
ปัญญา มัฆะศร
สาขาวิชาเทคโนโลยีมีเดีย มหาวิทยาลัยเทคโนโลยีพระจอมเกล้าธนบุรี
เมื่อประเทศใดได้ก้าวเข้าสู่สังคมผู้สูงอายุ (Aging Society) เป็นจำนวนมากขึ้น การใช้เทคโนโลยีเข้ามามีส่วนช่วยในการดูแลและรักษาผู้สูงอายุที่เจ็บป่วยที่แต่ละประเทศควรให้ความสนใจเป็นอย่างยิ่ง หุ่นยนต์ จึงเป็นอีกทางเลือกหนึ่งที่จะถูกนำมาใช้แก้ปัญหาและอำนวยความสะดวกต่อปัญหาดังกล่าวนี้
จากหุ่นยนต์ขนาดจิ๋ว (Microbots) ที่สามารถเคลื่อนที่ไปในหลอดเลือดแดงของมนุษย์ หุ่นยนต์ผู้ช่วยส่วนตัวนี้จะช่วยให้การดูแลผู้ป่วยด้วยหุ่นยนต์ทางการแพทย์เปลี่ยนโฉมหน้าของการดูแลสุขภาพในอนาคต หุ่นยนต์ไม่ได้เป็นสิ่งใหม่แต่อย่างใด สำหรับการดูแลสุขภาพ ระบบดาวินชี (Da Vinci) ทำหน้าที่เป็นผู้ช่วยผ่าตัดโดยได้รับการอนุมัติจากองค์การอาหารและยาในปี 2000 โดยตั้งแต่นั้นมา ระบบได้ดำเนินการมากกว่า 20,000 ครั้งของการผ่าตัด และได้เป็นแนวทางสำหรับความก้าวหน้าของหุ่นยนต์ในการดูแลสุขภาพ ปัจจุบันผู้ผลิตได้ออกแบบหุ่นยนต์ที่มีประสิทธิภาพในการดูแลผู้ป่วยได้มากยิ่งขึ้น ยกตัวอย่าง เช่น Microbots ที่มีส่วนประกอบของกลุ่มแม่เหล็กขนาดเล็ก ๆ โดยหุ่นยนต์สามารถเดินทางไปในกระแสเลือดของมนุษย์ เพื่อทำหน้าที่สมานแผลหรือรักษาอาการเฉพาะจุด สามารถค้นหาและกำจัดเนื้องอก ขูดลิ่มเลือดคั่งในหลอดเลือด รวมถึงการติดเชื้อแบคทีเรียในกระแสเลือดที่เป็นอันตรายถึงชีวิตหรือช่วยในเงื่อนไขเกี่ยวกับตาและการฉายโรค เป็นต้น ในอีกไม่กี่ปีข้างหน้า “หุ่นยนต์บริการ” ที่คาดว่าจะเข้าสู่ภาคการดูแลสุขภาพที่นับวันจะมีจำนวนผู้สูงอายุเพิ่มมากขึ้นทุก ๆ ปี จากภาพยนตร์เรื่องสตาร์วอที่มีหุ่นยนต์ R2-D2 แบกถาดบริการเครื่องดื่ม จากภาพยนตร์สู่โรงพยาบาลที่ดูแลผู้ป่วยโดยใช้หุ่นยนต์ ซึ่งหุ่นยนต์ที่ใช้ในโรงพยาบาลจะเพิ่มเทคโนโลยีการสื่อสารระยะทางไกลที่เรียกว่า “Telemedicine” เพื่อใช้ดูแลผู้ป่วยทางบ้าน เนื่องจากผู้ป่วยมีข้อจำกัดในการเดินทางมารักษาทางโรงพยาบาลของตัวผู้ป่วยเอง ระบบการสื่อสารดังกล่าวเป็นแบบ 2 ทิศทาง และถูกนำมาใช้โดยแพทย์ที่สามารถสื่อสารกับผู้สูงอายุหรือการติดตามรายละเอียดของผู้ป่วยที่ได้รับการรักษาเบื้องต้นผ่านอุปกรณ์คอมพิวเตอร์ กล้อง และชุดควบคุมจอภาพหุ่นยนต์
