НАФГСЎЙм №ТБб¶и§
µЕСєаБµГа»з№а¤ГЧиН§БЧНКУЛГСєЗСґГРВР·Т§ вґВ·СиЗд»бЕйЗКТВЗСґЁРа»з№вЕЛРєТ§аЎзєНВЩиг№µЕСє бµи¶йТЎТГЗСґг№ѕЧй№·Хи·ХидБиКРґЗЎµиНЎТГЕТЎКТВЎТГЗСґГРВР·Т§№Сй№ЁР·УдґйЕУєТЎ бЕРґйЗВаЛµШ№ХйЁЦ§а¤ГЧиН§БЧН№ХйўЦй№БТ аѕЧиНдБиа»з№ЎТГаКХВаЗЕТаЄФНиТ№є·¤ЗТБµиНдґйаЕВ¤ГСє
µЕСєаБµГдГйКТВГРєєНСЕµГТв«№ФЎ №Хйа»з№в¤Г§§Т№·ХиЁРЄиЗВНУ№ЗВ¤ЗТБКРґЗЎгЛй·иТ№КТБТГ¶ЗСґГРВР·Т§дґйКРґЗЎГЗґаГзЗ дБиµйН§ЕТЎКТВаЛБЧН№ЎТГЗСґґйЗВµЕСєаБµГбєєаґФБж НХЎµиНд» НХЎ·Сй§ВС§КТБТГ¶ЗСґдґйг№КАТЗѕбЗґЕйНБ·ХиЎТГЕТЎКТВЗСґ·УдґйЕУєТЎ НТ·ФаЄи№ г№·Хиб¤єЛГЧНєГФаЗіѕЧй№·Хи·ХиБХКФи§ЎХґўЗТ§бЕРНШ»КГГ¤µиТ§ж а»з№µй№ а№ЧиН§ЁТЎЎТГЗСґг№в¤Г§§Т№№ХйгЄйЛЕСЎЎТГКи§КСТіг№ГЩ»бєєўН§¤ЗТБ¶ХиаКХВ§НСЕµГТв«№ФЎКи§д»ВС§ЗСµ¶ШЛГЧНј№С§·ХиµйН§ЎТГЗСґГРВРбЕР¤У№З№аЗЕТЎТГКР·йН№ЎЕСєб»Е§БТа»з№ГРВР·Т§ ¤ЕЧи№НСЕµГТв«№ФЎ·ХиЗиТ№ХйБХ¤ЗТБ¶Хи 40 ЎФвЕаОФГµ«м«Ци§а»з№¤ЕЧи№аКХВ§·ХиаґФ№·Т§г№НТЎТИґйЗВ¤ЗТБаГзЗБТЎ ґС§№Сй№ЁЦ§·УгЛйЎТГЗСґ·УдґйНВиТ§ГЗґаГзЗбЕРбБи№ВУ№Си№аН§
ўйНґХўН§а¤ГЧиН§ЗСґГРВР·Т§бєєдГйКТВ ¤ЧН гЄй§Т№§иТВдБиµйН§аКХВаЗЕТБйЗ№аЎзє ЎТГбКґ§јЕЎзГЗґаГзЗ·С№гЁ ¶Ц§бБйЁРБХКФи§ЎХґўЗТ§ЛГЧННШ»КГГ¤µиТ§ж ЎзВС§КТБТГ¶ЗСґбЕР¤УіЗ№ѕЧй№·Хидґй аѕХВ§б¤иЛС№НСЕµГТв«№ФЎд»ВС§ЁШґ·ХиµйН§ЎТГЗСґбЕйЗЎґ»ШиБ аѕХВ§а·иТб¤и№ХйЎзГЩйГРВР·Т§бЕйЗ б¶БВС§КТБТГ¶ЗСґг№К¶Т№·ХиБЧґдґйґйЗВа№ЧиН§ЁТЎЎТГбКґ§јЕгЄй LCD ·ХиБХдїКиН§ѕЧй№ЛЕС§ КТБТГ¶БН§аЛз№дґй дБиµйН§гЄйдї©ТВКиН§КТВЗСґгЛйВШи§ВТЎ НХЎ·Сй§ЎТГбКґ§јЕјЩйаўХВ№дґйЎУЛ№ґгЛйбКґ§г№Л№иЗВа«№µФаБµГбЕР№ФйЗ ґС§№Сй№ЁЦ§КРґЗЎµиНЎТГНиТ№¤иТбЕРдБиµйН§б»Е§Л№иЗВгЛйВШи§ВТЎНХЎ ГРВР·Хив¤Г§§Т№№ХйКТБТГ¶ЗСґдґй ¤ЧН 2 а«№µФаБµГ¶Ц§ 4 аБµГ (µТБ¤ШіКБєСµГўН§вБґЩЕНСЕµГТв«№ФЎ)
НХЎЛ№Ци§ўйНґХ ¤ЧН КТБТГ¶ѕЎд»дЛ№БТдЛ№дґй·ШЎ·ХиµТБ·Хи¤ШіµйН§ЎТГ аѕГТРµСЗа¤ГЧиН§БХ№йУЛ№СЎаєТѕЎѕТ§иТВ а№ЧиН§ЁТЎБХў№ТґаЕзЎдБиаЎРЎРа·НР·Р гЄйбєµаµНГХи 9 вЗЕµма»з№бЛЕи§ЁиТВ ЛТЎдїЛБґЎзКТБТГ¶«ЧйНа»ЕХиВ№дґй·С№·Х ЛГЧН¶йТЛТЎ·иТ№БХбєµаµНГХиКУГН§ (Power bank) КУЛГСєв·ГИСѕ·мЎзКТБТГ¶№УБТгЄй§Т№дґйаЕВ·С№·Х «Ци§јЩйаўХВ№дґйННЎбєєгЛйКТБТГ¶аЕЧНЎгЄйдґйбЕйЗбµи¤ЗТБКРґЗЎўН§·иТ№јЩйгЄй
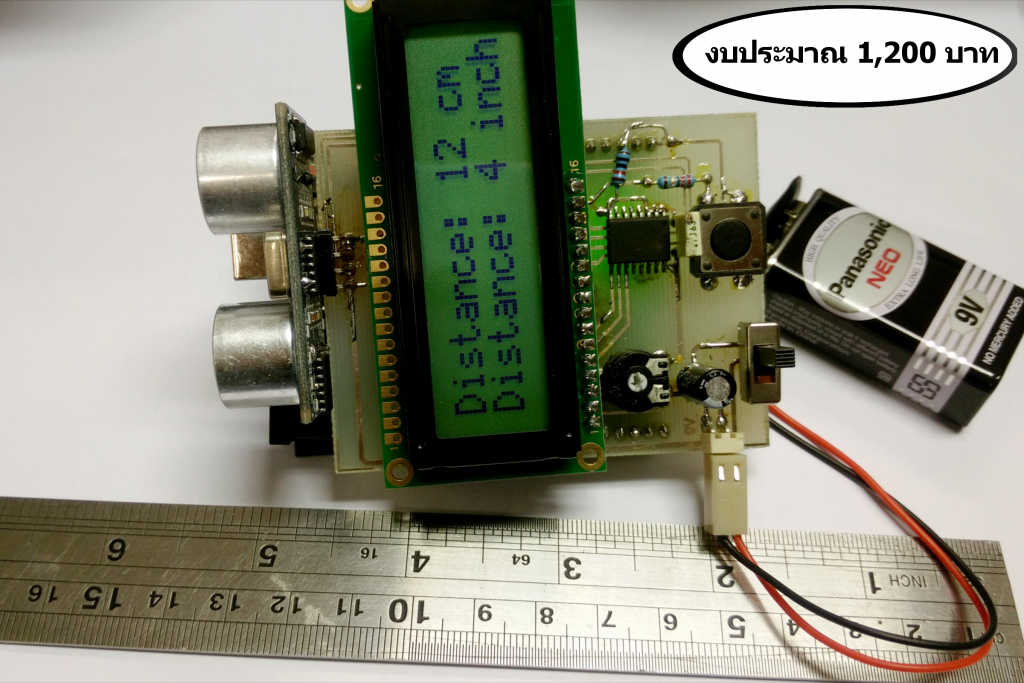
ГЩ»·Хи 1 З§ЁГКБєЩГім
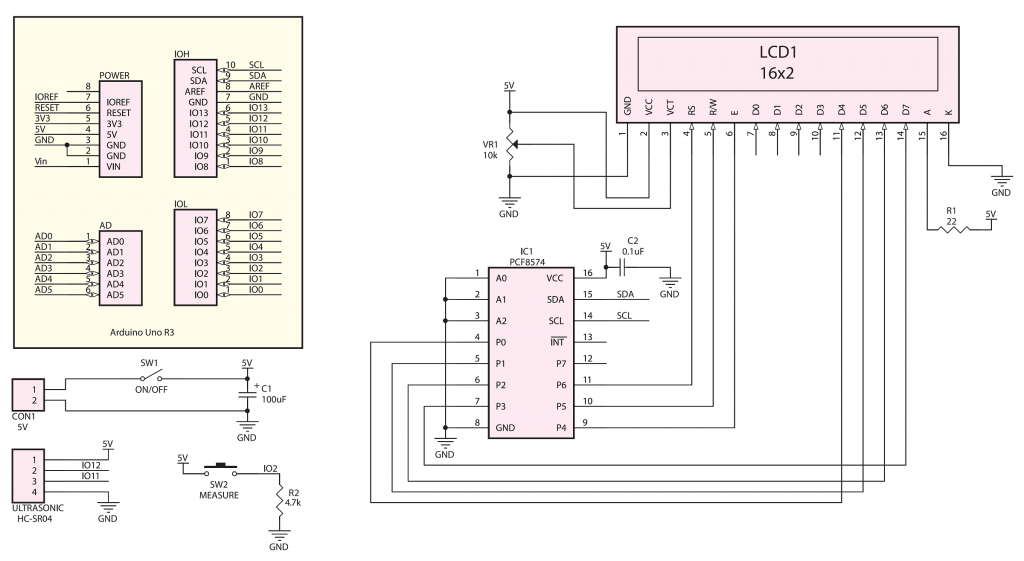
ГЩ»·Хи 1 а»з№З§ЁГКБєЩГімўН§в¤Г§§Т№№Хй ЁРаЛз№ЗиТЗ§ЁГБХдБиБТЎ ЛСЗгЁЛЕСЎЁРгЄй Arduino UNO а»з№µСЗ»ГРБТіјЕ·Сй§ЛБґ дґйбЎи ¤Зє¤ШБЎТГбКґ§јЕјиТ№ LCD ў№Тґ 16 µСЗНСЎЙГ 2 єГГ·Сґ, НиТ№¤иТЎТГЎґКЗФµЄмКУЛГСєЗСґ¤иТ (SW2) бЕРНиТ№¤иТГРВР·Т§ЁТЎНСЕµГТв«№ФЎ БТаГФиБ·У¤ЗТБаўйТгЁЎСєЎТГ·У§Т№ўН§З§ЁГдґйаЕВ¤ГСє
ГРєєНСЕµГТв«№ФЎ (Ultrasonic) ЛБТВ¶Ц§ ¤ЕЧи№аКХВ§·ХиБХ¤ЗТБ¶ХиКЩ§аЎФ№ЎЗиТ·ХиЛЩБ№ШЙВмЁРдґйВФ№ вґВ·СиЗд»бЕйЗЛЩўН§Б№ШЙВмвґВа©ЕХиВЁРдґйВФ№аКХВ§КЩ§¶Ц§аѕХВ§б¤и»ГРБТі 15 KHz а·иТ№Сй№ ґС§№С鹤ЕЧи№аКХВ§НСЕµГТв«№ФЎЁЦ§ЛБТВ¶Ц§¤ЕЧи№аКХВ§·ХиБХ¤ЗТБ¶ХиКЩ§ЎЗиТ 20 KHz ўЦй№д» бµиЁРБХ¤ЗТБ¶ХиКЩ§б¤идЛ№№Сй№дБидґйГРєШаНТдЗй а№ЧиН§ЁТЎўЦй№НВЩиЎСєЕСЎЙіРЎТГгЄй§Т№
