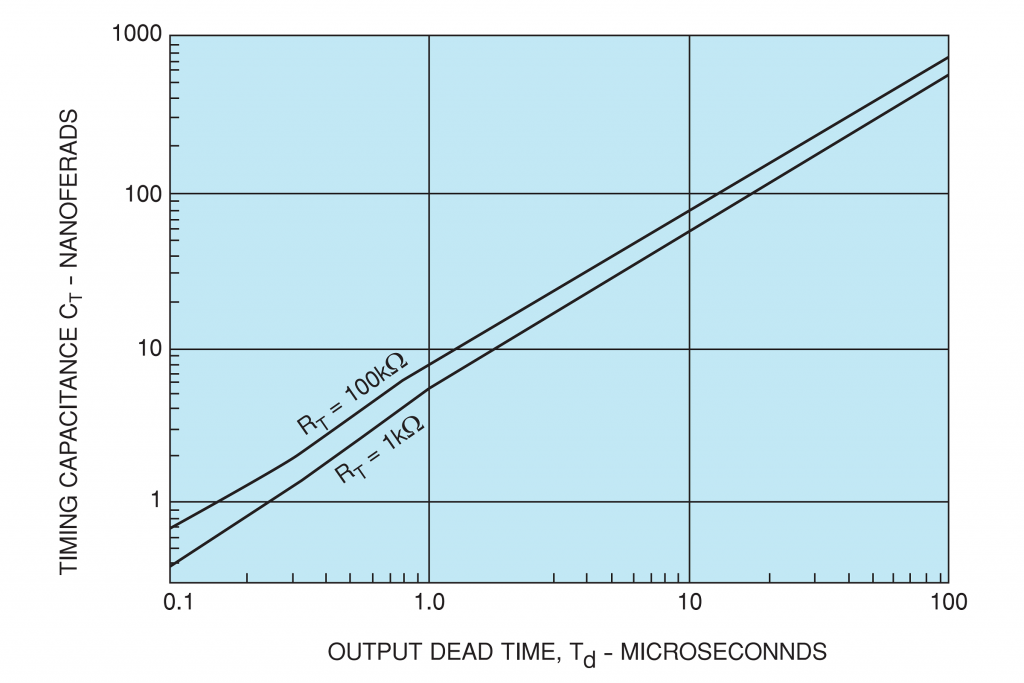
ГЩ»·Хи 9 ЎГТїаНТµмѕШµ¤иТаЗЕТ DEADTIME ўН§їС§ЎмЄСи№ CT
бБйЗиТµСЗаЎзє»ГРЁШ·ХиБХў№ТґаЕзЎ»ГРБТі 100 pF КТБТГ¶гЄй§Т№г№КАТѕбЗґЕйНБ·ХиБХаКХ§úЎЗ№µиУ бµиб№Р№УгЛй§Т№ CT ·Хи¤иТ»ГРБТі 1000 pF аѕЧиНЕґјЕЎГР·єўН§КСТіГєЎЗ№є№¤ЗТБ¶ХиННК«ФаЕаµНГм
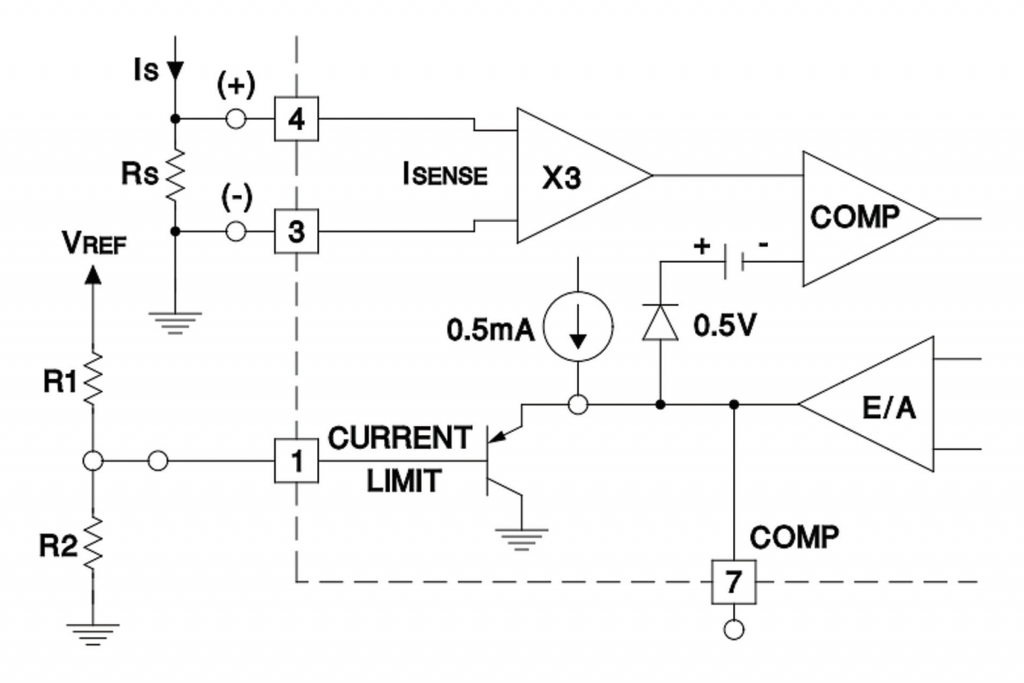
ЎТГЁУЎСґЎГРбК (Current Limit)
¤ШіКБєСµФ·Хи№иТК№гЁ·ХиКШґўН§¤Н№аЗНГмаµНГмг№вЛБґЎГРбК ¤ЧН ¤ЗТБКТБТГ¶г№ЎТГ ЁУЎСґЎГРбККЗФµЄмКЩ§КШґбєєѕСЕКмµиНѕСЕКм (Pulse-by-Pulse Current Limiting) НВиТ§§иТВаѕХВ§ЁУЎСґ¤иТбГ§ґС№·ХијФґѕЕТґ·ХиБХ¤иТКЩ§КШґ ґС§ГЩ»·Хи 10 ЎГРбККЩ§КШґ·ХиЁУЎСґг№ UC3846 КТБТГ¶·УдґйвґВгЄйЗ§ЁГбєи§бГ§ґС№дїїйТ аѕЧиНЎУЛ№ґбГ§ґС№дїїйТ·ХиўТ 1
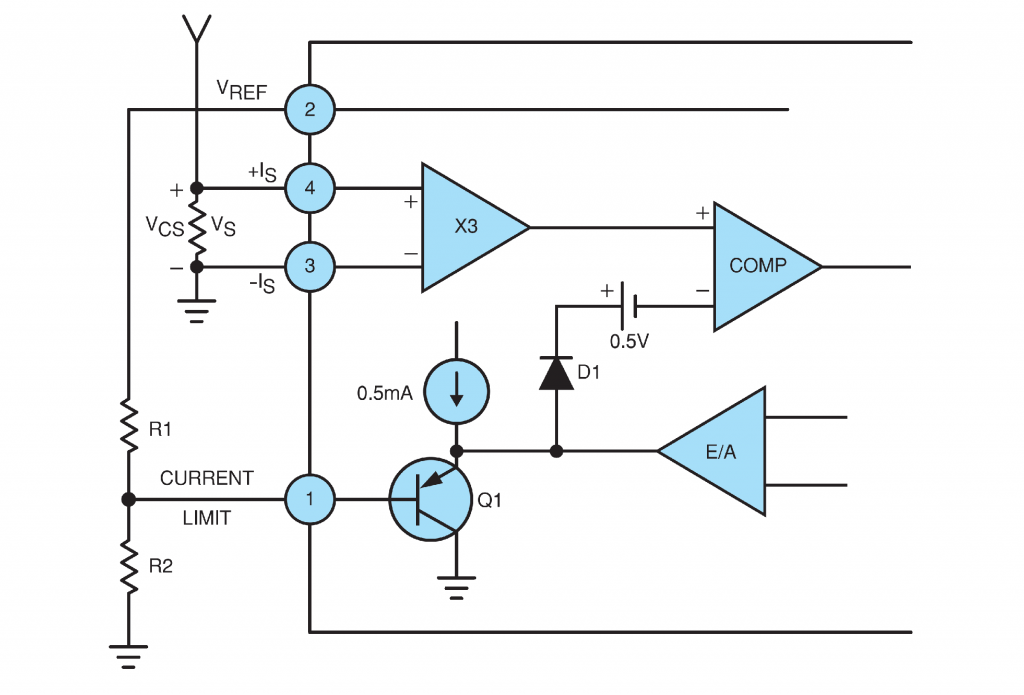
ГЩ»·Хи 10 ЎТГЁУЎСґ¤иТЎГРбККЩ§КШґг№З§ЁГ