Vasteras Giraff คือ หุ่นยนต์ที่ใช้ระบบการสื่อสารแบบไร้สายแบบ 2 ทิศทาง ที่ได้รับความนิยมในสังคมของผู้สูงอายุ โดยใช้รีโมทในการควบคุมการทำงาน การเคลื่อนที่ด้วยล้อ กล้องและจอแสดงผลด้วยภาพและเสียงผ่านลำโพงที่ติดตั้งที่ตัวหุ่นยนต์ ซึ่งมีการใช้งานเช่นเดียวกับระบบวิดีโอคอนเฟอร์เรนต์ โดยหมอสามารถสื่อสารผ่านหน้าจอคอมพิวเตอร์ในสถานที่อื่น ๆ ได้ ส่วนผู้ป่วยสามารถควบคุมหุ่นยนต์ผ่านระบบคอมพิวเตอร์ด้วยรีโมทควบคุม ตัวอย่างการใช้งาน เช่น ผู้เป็นหมออาจอธิบายวิธีการรับประทานยาที่ถูกต้องผ่านหุ่นยนต์ให้กับผู้ป่วยหรือการสอนผู้สูงอายุที่พักอาศัยภายในบ้านปฎิบัติตนเช่นไรอย่างถูกต้องเกี่ยวกับการใช้ชีวิตประจำวัน เป็นต้น โดยปัจจุบันมีการใช้ใน 7 ประเทศในทวีปยุโรปและมีการผลิตมากกว่า 20 เครื่อง โดยจุดประสงค์หลักในการทำงาน คือ หุ่นยนต์จะรับฟังผู้ใช้งานและแสดงผลตอบรับกลับไปยังผู้ใช้งาน Giraff เป็นเทคโนโลยีที่ถูกสร้างขึ้นในประเทศสวีเดนในปี 2009 และได้มีการนำมาใช้ในปี 2011 ซึ่งได้รับรางวัลชนะเลิศ โดย Giraff เป็นการค้นคว้าวิจัยในชื่อโครงการที่มีชื่อเรียกว่า “GiraffPlus” และนักวิเคราะห์ได้ประเมินการทำงานของหุ่นยนต์ที่สามารถใช้เทคโนโลยีที่ช่วยดูแลผู้สูงอายุภายในบ้านได้อย่างเหมาะสม

รูปที่ 1 แสดงหุ่นยนต์ Vasteras Giraff ที่ใช้แนวคิดการออกแบบมาจากยีราฟ
(ข้อมูลรูปจากอินเตอร์เน็ต)
Aethon TUG เป็นระบบอัตโนมัติที่ใช้ในโรงงานที่ใช้ในการเคลื่อนย้ายวัสดุ เช่น ชุดยาและผ้า ชุดอาหาร เป็นต้น จากพื้นที่หนึ่งไปยังอีกพื้นที่หนึ่งในโรงพยาบาล โดยหุ่นยนต์สามารถเคลื่อนที่ในโรงพยาบาลหรือหน่วยงานที่ใช้ลิฟต์ในเวลาใด ๆ ในระหว่างวันได้ เพื่อการส่งมอบหมายภาระงานที่กำหนดหรือตามความต้องการของผู้ใช้ นอกจากนี้ ผู้ใช้งานสามารถเพิ่มระบบโครงสร้างการยกหรือแบกสัมภาระต่าง ๆ สำหรับการใช้งานที่หลากหลายในการขนส่งวัสดุ โดยระบบจะมีส่วนช่วยให้การขนส่งวัสดุได้จำนวนครั้งที่เพิ่มมากขึ้นและใช้เวลาในการทำงานลดน้อยลง โดยหุ่นยนต์จะมีการจัดตารางเวลาในการทำงานและผู้ใช้สามารถที่จะควบคุมระบบให้แยกประเภทการใช้งานในโรงพยาบาลที่มีแลกเปลี่ยนหมายกำหนดการตามที่กำหนดอยู่ตลอดเวลา มันสามารถจำแนกประเภทวัสดุได้อย่างอิสระ