КТаЛµШ·ХиБХЎТГ№УаНТ¤ЕЧи№ВиТ№НСЕµГТв«№ФЎБТгЄйЎзаѕГТРЗиТа»з№¤ЕЧи№·ХБХ·ФИ·Т§·УгЛйаГТКТБТГ¶гЄй¤ШіКБєСµФ№ХйБТгЄй§Т№дґй вґВгЄйЛЕСЎЎТГКР·йН№ЎЕСєўН§¤ЕЧи№аКХВ§ўН§а»йТЛБТВ·ХиµйН§ЎТГ «Ци§ЎТГБХ·ФИ·Т§ўН§¤ЕЧи№аКХВ§ВиТ№НСЕµГТв«№ФЎ·УгЛйаГТ№Уд»гЄй§Т№дґйЛЕТВНВиТ§ аЄи№ №Уд»гЄйг№а¤ГЧиН§¤Зє¤ШБГРВРдЎЕ (Ultrasonic remote control) а¤ГЧиН§ЕйТ§НШ»ЎГім (Ultrasonic cleaner) вґВгЛй№йУКСи№·Хи¤ЗТБ¶ХиКЩ§ а¤ГЧиН§ЗСґ¤ЗТБЛ№ТўН§ЗСµ¶ШвґВКС§аЎµГРВРаЗЕТ·Хи¤ЕЧи№КР·йН№ЎЕСєБТ а¤ГЧиН§ЗСґ¤ЗТБЕЦЎбЕР·Убј№·Хигµй·йН§·РаЕ гЄйг№а¤ГЧиН§ЛТµУбЛ№и§НЗСВЗРєТ§КиЗ№г№ГиТ§ЎТВ гЄй·ґКНєЎТГГСиЗдЛЕўН§·иН а»з№µй№
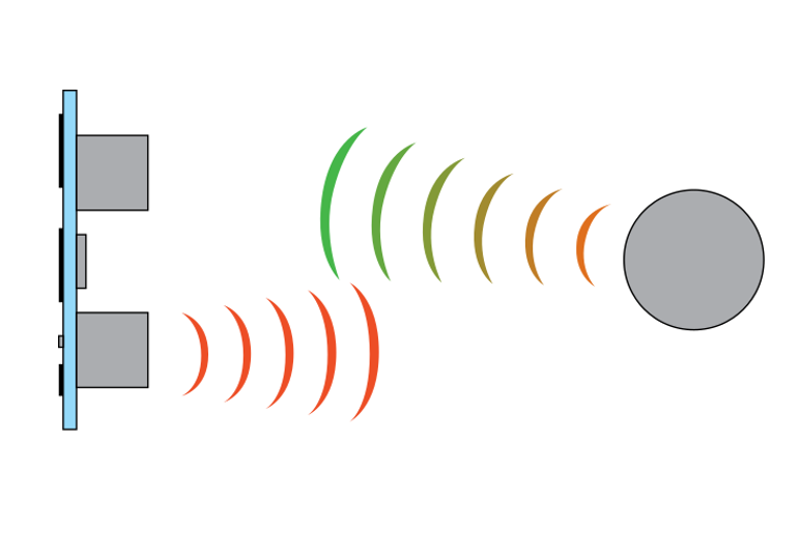
ГЩ»·Хи 2 ЎТГКР·йН№·Хи·УБШБ 15 Н§ИТ (Measuring Angle) ўН§вБґЩЕНСЕµГТв«№ФЎ
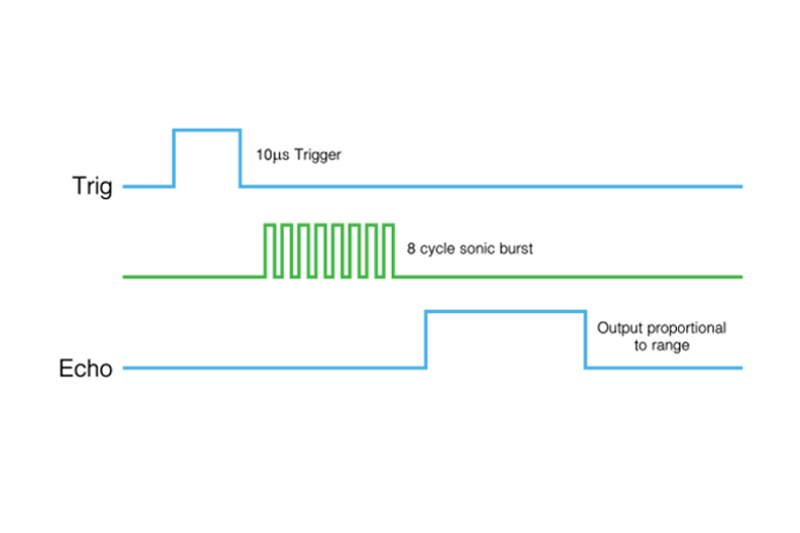
ГЩ»·Хи 3 Timing Diagram КУЛГСєЎТГЗСґГРВР·Т§
ГЩ»·Хи 3 а»з№ Timing Diagram ЎГРєЗ№ЎТГ·У§Т№ўН§НСЕµГТ«ФЎ вґВЁРаГФиБЁТЎЎТГКи§КСТіЕНЁФЎКЩ§ (Logic High) ·ХиўТ Trig ВТЗ 10 дБв¤ГЗФ№Т·Х аѕЧиНЎГРµШй№гЛйбЛЕи§ЎУа№ФґаКХВ§·У§Т№ ЁТЎ№Сй№ЁРКи§ѕСЕКм¤ЗТБ¶Хи 40 kHz ННЎд» 8 ЕЩЎ бЕйЗЎзГНаКХВ§·ХиЁРКР·йН№ЎЕСєБТ·ХиўТ Echo «Ци§вБґЩЕНСЕµГТв«№ФЎЁРБХНВЩи 2 µСЗ Л№Ц觵СЗЁРа»з№µСЗК觤ЕЧи№аКХВ§ННЎд»КиЗ№НХЎµСЗЁРа»з№µСЗГСє¤ЗТБ¶Хи·ХиКР·йН№ЎЕСєБТ бЕРа№ЧиН§ЁТЎ¤ШіКБєСµФўН§НШ»ЎГім·ХигЄйг№ЎТГЎУа№ФґаКХВ§БХЕСЎЙіРа»з№ЕУвѕ§ (Horn) ЁЦ§·УгЛйНСЕµГТв«№ФЎ·Хи№УБТгЄй№ХйБХБШБЗСґ 15 Н§ИТ (Measuring Angle) бЕРКТБТГ¶ЗСґГРВРЛиТ§дґйµСй§бµи 2 а«№µФаБµГ¶Ц§ 4 аБµГ