јЕЕСѕёмбГ§ґС№дїїйТ·ХидґйГСєЁТЎўТ 1 ЁРаЄЧиНБµиНЎСє Q1 ·УЛ№йТ·Хиг№ЎТГб¤ЕБ»мКСТіаНТ·мѕШ·ўН§З§ЁГўВТВКСТібГ§ґС№·ХијФґѕЕТґ і ¤иТКЩ§КШґ ЁЦ§аЎФґбГ§ґС№µЎ¤ГиНБ·ХиўТаєКбЕРНХБФаµНГмўН§ Q1бЕРаЎФґбГ§ґС№дєбНКµГ§гЛйЎСєдґвНґ DI бГ§ґС№НФ№ѕШµ·Хиа»з№ЕєўН§З§ЁГа»ГХВєа·ХВєбГ§ґС№дїїйТ·Хи¶ЩЎб¤ЕБ»мг№ЄиЗ§ VPIN а·иТЎСє 1 -0.5V ЎТГаЕЧНЎгЄй§Т№µСЗµйТ№·Т№ R1 ¤ЗГгЛйаЎФґ¤ЗТБаЛБТРКБўН§ЎТГ¤§дЗйўН§ЎГРбК КУЛГСєЎТГЄСµґТЗ№мЗ§ЁГНХЎґйЗВ ґС§№Сй№ ЁЦ§¤ЗГЁРаЕЧНЎµСЗµйТ№·Т№µТБ·ХиГРєШдЗйг№КиЗ№¶Сґд» КСТігґж ·Хи№йНВЎЗиТ 0.5V і ЎГРбК·ХиЁУЎСґ·Т§НФ№ѕШµЁРГСє»ГРЎС№дґйЗиТаНТµмѕШµ·С駤ЩиЁРБХ¤иТа·иТЎСєИЩ№Вм·УгЛй·ХиўТ 1 БХК¶Т№РаўйТгЎЕй·Сй§ 2 К¶Т№Р ¤ЧН К¶Т№РЄСµґТЗ№мбЕРК¶Т№РаГФиБµй№ЎТГ·У§Т№ўН§З§ЁГ PWM ¶йТµСЗаЎзє»ГРЁШгЄй·ХиўТ·Хи 1 БХ¤иТµиУ (ґС§ГЩ»·Хи 11) бЕйЗбГ§ґС№дїїйТ·Т§НФ№ѕШµЁРаѕФиБўЦй№БТЎЎЗиТбГ§ґС№ “Undervoltage Lockout” µСЗаЎзє»ГРЁШЁР»ГРЁШѕЕС§§Т№бЕРЎТГаѕФиБўЦй№НВиТ§ЄйТ ж ўН§ґФЗµХйд«а¤ФйЕг№КСТі PWM бЕРЕСЎЙіРЎТГ·У§Т№аґХВЗЎС№ ¤ЧН ¶йТЗ§ЁГўВТВКСТіЄСµґТЗ№мБХКСТіѕСЕКмаЎФґўЦй№ Ки§јЕгЛй SCR ЛВШґ·У§Т№бЕРµСЗаЎзє»ГРЁШЁР¤ТВ»ГРЁШ (Discharge) ЎТГЄСµґТЗ№мЁРаЎФґўЦй№ѕГйНБЎСєЎТГаГФиБµй№ЎТГ·У§Т№гЛБиНВиТ§№ШиБ№ЗЕ·ХиНФКГРЁТЎ¤ЗТБЎЗйТ§ўН§КСТіѕСЕКм·Т§НФ№ѕШµ
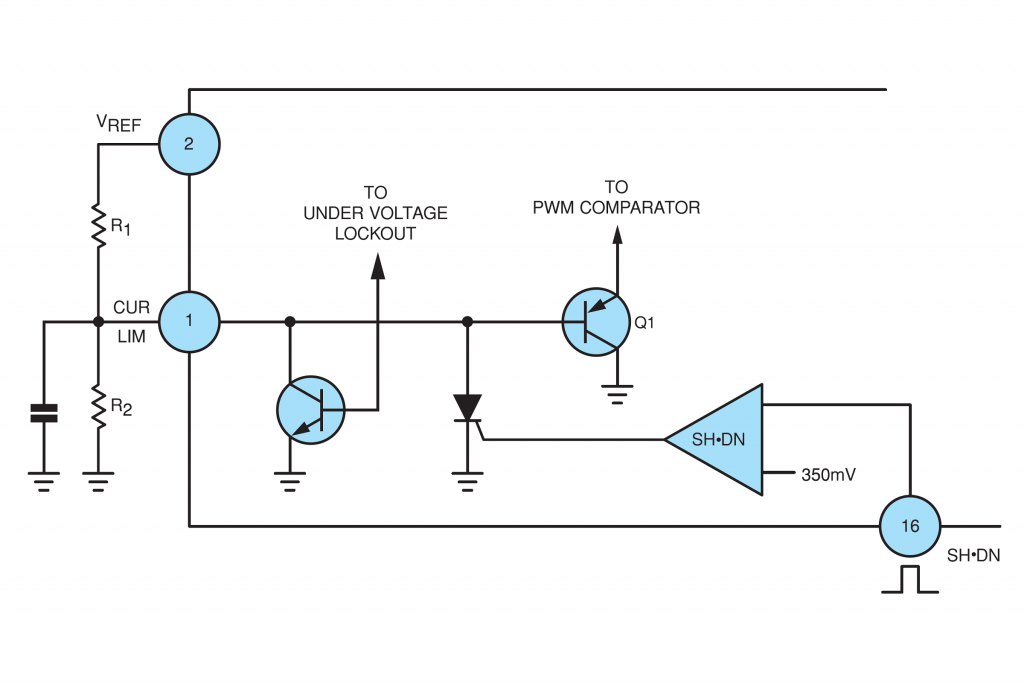
ГЩ»·Хи 11 ЎТГгЄй§Т№З§ЁГ Undervoltage Lockout КУЛГСєЎТГаГФиБµй№ЎТГ·У§Т№НВиТ§ЄйТ ж
ЎТГЄСµґТЗ№м (Shutdown)
З§ЁГЄСµґТЗ№м бКґ§ґС§ГЩ»·Хи 12 «Ц觶١ННЎбєєБТаѕЧиН·УЛ№йТ·ХидґйНВиТ§ГЗґаГзЗг№ЎТГЄСµґТЗ№мГРєє аБЧиНаЎФґўйНјФґѕЕТґгґ ж аЎФґўЦй№г№ГРєє КУЛГСєгЄйаѕЧиН»йН§ЎС№ЎТГаКХВЛТВўН§З§ЁГ вґВЗ§ЁГЄСµґТЗ№мБХНФ№ѕШµ·Хи»ГСͺ仴йЗВЗ§ЁГа»ГХВєа·ХВєбГ§ґС№дїїйТа·ГКвОЕґма·иТЎСє 1 вЗЕµм ЎСєЗ§ЁГЄґаЄВНШіЛАЩБФбЕРКиЗ№аНТµмѕШµ·Хи»ГРЎНєґйЗВЗ§ЁГбЕµ·м·ХигЄй·ГТ№«ФКаµНГм ЁУ№З№ 3 µСЗ (Q1, Q2 бЕР Q3) З§ЁГЄСµґТЗ№мЁР·У§Т№КБєЩГім аБЧиНБХКСТіБТЎЎЗиТбГ§ґС№а·ГКвОЕґм 1 вЗЕµм ўіР·ХибГ§ґС№ЄСµґТЗ№м (Vshutdown) г№ЄиЗ§бГ§ґС№дїїйТ 