จากรูปที่ 2(B) ด้านซ้ายมือ ผู้ใช้สามารถวางแผนกำหนดเส้นทางที่ดีที่สุดจากตำแหน่งเริ่มต้นในการเคลื่อนที่ของหุ่นยนต์ให้ถึงเป้าหมายด้วยการตรวจจับด้วยเซนเซอร์ป้องกันการปะทะชนกับสิ่งต่าง ๆ โดยการใช้แผนที่เสมือนจริงของพื้นที่ชั้นต่าง ๆ ของโรงพยาบาลที่จัดเก็บไว้ในหน่วยความจำ โดยหุ่นยนต์จะพยายามกระทำตามแผนผังที่กำหนดให้มากที่สุดเท่าที่เป็นไปได้ แต่ถ้าพบอุปสรรคที่ไม่คาดคิดในเส้นทางที่ต้องการ หุ่นยนต์สามารถปรับเปลี่ยนแผนและหาทางออกที่จะนำไปมันไปสู่ปลายทางที่กำหนด จากรูปที่ 2(B) ด้านขวามือ หุ่นยนต์นี้สามารถเคลื่อนที่ในสภาพแวดล้อมจากจุดหนึ่งไปยังอีกจุดหนึ่งด้วยการขับเคลื่อนมอเตอร์จำนวน 2 ตัว นอกจากนี้ หุ่นยนต์ยังสามารถใช้ลิฟต์และเปิดประตูแบบอัตโนมัติผ่านทางสัญญาณไร้สายด้วยระบบอีเธอร์เน็ตและเมื่อเกิดการสูญหายหรือติดปัญหาอุปสรรคอยู่ก็สามารถโทรขอความช่วยเหลือผ่านทางลำโพง เพื่อบอกเจ้าหน้าที่ ๆ รับผิดชอบต่อไป
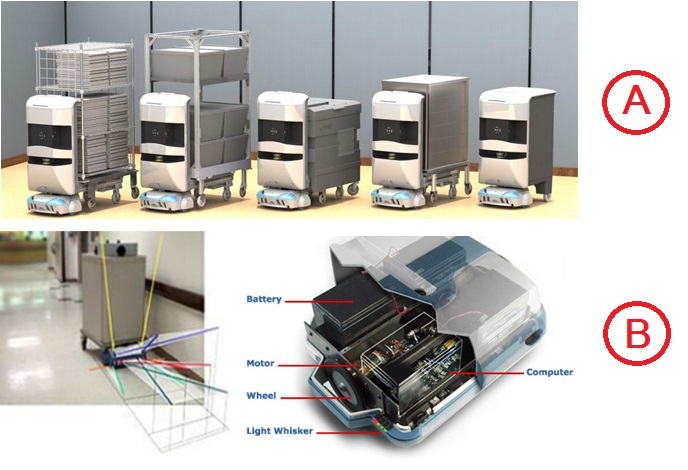
รูปที่ 2 (A) แสดงการปรับเปลี่ยนโครงสร้างการทำหน้าที่ของหุ่นยนต์ให้เกิดความเหมาะสมกับการใช้งานที่หลากหลาย
(B) การกำหนดแผนที่การใช้งานแต่ละพื้นที่และชุดกลไกการขับเคลื่อนของหุ่นยนต์ ตามลำดับ
(ข้อมูลรูปจากอินเตอร์เน็ต)
ในปี 2012 มีการสร้างหุ่นยนต์ของบริษัท Emerging Technologies Group และบริษัท InTouch Health เพื่อการออกแบบเทคโนโลยีที่เรียกว่า “AVA Telepresence Technology” เพื่อใช้สำหรับการตรวจสอบสุขภาพของผู้ป่วยที่มีประสิทธิภาพที่ดีกว่า โดยทั้ง 2 บริษัทได้พัฒนารีโมทควบคุมและการสร้างภาพเสมือนจริงที่แยกการทำงานอย่างอิสระออกจากกันหรือมีชื่อเรียกว่า “RP-VITA” ดังนั้น หุ่นยนต์ IRobot สามารถใช้เป็นเครื่องมือสื่อสารในระยะทางไกลสำหรับการรักษาผู้ป่วย เพื่อให้นักฟิสิกส์สามารถตรวจสอบสุขภาพของผู้ป่วยจากระยะทางไกล ๆ การใช้งานระบบดังกล่าว คือ การสร้างเป็นแผนที่ เพื่อหลบสิ่งกีดขวางและสามารถใช้ IPad ที่มีหน้าจอสำหรับการควบคุมและแสดงปฏิกิริยาในการโต้ตอบ ซึ่งหุ่นยนต์ยังสามารถที่จะจดจำหน้าและอุปกรณ์ในการรักษา ซึ่งจะทำการบันทึกลงในระบบ EMR การนำเสนอรูปแบบของระบบ RP-VITA โดย Chairman ซึ่งเป็น CEO ของ IRobot กล่าวว่า ในอนาคตอาจจะได้เห็น IRobot มากมายตามท้องตลาด