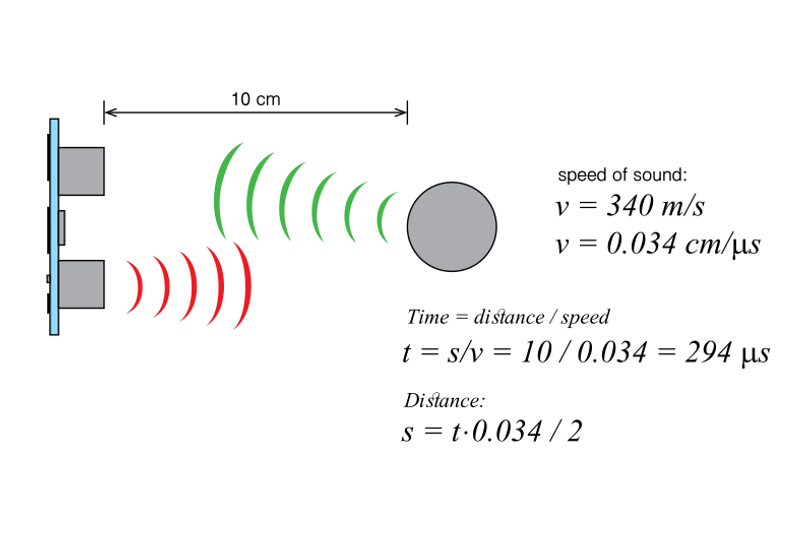
ГЩ»·Хи 4 µСЗНВиТ§ЎТГ¤У№ЗіаБЧиНЗСґГРВР 10 а«№µФаБµГ
ГЩ»·Хи 4 а»з№µСЗНВиТ§ЎТГЗСґ·ХиГРВР 10 а«№µФаБµГ вґВгЄй¤ЗТБаГзЗўН§аКХВ§¤ЧН 340 аБµГ/ЗФ№Т·ХЛГЧН 0.034 а«№µФаБµГ/дБв¤ГЗФ№Т·Х ґС§№С鹤ЕЧи№аКХВ§ЁРµйН§аґФ№·Т§»ГРБТі 294 дБв¤ГЗФ№Т·Х бµи¤иТ·ХидґйЁТЎўТ Echo ЁРµйН§ЛТГ 2 ЎиН№№Уд»гЄй§Т№ а№ЧиН§ЁТЎ¤ЕЧи№аКХВ§ЁРгЄйаЗЕТаґФ№·Т§д»бЕРКР·йН№ЎЕСє ґС§№Сй№ЎТГЁРдґйГРВР·Т§·Хиб·йЁГФ§ЁРµйН§ЛТГґйЗВ 2 бЕР¶йТЁРб»Е§а»з№Л№иЗВа«№µФаБµГЁРµйН§аНТГРВР·Хидґй¤ЩіґйЗВ 0.034 бЕРЛТГґйЗВ 2 НХЎ·ХЛ№Ци§
ЎТГ·У§Т№ Arduino UNO ЁР»ГРЎТИгЄй§Т№ўТ Trig дЗй·ХиўТ 12 бЕРўТ Echo ·ХиўТ 11 г№КиЗ№ўН§¤иТГРВРаЗЕТ·ХиНиТ№дґйЁТЎўТ Echo ЁР¶ЩЎаЎзєдЗй·ХиµСЗб»Г duration «Ц觵СЗб»Г№ХйЁУа»з№µйН§»ГРЎТИгЛйа»з№ Long а№ЧиН§ЁТЎ¤иТГРВР·Т§№ХйЁРБХ¤иТКЩ§а»з№ЛЕСЎЛЕТВѕС№¶Ц§ЛЕСЎЛБЧи№№Си№аН§ (·ХиГРВР·Т§ 170 а«№µФаБµГ¤иТ duration №ХйЁРа·иТЎСє 10,000)
ГЩ»·Хи 5 ЎТГ»ГРЎТИµСЗб»ГКУЛГСєв»ГбЎГБ Arduino
ЎТГ·У§Т№ўН§ LCD ў№Тґ 16 µСЗНСЎЙГ 2 єГГ·Сґ г№КиЗ№ўН§ЎТГаЄЧиНБµиНЎСє LCD гЄйЎТГКЧиНКТГН№ШЎГБбєє I2C (Inter-Integrated Circuit) «Ци§ЎТГКЧиНКТГбєє№ХйЁРгЄйаѕХВ§ 2 ўТа·иТ№Сй№ ЛТЎа·ХВєЎСєЎТГаЄЧиНБµиНвґВµГ§ГРЛЗиТ§ LCD ЎСє Arduino №Сй№ЁРгЄйўТаВНРБТЎ (НВиТ§µиУ 6 ўТ) ·УгЛйа»ЕЧН§ўТ·ХиНТЁЁРµйН§д»гЄй§Т№ЎСєНШ»ЎГімµиНѕиЗ§НЧи№ж ґС§№Сй№ЁРБХЎТГѕСІ№Т№УаНТ I2C БТ»ГРВШЎµмгЄй§Т№ЎСє LCD вБґЩЕ аѕЧиН·ХиЁРЕґЁУ№З№ўТ·ХиµйН§гЄйЁУ№З№БТЎ гЛйаЛЕЧНаѕХВ§ 2 КТВа·иТ№Сй№ ¤ЧНўТ SCL бЕР SDA №НЎЁТЎ№ХйВС§КТБТГ¶№УўТґС§ЎЕиТЗ№ХйµФґµиНЎСєНШ»ЎГімНЧи№·ХигЄй I2C дґйє№КТВаґХВЗЎС№ґйЗВ