0 - 1.3 вЗЕµм ·ХиаЎФґўЦй№·ХиўТ 16 Ки§јЕгЛйаНТµмѕШµбЕµ·мКСТібЕРа«µ¤иТбЕµ·мгЛйЎСєЗ§ЁГ PWM бЕРЁРаЎФґКСТіаНТµмѕШµНВиТ§ГЗґаГзЗг№ЄиЗ§аЗЕТЎТГЛ№иЗ§а·иТЎСє 65 №Тв№ЗФ№Т·Х і ЁШґ№Хй Q1 µйН§ЎТГКСґКиЗ№ЎТГ№УЎГРбКвОЕґФй§ (IH) ·ХиµиУБТЎ»ГРБТі 1.5 БФЕЕФбНБб»Гм ўіР·ХиВС§¤§К¶Т№РбЕµ·мНВЩи ґС§№Сй№ ¶йТ R1 ·Хи¶ЩЎаЕЧНЎБХ¤иТБТЎЎЗиТ 5K, Q2 бЕР Q1 ЁР¤ТВ»ГРЁШбЕРµСЗаЎзє»ГРЁШ Cs ЁРаЎФґЎТГКРКБ»ГРЁШ·ХиўТ 1 аБЧиНа·ХВєЎСєЎГТЗґмбЕРКСєа»ЕХиВ№а»з№аНТ·мѕШµбЕµ·м·С№·Х ЛТЎ R1 ¶ЩЎаЕЧНЎ¤иТ·Хи№йНВЎЗиТ 2.5K, Q1 ЁР¤ТВ»ГРЁШбЕРВС§¤§НВЩиг№К¶Т№РбЕµ·мµиНд»Ё№ЎГР·Си§ЎУЕС§КСТіАТВ№НЎБХ¤иТа»з№ИЩ№Вм вґВ·Сй§КН§ЎГіХ·ХиЎЕиТЗБТ№Хй µСЗаЎзє»ГРЁШ Cs ЁР·У§Т№г№ЄиЗ§аГФиБµй№бЕРЎТГаГФиБµй№·У§Т№гЛБиНХЎ¤ГСй§г№ГНє¶Сґд»
ГЩ»·Хи 12 єЕзНЎЎТГ·У§Т№ўН§З§ЁГЄСµґТЗ№м
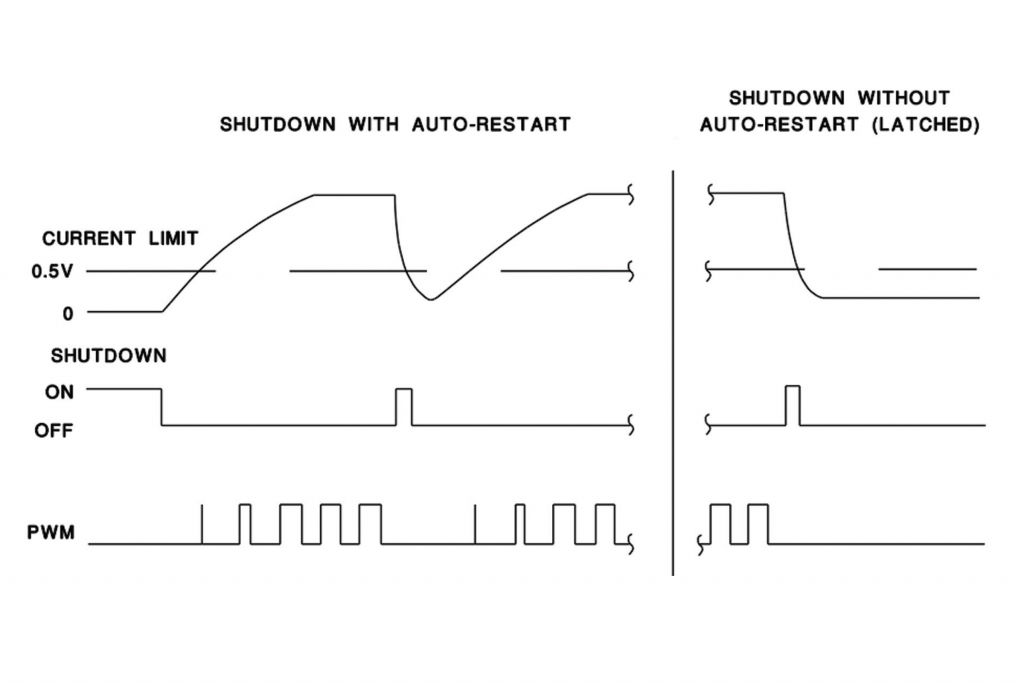
ГЩ»·Хи 13 бКґ§КСТі¤ЕЧи№г№ЄиЗ§аЗ§ЕТ·ХиКСБѕС№ёмЎСє PWM
µСЗНВиТ§аЄи№ З§ЁГЄСµґТЗ№мґС§ГЩ»·Хи 14 ЎТГ·У§Т№г№вЛБґ·ХидБигЄиЎТГбЕµ·м вґВ»йН§ЎС№ЎТГЁиТВЎГРбКдїїйТаЎФ№ѕФЎСґ аБЧиНаНТµмѕШµаЎФґЎТГЕСґЗ§ЁГ ЎТГдЛЕўН§ЎГРбКдїїйТг№µСЗаЛ№ХиВЗ№У·Т§аНТµмѕШµЁРКГйТ§јЕЕСѕём·ХиаЎФґЎТГаКХВЛТВа»з№НВиТ§БТЎ ЎТГЁУЎСґ¤иТЎГРбКдїїйТбєєѕСЕКмµиНѕСЕКмЎСєЎТГЛ№иЗ§аЗЕТўН§ѕСЕКм вґВ·СиЗд»ЁРдБиКТБТГ¶ЁУЎСґ¤иТЎГРбКаЛЕиТ№ХйгЛйНВЩиг№ГРґСє·ХиВНБГСєдґй «Ци§ЄиЗВгЛйЎТГЄСµґТЗ№мбєє№ШиБ№ЗЕбЕРЎТГаГФиБµй№·У§Т№г№ГНє¶Сґд» ¶йТЎГРбКаЎФ№ѕФЎСґ¶Ц§ГРґСєа·ГКвОЕґм вґВ¤иТ№Хй¤ЗГЁРБТЎЎЗиТ¤иТЁУЎСґЎГРбККЩ§КШґ «Ци§г№єТ§¤ГСй§ аГХВЎЗиТ “Hiccup Mode" бЕРїС§ЎмЄСи№ўН§ЎГРбКаЎФ№№ХйЁРЁУЎСґ·Сй§ЎУЕС§бЕРЎГРбККЩ§КШґ·Т§аНТµмѕШµЁ№ЎЗиТЎТГ·У§Т№ЁР¶ЩЎµйН§КБєЩГім
ГЩ»·Хи 14 єЕзНЎдґНРбЎГБўН§З§ЁГµГЗЁЁСєЎГРбКаЎФ№ГиЗБЎСєЗ§ЁГЄСµґТЗ№м
¤ЗТБ¤§·№µиНКСТіГєЎЗ№ (Noise Immunity)