Bestic คือ หุ่นยนต์ขนาดเล็กที่สามารถหมุนได้รอบทิศทางและที่ปลายประกอบไปด้วยส่วนประกอบที่มีลักษณะคล้ายช้อน โดยที่แขนหุ่นยนต์สามารถหมุนได้ง่ายและผู้ใช้สามารถที่จะควบคุมการหมุนของปลายช้อนในถาดหรือจานรับประทานอาหารได้อย่างอิสระ โดยจุดประสงค์ของบริษัท คือ การออกแบบหุ่นยนต์ให้มีขนาดเท่ากับโต๊ะทำให้ผู้ใช้สามารถที่จะเพิ่มอุปกรณ์อื่นที่ใช้ในการควบคุมได้ เช่น จอยสติกส์ ปุ่มควบคุมและสนับสนุนต่อการควบคุมด้วยเซนเซอร์ที่ติดตั้งบนศีรษะ เป็นต้น
Sten Hemmingson เป็นผู้เชี่ยวชาญด้านการออกแบบอุปกรณ์ที่ใช้สำหรับการรับประทานได้พัฒนาแขนกลที่สามารถตอบสนองความต้องการสำหรับการรับประทานอาหาร โดยอุปกรณ์ Bestic Arm เป็นการสร้างโดยพี่น้องวิศวกรเครื่องกล คือ “Ann-Louise Noren” ในพัฒนาโครงการหุ่นยนต์ Bestic ที่ช่วยเหลือทหารที่กำลังบาดเจ็บหรือออกใบสั่งยาได้อย่างมีประสิทธิภาพ

รูปที่ 3 แสดงการใช้งานหุ่นยนต์และรูปทรงในมิติต่าง ๆ ตามลำดับ
(ข้อมูลรูปจากอินเตอร์เน็ต)

รูปที่ 4 แสดงการใช้งานหุ่นยนต์และอุปกรณ์เสริมการใช้งาน ตามลำดับ
(ข้อมูลรูปจากอินเตอร์เน็ต)
Nursing Assistant คือ หุ่นยนต์สำหรับดูแลสุขภาพ “Nursing Assistant” ใช้ระบบควบคุมแบบ DPI (Direct Physical Interface) ซึ่งจะทำให้พยาบาลสามารถที่จะควบคุมหุ่นยนต์ได้โดยตรงตามหลักขนาดและสัดส่วนของร่างกายมนุษย์ (Human-Scale) โดยหุ่นยนต์ดังกล่าวมีชื่อเรียกว่า “Cody” ซึ่งการใช้ระบบ DPI ในการนำทางและกำหนดตำแหน่งโดยตรงกับร่างกายของผู้รับบริการ เมื่อผู้ใช้คว้าและมีการเคลื่อนที่หรือมีการเชื่อม “Black Rubber Balls” ทิ่ดตั้งไว้กับตัวหุ่นยนต์ ยกตัวอย่างเช่น การเคลื่อนที่ไปข้างหน้ากับการที่ให้หุ่นยนต์หยุดเคลื่อนที่จะกระทำที่คล้ายกัน การที่หุ่นยนต์เคลื่อนที่ไปทางขวาและเคลื่อนที่ไปทางซ้าย สาเหตุมาจากการที่หุ่นยนต์สามารถที่จะหมุนได้ ผู้ใช้งานสามารถที่จะเก็บแขนของ Cody ได้และสามารถที่หุ่บแขนไปยังหัวไหล่ได้เพราะว่า Cody สามารถเคลื่อนที่ได้ทุกรูปแบบ หุ่นยนต์ประกอบด้วย Segway RMP 50 Omni Mobile Base แอคทูเอเตอร์เชิงเส้นแนวตั้งขนาด 1-DoF และแขนคู่ของหุ่นยนต์ขนาด 7-DoF หุ่นยนต์นี้ได้แสดงให้เห็นความสามารถบางอย่างที่น่าประทับใจสวย มันสามารถเปิดประตูลิ้นชักและตู้ควบคุม โดยใช้จุดสมดุลที่พัฒนาโดย ผู้ช่วยศาสตราจารย์ เชนและศาสตราจารย์ ชาร์ลีเคมพ์
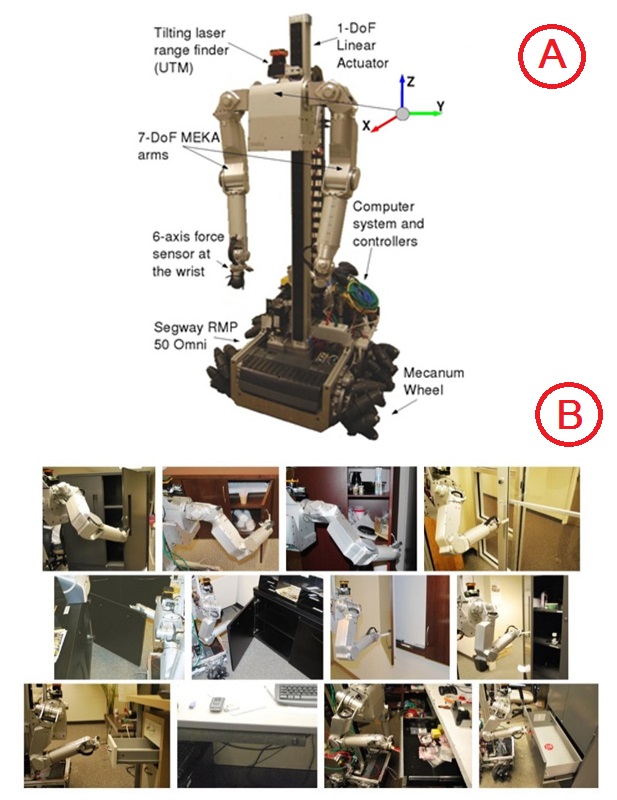
รูปที่ 5 (A) และ (B) แสดงส่วนขององค์ประกอบหลักของหุ่นยนต์และโคดี้กับอิริยบทต่าง ๆ สำหรับการใช้งาน ตามลำดับ
(ข้อมูลรูปจากอินเตอร์เน็ต)
• หุ่นยนต์สามารถดึงประตูเปิดและลิ้นชัก: การเคลื่อนที่ของล้อแบบ “Omni-Directional Base” รอบทิศทางและการเคลื่อนที่ของแขนที่สอดคล้องกับการควบคุมในแบบสมดุล (ICRA 2010)
• ใช้สำหรับการประเมินผลของการเชื่อมต่อทางกายภาพโดยตรงสำหรับหุ่นยนต์ผู้ช่วยพยาบาล (HRI 2010)
สังคมผู้สูงอายุเป็นอีกปัจจัยหนึ่งที่ทำให้หลายประเทศประสบปัญหาการขาดแคลนแรงงานและผลักดันให้หน่วยงานต่าง ๆ ต้องนำหุ่นยนต์เข้ามาแทนแรงงานมนุษย์ โดยมีการคาดการณ์ของสถาบันวิจัยประชากรและสังคมของ ม.มหิดล แสดงข้อมูลให้ทราบว่าประเทศไทยกำลังจะก้าวเข้าสู่การเป็นสังคมผู้ผู้อายุเต็มรูปแบบ อันมีผลมาจากความก้าวหน้าทางวิทยาการทางการแพทย์ทำให้คนไทยมีอายุยืนยาวขึ้น แต่ในขณะเดียวกันรูปแบบครอบครัวในสังคมไทยก็เปลี่ยนแปลงเป็นลักษณะครอบครัวเดียวกันมากขึ้น จึงส่งผลสำคัญต่อ ผู้สูงอายุ เพราะขาดบุคคลในครอบครัว คอยดูแล ดังนั้น หุ่นยนต์ช่วยเหลือผู้สูงอายุ จึงเป็นอีกทางเหลือหนึ่งที่จะเข้ามาช่วยแก้ปัญหาดังกล่าว
สงวนลิขสิทธิ์ ตามพระราชบัญญัติลิขสิทธิ์ พ.ศ. 2539 www.thailandindustry.com
Copyright (C) 2009 www.thailandindustry.com All rights reserved.
ขอสงวนสิทธิ์ ข้อมูล เนื้อหา บทความ และรูปภาพ (ในส่วนที่ทำขึ้นเอง) ทั้งหมดที่ปรากฎอยู่ในเว็บไซต์ www.thailandindustry.com ห้ามมิให้บุคคลใด คัดลอก หรือ ทำสำเนา หรือ ดัดแปลง ข้อความหรือบทความใดๆ ของเว็บไซต์ หากผู้ใดละเมิด ไม่ว่าการลอกเลียน หรือนำส่วนหนึ่งส่วนใดของบทความนี้ไปใช้ ดัดแปลง โดยไม่ได้รับอนุญาตเป็นลายลักษณ์อักษร จะถูกดำเนินคดี ตามที่กฏหมายบัญญัติไว้สูงสุด