ЛСЗгЁўН§ I2C вБґЩЕ ¤ЧНдН«Х PCF8574 «Ци§·УЛ№йТ·ХиГСєКСТіНФ№ѕШµ I2C БТЁТЎ Arduino ЁТЎ№Сй№ЁРЎУЛ№ґКАТЗРаНТµмѕШµКУЛГСєКС觧ҹ LCD гЛй·У§Т№µТБ¤УКСи§ ·ХиўТ A0, A1 бЕР A2 (ўТ1-3) ЁРгЄйЎУЛ№ґµУбЛ№и§ (Address) КУЛГСєаўйТ¶Ц§ LCD ґС§·ХиЎЕиТЗдЗйўйТ§µй№ЗиТўТ I2C №ХйаГТКТБТГ¶аЄЧиНБµиННШ»ЎГімдґйЛЕТВµСЗ ґС§№Сй№ЁЦ§µйН§ЎУЛ№ґµУбЛ№и§ўН§НШ»ЎГімдЗйґйЗВ µСЗНВиТ§аЄи№ ЛТЎ§Т№ўН§·иТ№ЁУа»з№µйН§гЄй LCD ЛЕТВµСЗ Address №ХйаѕЧиНЁРгЄйаѕЧиНаЕЧНЎ¤Зє¤ШБЁН LCD µСЗгґµСЗЛ№Ци§дґй «Ци§в¤Г§§Т№№ХйЁРаЄЧиНБµиНЕ§ЎГТЗґмўН§З§ЁГ №Си№бКґ§ЗиТјЩйаўХВ№ЎУЛ№ґµУбЛ№и§гЛйа»з№ “000” №Си№аН§ ·ХиўТ 3 ўН§бНЕ«ХґХЁРµиНЎСє VR1 (10K) аѕЧиН·УЎТГ»ГСєГРґСє¤ЗТБаўйБўН§µСЗНСЎЙГє№Л№йТЁН LCD
ЎТГгЄй§Т№ЁРБХКЗФµЄмНВЩи 2 µСЗ вґВ SW1 ЁРгЄйКУЛГСєа»Фґ-»ФґбГ§ґС№ 9 вЗЕµм·ХиµиННВЩиЎСє CON1 бЕРг№КиЗ№ўН§ SW2 гЄйЎґаѕЧиНЗСґГРВР·Т§ ·С駹ХйаѕЧиНдБигЛй Arduino ЗСґµЕНґаЗЕТ «Ци§аЛБТРКУЛГСє·иТ№·ХиµйН§ЎТГ¤§¤иТдЗйє№Л№йТЁН LCD бµи¶йТЛТЎµйН§ЎТГгЛй Arduino ЗСґ¤иТµЕНґаЗЕТ·иТ№КТБТГ¶Ўґ SW2 ¤йТ§дЗйдґй
ГЩ»·Хи 6 ЕТВЗ§ЁГў№Тґа·иТбєє
ГЩ»·Хи 7 µУбЛ№и§ЎТГЕ§НШ»ЎГім
ГЩ»·Хи 8 ЎТГєСґЎГХ¤Н№а№зЎаµНГмўН§ LCD
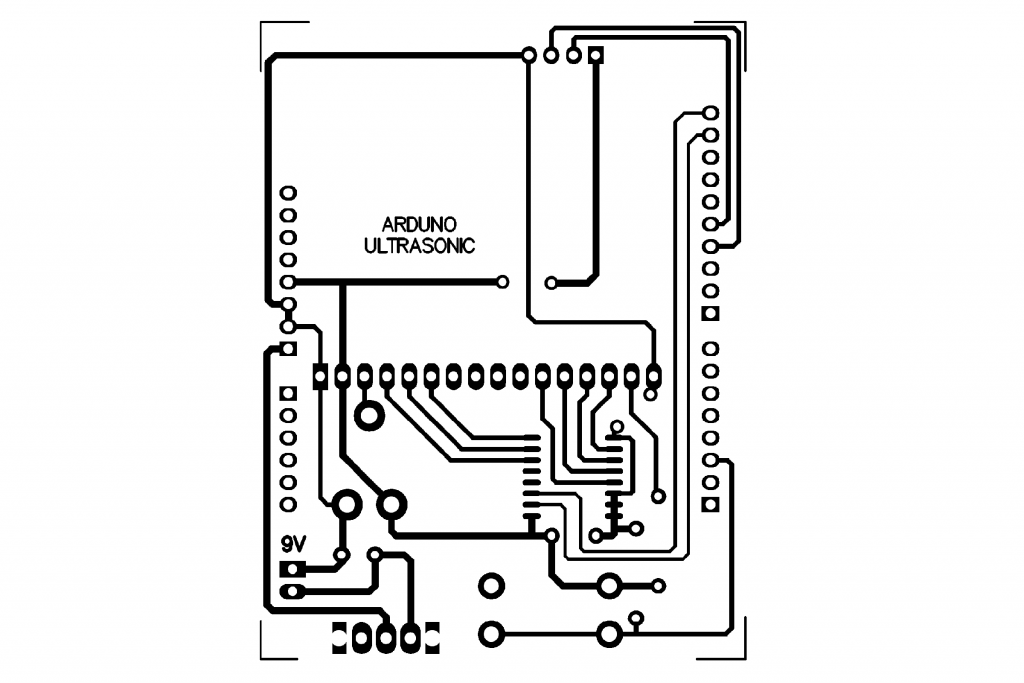