г№З§ЁГ PWM ўйН¤ЗГГРЗС§·Хи§иТВ аѕЧиН»йН§ЎС№КСТіГєЎЗ№ЁТЎЎТГКЗФµ«мЄФи§ЎиН№аЗЕТНС№¤ЗГ·ХиННК«ФаЕаµНГмЁР¶ЩЎ·ГФЎгЛйаГФиБµй№·У§Т№г№ЁШґ·ХиаўйТгЎЕйЁШґа·ГКвОЕґмБТЎ·ХиКШґЎз¤ЧНвЛЕґ·Т§аНТµмѕШµБХК¶Т№Ра»з№¤Т»Т«ФµХївЛЕґў№ТґгЛи аЄи№ ўТаЎµўН§З§ЁГўСєЎУЕС§·Хиа»з№ FETs ·ХиўСєа¤ЕЧиН№аНТ·мѕШ·вґВµГ§бЕРГНєўН§ґФЗµХйд«а¤ФйЕаўйТгЎЕй 100% аЎГРбКК令м·ХиаЎХиВЗўйН§ЎСєаНТµмѕШµ·Ха»з№¤Т»Т«ФµХївЛЕґ№Хй НТЁ·УгЛйаЎФґЗ§ЁГаЎФґННК«ФаЕ·д»ЎиН№аЗЕТНС№¤ЗГКБ¤ЗГ Ки§јЕгЛйаЎФґЎТГаЕЧиН№¤ЗТБ¶Хи
ЎТГбЎй»СЛТ ¤ЧН ЎТГбВЎГРЛЗиТ§ЎГТЗґмўН§З§ЁГЎУЕС§·ХиЎГРбКдїїйТ·ХиБХ¤иТКЩ§ЎСєЎГТЗґмЁТЎЗ§ЁГ»ЎµФЛГЧНЎГТЗґмЁТЎбГ§ґС№·ХиБХў№ТґµиУж ННЎЁТЎЎС№ вґВгЄй CT ·ХиБХ¤иТБТЎЎЗиТ 1000 pF µиНаЄЧиНБвґВµГ§ЎСєўТ 12 бЕРЎТГґХ¤С»»ЕФй§·Сй§ўТ VIN бЕР VREF ЎСєµСЗаЎзє»ГРЁШєТВѕТК·ХиБХ¤ШіАТѕґХ «Ци§КТБТГ¶ЕґКСТіГєЎЗ№ґС§ЎЕиТЗЕ§дґй
ГЩ»·Хи 15 ЎТГаЄЧиНБµиНвБґЩЕЎУЕС§бєєў№Т№ЎС№ (Parallel Operation)