ГЩ»·Хи 7 а»з№µУбЛ№и§ЎТГЕ§НШ»ЎГімўН§в¤Г§§Т№№Хй ЁРКС§аЎµЗиТЕТВЗ§ЁГ№Сй№БХаѕХВ§ґйТ№є№ (Top Layer) бЕРНШ»ЎГімЎзЁРЕ§·Т§ґйТ№є№ґйЗВ (Top Overlay) ЎТГЕ§НШ»ЎГімЁР¤иН№ўйТ§ВТЎЎЗиТв¤Г§§Т№·СиЗд»КСЎЛ№иНВ аѕГТРНШ»ЎГімЁРєСґЎГХґйТ№ЕТВЗ§ЁГѕФБѕм ґС§№Сй№ЁЦ§µйН§КС§аЎµЁШґєСґЎГХгЛйґХбЕР¤ЗГгЄйЛСЗбГ駻ЕТВаЕзЎж аѕЧиНгЛйКТБТГ¶єСґЎГХµУбЛ№и§гµй¤Н№а№зЎаµНГмдґйґС§бКґ§г№ГЩ»·Хи 8
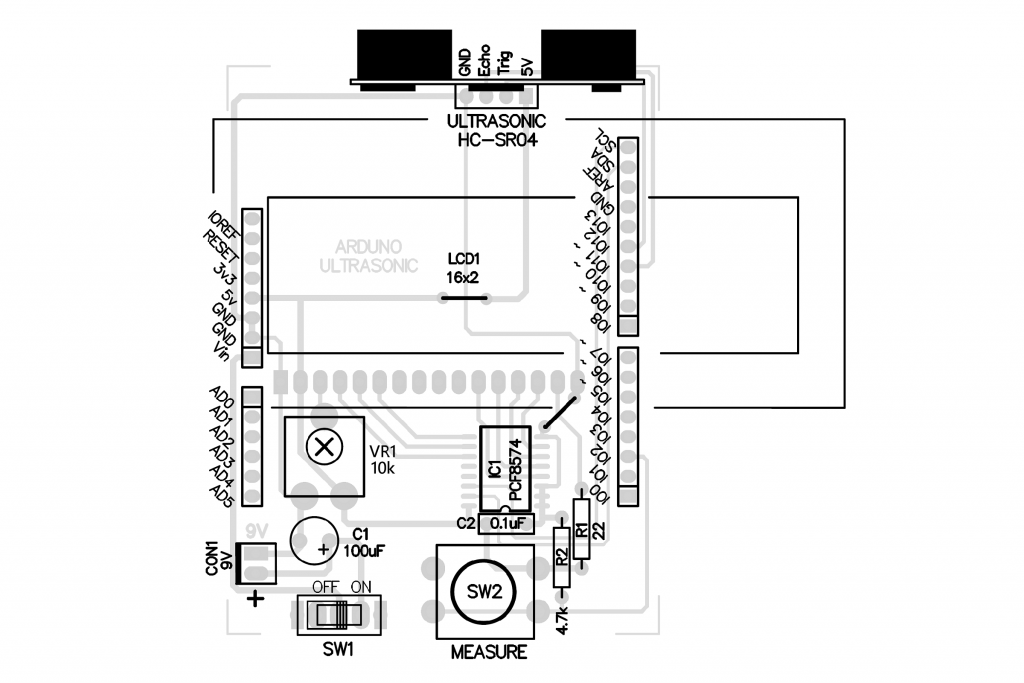
а№ЧиН§ЁТЎНШ»ЎГімБХ№йНВЄФй№ бµи¶Ц§бБйЗиТНШ»ЎГім№йНВЄФй№бµиЎТГЕ§НШ»ЎГім№С鹤иН№ўйТ§ВШи§ВТЎѕНКБ¤ЗГ ЁЦ§¤ЗГµйН§Е§НШ»ЎГім НВиТ§дГЎзµТБЎТГЕ§НШ»ЎГімЎз¤ЗГаГФиБЁТЎµСЗ·ХиБХ¤ЗТБКЩ§№йНВ·ХиКШґЎиН№ НТ·ФаЄи№ ЕЗґЁСкБбЕРµСЗµйТ№·Т№ а»з№µй№ ЁТЎ№Сй№ЁЦ§дЕиаГХВ§µТБЕУґСє¤ЗТБКЩ§Ё№ЎГР·С觤ú·ШЎµСЗ г№КиЗ№ўН§дН«Х IC1 (PCF8574) а»з№»ГРаА· SMD ¤ЗГµйН§гЄй¤ЗТБГРБСґГРЗС§аГЧиН§¤ЗТБГйН№ўіРєСґЎГХґйЗВ аѕГТРЛТЎбЄиЛСЗбГ駹ҹЁ№аЎФ№д»НТЁЁР·УгЛй IC1 аКХВЛТВдґй бµиЎзНВиТЎС§ЗЕБТЎЁ№аЎФ№д» аѕГТРНС№·ХиЁГФ§ЛТЎдБибЄиЛСЗбГй§дЗй№Т№ж Ўз¤§дБиѕС§§иТВж ¤ГСє
аБЧиНЕ§НШ»ЎГімЁ№¤ГєЛБґбЕйЗгЛйµГЗЁКНєбГ§ґС№г№З§ЁГ·Сй§ЛБґаКХВЎиН№ вґВгЛйгКиєНГмґ Arduino UNO Е§є№«зНЎаЎзµЎиН№ ЁТЎ№Сй№гЛйНйТ§НФ§ЎСєГЩ»·Хи 1 бЕР»йН№бЛЕи§ЁиТВдї 9 вЗЕµмµиНаўйТ CON1 ЛГЧНаЄЧиНБµиНаўйТѕНГм· USB ЛТЎгЄйбЛЕи§ЁиТВа»з№ Power Bank (ґС§бКґ§г№ГЩ»·Хи 9) ЁРµйН§ГРБСґГРЗС§аГЧиН§µУбЛ№и§ўСйЗґйЗВ ЁТЎ№Сй№гЛй№УвЗЕµмБФаµНГмБТЗСґГРЛЗиТ§ўТ 1 бЕРўТ 16 ўН§ IC1 (ЛГЧНўТ 1 бЕР 2 ўН§ LCD) ¶йТ¶ЩЎµйН§бГ§ґС№·ХидґйЁРµйН§а·иТЎСє 5 вЗЕµм ЛТЎбГ§ґС№·Хидґйа»з№д»µТБ№ХйбКґ§ЗиТѕГйНБЁР·ґКНєЎТГ·У§Т№ўСй№µН№µиНд»бЕйЗ
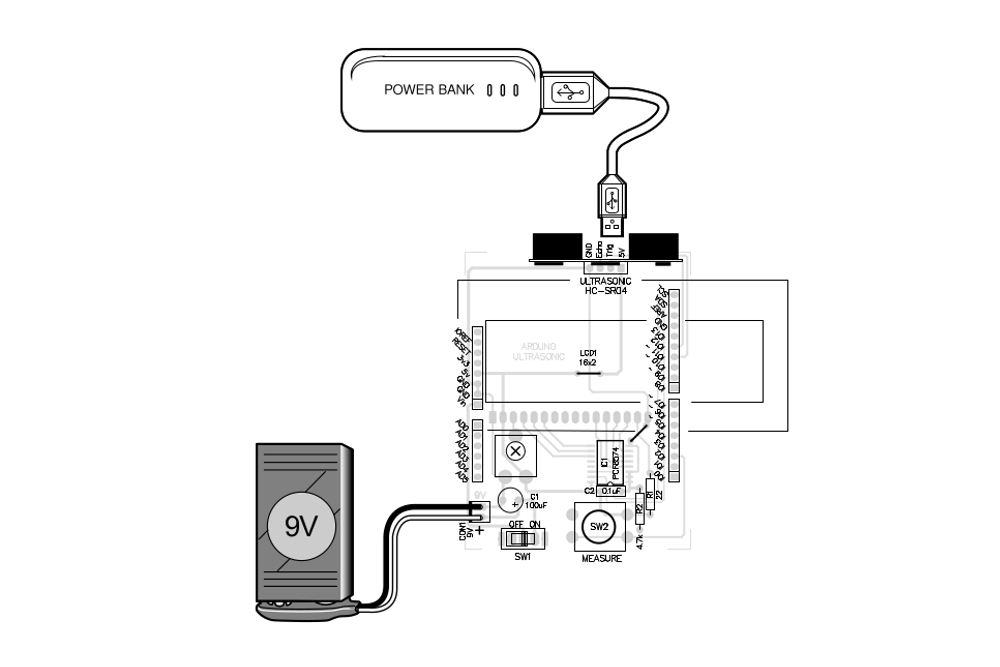
ГЩ»·Хи 9 ЎТГаЄЧиНБµиНЎСєбЛЕи§ЁиТВдї (аЕЧНЎГРЛЗиТ§бєµаµНГХи 9 вЗЕµмЎСє Power Bank)
аБЧиНБСи№гЁЗиТЎТГЕ§НШ»ЎГім¶ЩЎµйН§¤Гє·ШЎНВиТ§бЕйЗгЛйгКиНШ»ЎГім·ХиаЛЕЧН·Сй§ЛБґЕ§µУбЛ№и§ ЁТЎ№Сй№гЛй仴ТЗ№мвЛЕґв»ГбЎГБ Arduino IDE аЗНГмЄС№ 1.6.4 БТдЗй·Хиа¤ГЧиН§¤НБѕФЗаµНГмўН§·иТ№ а№ЧиН§ЁТЎдЕєГТГХи·ХигЄйГиЗБЎСєв¤Г§§Т№№ХйЁРГН§ГСє·ХиаЗНГмЄС№ґС§ЎЕиТЗ№Хй ЛТЎгЄйаЗНГмЄС№НЧи№НТЁЁРдБиКТБТГ¶гЄй§Т№в»ГбЎГБ№Хйдґй КТБТö仴ТЗ№мвЛЕґв»ГбЎГБ Arduino IDE аЗНГмЄС№ 1.6.4 дґй·ХиаЗзєд«µм https://www.arduino.cc/en/Main/OldSoftwareReleases#previous (ґС§бКґ§г№ГЩ»·Хи 10)
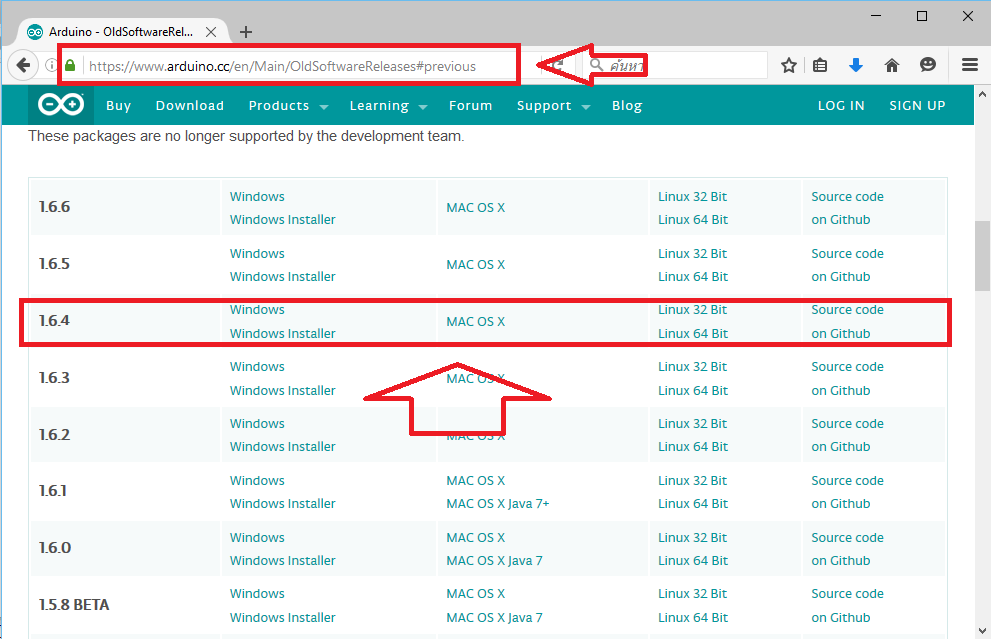
ГЩ»·Хи 10 аЗзєд«µмКУЛГСєґТЗ№мвЛЕґ Arduino IDE аЗНГмЄС№ 1.6.4
ЛЕС§ЁТЎ№Сй№д»ґТЗ№мвЛЕґдїЕм·ХигЄйГиЗБЎСєв¤Г§§Т№·ХиаЗзєд«µм http://electronics.se-ed.com/download гЛй·УЎТГа»ФґдїЕм SemiUltrasonic.ino ѕГйНБЎСє·УЎТГНСѕвЛЕґв»ГбЎГБ аБЧиНаКГзЁбЕйЗ·ХиЛ№йТЁН LCD ЁРбКґ§ўйН¤ЗТБ “SEMI TAPE” г№єГГ·СґбГЎбЕР “READY” г№єГГ·Сґ·ХиКН§ (ґС§бКґ§г№ГЩ»·Хи 11)

ГЩ»·Хи 11 Л№йТЁН LCD бКґ§ўйН¤ЗТБЛЕС§ЁТЎа»Фґа¤ГЧиН§
ЁТЎ№Сй№гЛй·ґКНєЗСґ¤иТвґВЎґ SW2 ¤йТ§дЗйўіР№Сй№·ХиЛ№йТЁНЁРбКґ§ГРВР·Т§Л№иЗВа«№µФаБµГг№єГГ·СґбГЎбЕРЛ№иЗВ№ФйЗг№єГГ·Сґ·ХиКН§ ЎТГЗСґа·ХВєаѕЧиНЛТ¤ЗТБбБи№ВУНТЁЁРгЄйдБйєГГ·СґаўйТБТЄиЗВг№ЎТГЛТГРВР·ХиЗСґдґй ЛТЎјЕ·Хидґйа»з№д»µТБ№ХйбКґ§ЗиТµЕСєаБµГдГйКТВўН§·иТ№№Сй№ѕГйНБгЄй§Т№бЕйЗ