ЁТЎ·ХиЎЕиТЗБТ¤§ѕНа»з№ўйНБЩЕгЛй№СЎННЎбєєдґйа»з№б№З·Т§ИЦЎЙТбЕР·У¤ЗТБаўйТгЁг№дН«ХаєНГм№ХйдґйґХВФи§ўЦй№ г№ЎТЕўйТ§Л№йТГРєєКЗФµЄФи§ ЁР¶ЩЎ№УБТгЄй·Сй§·УЛ№йТ·ХиАТ¤ЁиТВдї а¤ГЧиН§аЄЧиНБвЕЛРдїїйТµЕНґЁ№АТ¤ўВТВЎУЕС§·Т§ґйТ№аКХВ§НВиТ§бНБ»м¤ЕТКґХБТЎВФи§ўЦй№ ·С駴йЗВЎТГЕґ»ГФБТі·Н§бґ§·ХигЄй·УЛБйНб»Е§ ў№ТґбЕР№йУЛ№СЎ·ХиЕґЕ§дґйБТЎ ·Сй§ВС§гЛй»ГРКФ·ёФАТѕ·Т§ґйТ№ѕЕС§§Т№·ХиКЩ§ ·УгЛйЎТГгЄй§Т№КРґЗЎбЕР»ГРЛВСґЕ§г№АТѕГЗБдґйНВиТ§БТЎ№Си№аН§

К§З№ЕФўКФ·ёФм µТБѕГРГТЄєССµФЕФўКФ·ёФм ѕ.И. 2539 www.thailandindustry.com
Copyright (C) 2009 www.thailandindustry.com All rights reserved.
ўНК§З№КФ·ёФм ўйНБЩЕ а№ЧйНЛТ є·¤ЗТБ бЕРГЩ»АТѕ (г№КиЗ№·Хи·УўЦй№аН§) ·Сй§ЛБґ·Хи»ГТЎ®НВЩиг№аЗзєд«µм www.thailandindustry.com ЛйТББФгЛйєШ¤¤Егґ ¤СґЕНЎ ЛГЧН ·УКУа№Т ЛГЧН ґСґб»Е§ ўйН¤ЗТБЛГЧНє·¤ЗТБгґж ўН§аЗзєд«µм ЛТЎјЩйгґЕРаБФґ дБиЗиТЎТГЕНЎаЕХВ№ ЛГЧН№УКиЗ№Л№Ци§КиЗ№гґўН§є·¤ЗТБ№Хйд»гЄй ґСґб»Е§ вґВдБидґйГСєН№ШТµа»з№ЕТВЕСЎЙімНСЎЙГ ЁР¶ЩЎґУа№Ф№¤ґХ µТБ·ХиЎЇЛБТВєССµФдЗйКЩ§КШґ