КУЛГСєЎТГгЄй§Т№ЁГФ§·иТ№јЩйНиТ№НТЁЁР№У Laser pointer БТЄиЗВг№ЎТГЄХйЁШґЗСґ вґВ№УБТµФґµГ§ЎЕТ§ГРЛЗиТ§вБґЩЕНСЕµГТв«№ФЎ а№ЧиН§ЁТЎ¤ЕЧи№НСЕµГТв«№ФЎ№Сй№а»з№¤ЕЧи№аКХВ§ б№и№Н№ЗиТдБиКТБТГ¶БН§аЛз№ЁШґЎГР·єдґй ЎТГ№У Laser pointer БТЄиЗВЗСґ№Сй№ЁР·УгЛй·иТ№·ГТє¶Ц§µУбЛ№и§·ХиаГТЗСґдґйНВиТ§ЄСґаЁ№№Си№аН§
µУбЛ№и§ЎТГЕ§НШ»ЎГім
µСЗµйТ№·Т№ ¼ ЗСµµм +/-5%
R1 22 1 µСЗ
R2 4.7k 1 µСЗ
VR1 µСЗµйТ№·Т№»ГСє¤иТдґй 10k 1 µСЗ
µСЗаЎзє»ГРЁШ
C1 100uF 1 µСЗ
C2 0.1uF 1 µСЗ
НШ»ЎГімКТГЎЦ觵СЗ№У
IC1 PCF8574 1 µСЗ
НЧи№ж
CON1 ¤Н№а№зЎаµНГм 2 ўТ 1 µСЗ
LCD1 бНЕ«ХґХў№Тґ 16 µСЗНСЎЙГ 2 єГГ·Сґ 1 µСЗ
SW1 КЗФµЄмаЕЧиН№ 3 ўТ 1 µСЗ
SW2 КЗФµЄмЎґµФґ»ЕиНВґСєµСЗгЛи 1 µСЗ
ULTRASONIC вБґЩЕНСЕµГТв«№ФЎ HC-SR04 1 µСЗ
ЛБТВаЛµШ «НГмКв¤йґ·ХигЄйГиЗБЎСєв¤Г§§Т№КТБТГ¶ґТЗ№мвЛЕґ·ХиаЗзєд«µм http://electronics.se-ed.com/download
К§З№ЕФўКФ·ёФм µТБѕГРГТЄєССµФЕФўКФ·ёФм ѕ.И. 2539 www.thailandindustry.com
Copyright (C) 2009 www.thailandindustry.com All rights reserved.
ўНК§З№КФ·ёФм ўйНБЩЕ а№ЧйНЛТ є·¤ЗТБ бЕРГЩ»АТѕ (г№КиЗ№·Хи·УўЦй№аН§) ·Сй§ЛБґ·Хи»ГТЎ®НВЩиг№аЗзєд«µм www.thailandindustry.com ЛйТББФгЛйєШ¤¤Егґ ¤СґЕНЎ ЛГЧН ·УКУа№Т ЛГЧН ґСґб»Е§ ўйН¤ЗТБЛГЧНє·¤ЗТБгґж ўН§аЗзєд«µм ЛТЎјЩйгґЕРаБФґ дБиЗиТЎТГЕНЎаЕХВ№ ЛГЧН№УКиЗ№Л№Ци§КиЗ№гґўН§є·¤ЗТБ№Хйд»гЄй ґСґб»Е§ вґВдБидґйГСєН№ШТµа»з№ЕТВЕСЎЙімНСЎЙГ ЁР¶ЩЎґУа№Ф№¤ґХ µТБ·ХиЎЇЛБТВєССµФдЗйКЩ§КШґ